

Fyra vanliga typer av 3D-vision
När 3D-visionstekniken fortsätter att utvecklas har olika lösningar dykt upp för att möta olika industriella och kommersiella behov. I denna artikel utforskar HIFLY fyra vanliga 3D-bildningstekniker, analyserar deras funktionsprinciper, fördelar, begränsningar och typiska tillämpnings-scenarier.
1. Binögonkamera
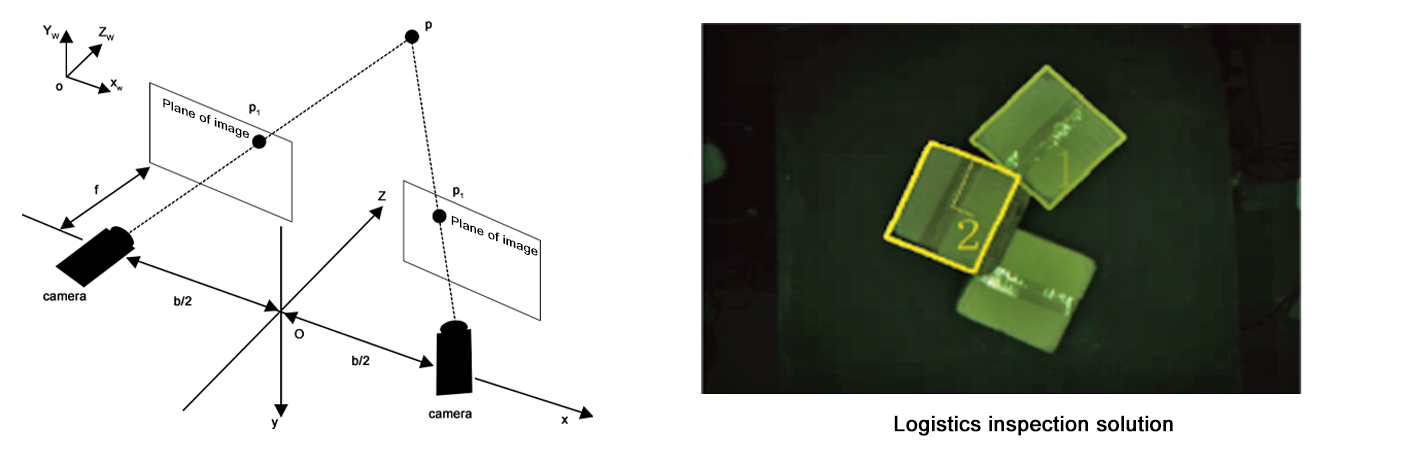
Fungerar likt människans binögonvision, använder stereovisionsystem två vinklade kameror för att fånga bilder från något skilda perspektiv. Genom att beräkna pixeldisplacement (disparity) mellan de båda bilderna kan systemet uppskatta djupinformation och återskapa 3D-modeller.
Fördelar:
Lågkostnads-hardwarekonfiguration
Enkel systemarkitektur
Enkel implementation och drift
Begränsningar:
Begränsad precision (typiskt på millimeter-nivå)
Otillräcklig för högprecisionsindustriella tillämpningar
Tillämpningar: Grundläggande objektigenkänning, autonom fordonssökning och konsumentsnabb djupdetektering.
2. Laserlinje profiler
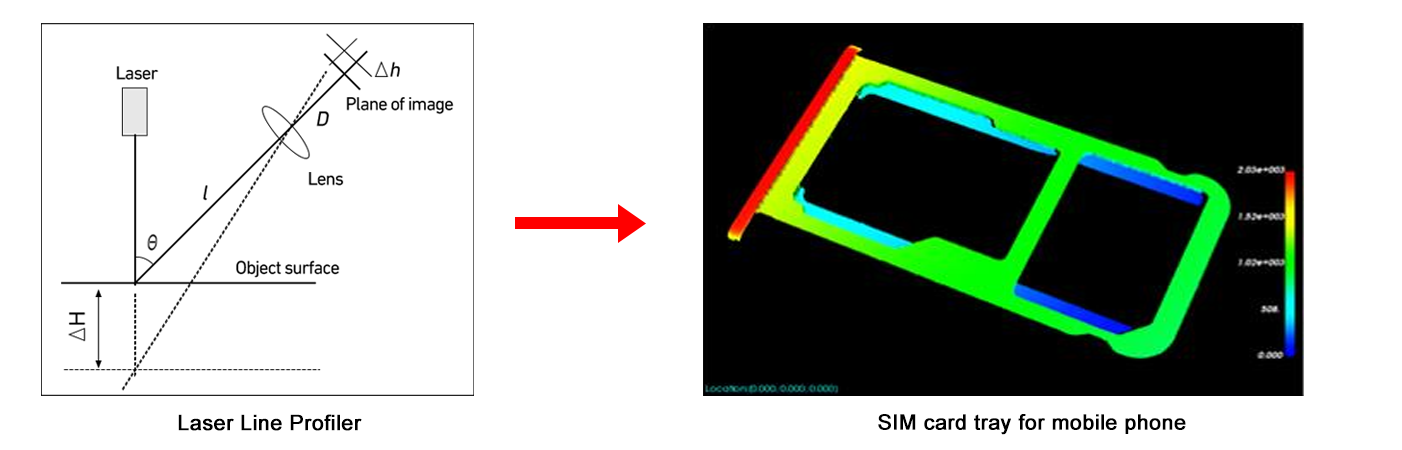
Detta system kombinerar en lasers radprojektor med en kamera som är placerad i en fix vinkel. När lasersliten skenner över ett rörligt objekt, captar kameran deformationer i den projicerade linjen för att generera 3D-punktmoln.
Fördelar:
Exceptionell Z-axel precision (på sub-mikron nivå)
XY-axel noggrannhet inom tiotals mikrometer
Idealiskt för jämnhetshög-noggrann höjd mätning
Begränsningar:
Kräver koordinerad mekanisk rörelse
Prestanda försämras med reflektiva ytor
Industriell Dominans: För närvarande den mest omfattande antagna 3D-visionslösningen inom tillverkning för kvalitetsinspektion och dimensionsverifiering.
3. Strukturerad Ljus 3D-kamera
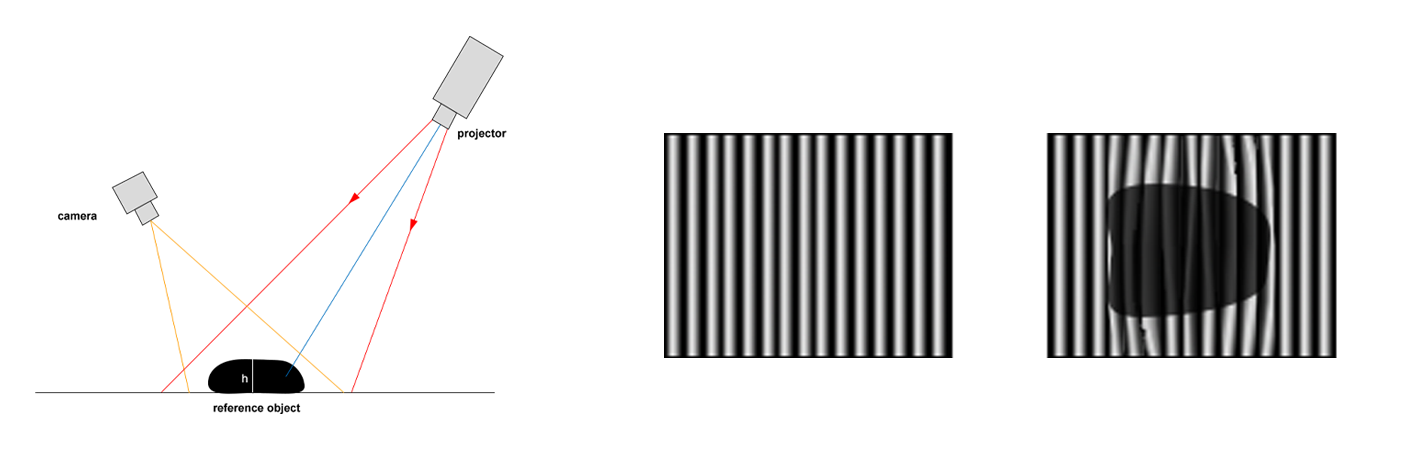
Denna teknik projicerar kodade ljuspåterningar (nät eller prickmönster) på mål. En eller flera kameror analyserar sedan de förvridna mönstren som orsakas av objektytor för att beräkna 3D-koordinater.
Fördelar:
Kontaktfri mätning
Förmåga att skanna i rörelsestillstånd
Mikronivåprecision i små synfält
Effektiv i storskaliga tillämpningar
Begränsningar:
Högre utrustningskostnader
Känslig för störningar av omgivningsljus
Primär tillämpning: 3D slumpmässig grepp
4. Time-of-Flight (ToF) Laserscanner
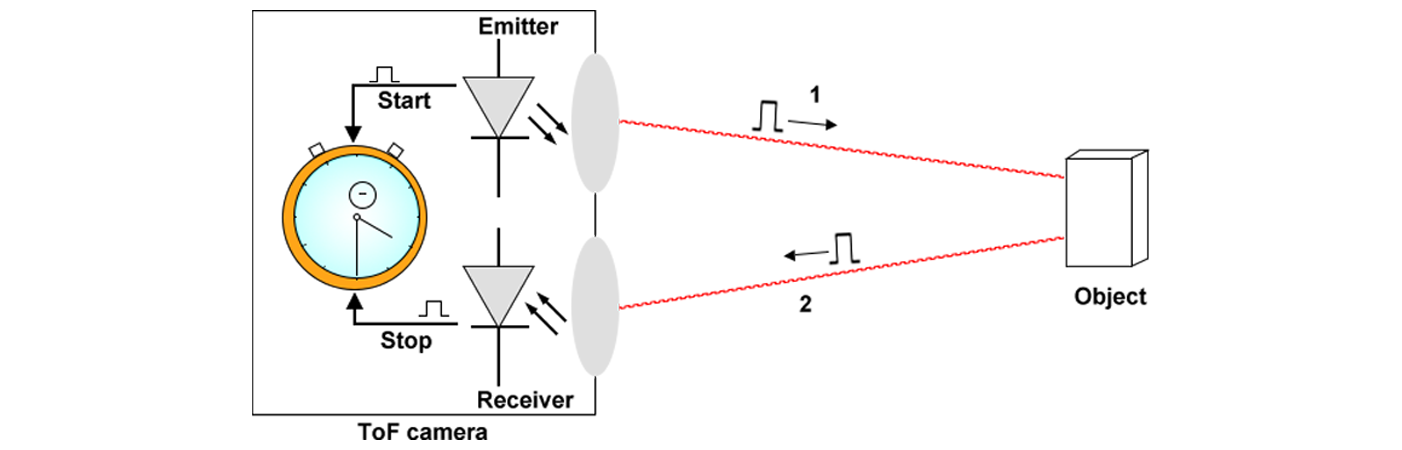
ToF-system mäter den totala tiden för infraröda lasersignalerna att återvända för att beräkna avstånd. Denna direktmätning av flygtid möjliggör realtids 3D-mappning.
Fördelar:
Utömordentlig prestanda i realtid
Fullfält djupinläsning
Kompakt systemstorlek
Begränsningar:
Begränsad mätprecision
Känslig för multipath-störningar
Kommeriell förekomst: Mycket används inom konsumerelektronik (VR/AR), säkerhetssystem och medicinsk avbildning. Industriella tillämpningar är främst begränsade till hinderundvikan för AGV:n och grundläggande navigation.
Teknikjämförelse och valguide
Varje teknik excellerar i specifika situationer:
Kostnads-känsliga tillämpningar: Stereovision
Ovanligt höga noggrannhetskrav: Laserlinjeprofilering
Komplex yttre skannning: STRUKTURERAT LJUS
Tidsberoende dynamisk sensing: ToF-system





