

Kallibrering av industriella 3D-kameror: Vad du behöver veta
Förståelse av 3D-kamerakalibrering i industriella applikationer
I industriell automation, robotik, kvalitetsinspektion och avancerad tillverkning är precision oumbärlig. En 3D-kamera fungerar som systemets ögon, som samlar in detaljerade rumsliga data för mätning, positionering och beslutsfattande. Oavsett hur avancerad hårdvaran är, är en 3D-kameras mätningar bara lika exakta som dess kalibrering. Industriell 3D-kamerakalibrering är en process som matematiskt justerar kamerans insamlade data med verkliga koordinater. Detta säkerställer att djupkartor, punktmoln och 3D-modeller visar faktiska mått, vinklar och positioner. Utan kalibrering kan även den mest sofistikerade kameran producera data fyllda med distortioner och fel.
Varför kalibrering är avgörande?
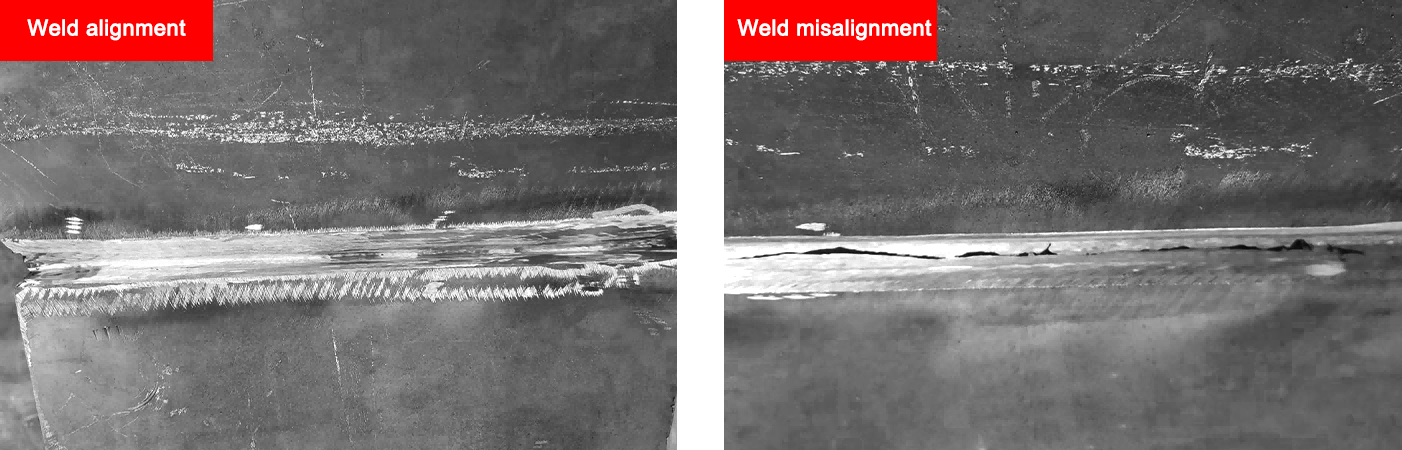
I många industriella miljöer mäts toleranser i mikron eller delar av en millimeter. En 3D-kamera som är felaktigt kalibrerad kan leda till oförmågan att exakt mäta komponenter, felaktig placering av robotarmar eller misslyckade kvalitetsinspektioner. Till exempel kan en dåligt kalibrerad kamera i automatiserad svetsning missförstå ett objekts position, vilket orsakar felriktade svetsar. Vid höghastighetsinspektion av varor på transportband kan en liten avvikelse i djupuppfattningen leda till felaktiga godkännande eller underkännande beslut. Kalibrering förbättrar inte bara precisionen utan säkerställer också repeterbarhet – kritiskt för produktion i stora volymer där konsekvens är avgörande.
Hur fungerar kalibrering av industriella 3D-kameror?
Kalibrering innebär vanligtvis att fastställa intrinsiska och extrinsiska parametrar.
- Intrinsiska parametrar omfattar brännvidden, optiska centrum och linsvridningskoefficienter. Dessa definierar hur kamerans interna optik bearbetar ljus.
- Extrinsiska parametrar beskriva kamerans position och orientering i förhållande till ett känt koordinatsystem eller kalibreringsobjekt.
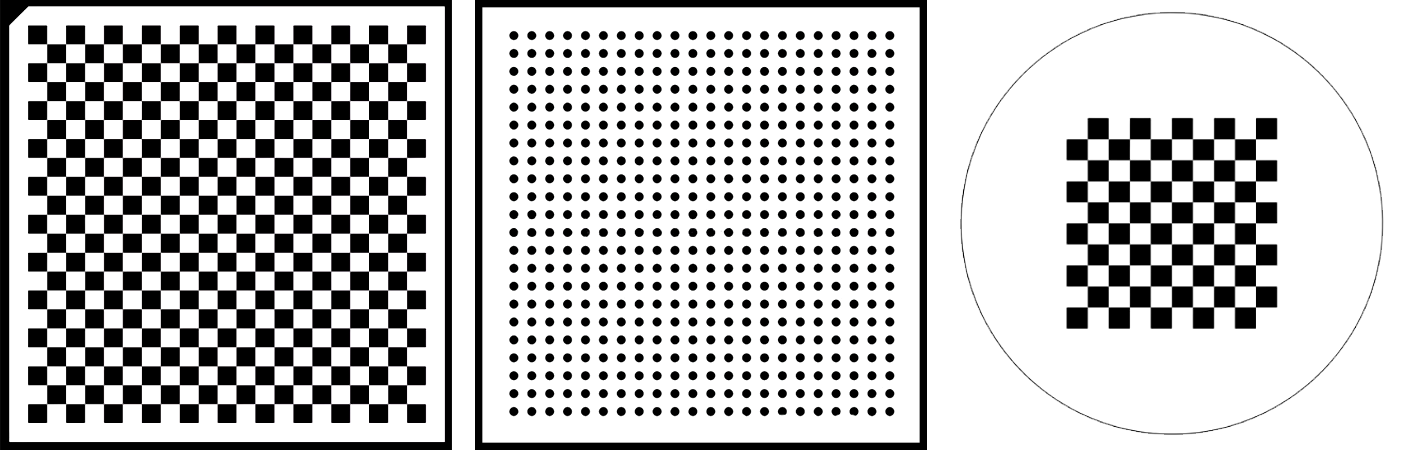
Processen använder ofta kalibreringsmål som schackbrädemönster, prickrutnät eller strukturerade ljusmönster. 3D-kameran tar upp flera bilder av målet från olika vinklar. Specialiserad programvara analyserar sedan dessa bilder för att beräkna de exakta relationerna mellan kamerans råa pixeldata och verkliga mått. Denna transformation säkerställer att varje punkt i en inspelad scen korrekt mappas till sin faktiska fysiska plats.
Vanliga kalibreringsutmaningar
Industriella miljöer medför unika kalibreringsutmaningar. Vibrationer från tunga maskiner kan förändra kamerapositionerna över tid. Temperatursvängningar kan få linsmaterial att expandera eller krympa, vilket subtilt förändrar de optiska egenskaperna. Dammet, fett och miljöföroreningar kan förhindra att kalibreringsmål syns tydligt eller störa laser- och strukturerade ljusprojektioner. Dessutom innebär kameror monterade på robotarmar ständig rörelse, vilket kräver regelbunden rekalibrering för att upprätthålla precision. För att hantera dessa utmaningar krävs ofta robusta monteringslösningar, kontrollerad belysning och regelbundna underhållsintervall.
Statisk och dynamisk kalibrering
I industriella 3D-kamerasystem kan kalibrering vara statisk eller dynamisk.
- Statisk kalibrering utförs en gång vid installation eller efter större underhåll. Kameran förblir fixerad i sin position och kalibreringen gäller tills fysiska förändringar sker.
- Dynamisk kalibrering innebär kontinuerlig eller periodisk omkalibrering under drift. Detta är vanligt i robotade system, där kamerans position förändras med varje uppgift. Automatiserade kalibreringsrutiner gör att systemet snabbt kan återjustera sig utan manuell ingripande, vilket upprätthåller precision i snabbt föränderliga miljöer.
Verktyg och tekniker för kalibrering
Kalibreringsprocessen förlitar sig på både hårdvara och mjukvara. Kalibreringsplattor med exakta geometriska mönster är avgörande för precision. Industriella stativ eller monteringshållare minskar vibrationer och rörelser under kalibreringen. När det gäller mjukvara erbjuder tillverkare ofta egna kalibreringsprogram som är anpassade till deras kameramodeller. Tredjeparts mjukvaruplattformar för maskinseende erbjuder också avancerade kalibreringsmoduler, vilket möjliggör integrering med olika märken och hårdvarukonfigurationer. Nya tekniker som AI-förbättrad kalibrering kan analysera miljöförändringar och automatiskt justera kameraparametrar i realtid, vilket ytterligare förbättrar precisionen.
Integrering av kalibrering i produktionsarbetsflöden
I moderna fabriker är kalibrering inte en engångshändelse utan en integrerad del av produktionsarbetsflödet. Till exempel kan en bilmonteringslinje schemalägga automatiska kalibreringsrutiner under planerade produktionspauser. I elektronikproduktion kan kalibreringsstationer i arbetsflödet verifiera och justera kamerornas noggrannhet mellan olika serier. Genom att integrera kalibrering i arbetsflödesautomatisering minskar företag driftstopp samtidigt som de säkerställer konsekvent kvalitetskontroll.
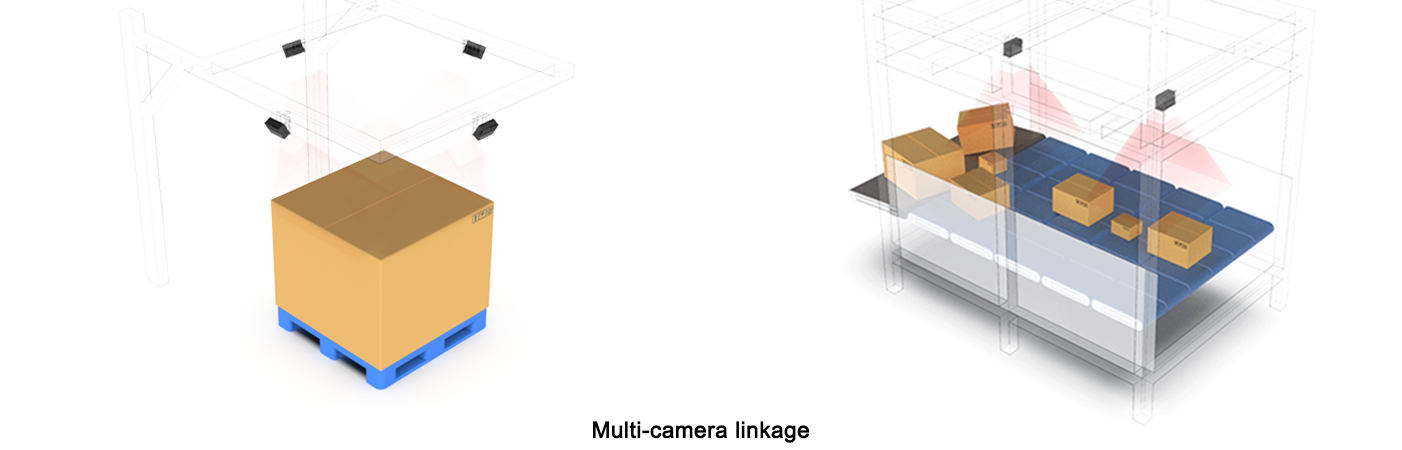
Kalibrering för flerkamera-system
Många industriella applikationer använder flera 3D-kameror för att fånga in olika vinklar eller täcka stora arbetsområden. I sådana fall krävs en kalibrering av flera kameror för att säkerställa att alla kameror delar samma koordinatsystem. Denna process, som kallas extrinsisk kalibrering mellan kameror, justerar data så att en enhetlig 3D-modell kan skapas utan felmatchningar eller överlappningar. Detta är avgörande för applikationer såsom storskalig 3D-scanning, robotstyrd greppning i containrar och automatisk navigering i lager.
Underhåll och återkalibrering – Bästa metoder
För maximal prestanda bör industriella 3D-kameror kalibreras på nytt med jämna mellanrum. Frekvensen beror på användning, miljöns stabilitet och systemets mobilitet. Miljöer med hög vibration eller hög temperatur kan kräva återkalibrering varje vecka, medan stabila, kontrollerade miljöer kanske bara behöver det kvartalsvis. Att dokumentera kalibreringsdatum, metoder och resultat hjälper till att bibehålla spårbarhet och säkerställer efterlevnad av branschstandarder, särskilt inom reglerade sektorer som flyg- och rymdindustrin, tillverkning av medicintekniska produkter och bilindustrin.
Kostnaden för att inte utföra kalibrering
Att försumma kalibrering kan få allvarliga konsekvenser. Felaktiga mätningar kan leda till defekta produkter, kostsamma återkallanden eller till och med säkerhetsrisker. Till exempel kan ett felaktigt kalibrerat 3D-visionssystem i flygindustrins tillverkning producera felaktiga komponenter, vilket äventyrar strukturell integritet. Kostnaden för driftstopp för att utföra kalibrering är minimal jämfört med förlusterna från kvalitetsfel. Företag som prioriterar kalibrering skyddar inte bara produktkvaliteten utan också sin ryktbarhet och ekonomiska resultat.
Slutsats
Industriell 3D-kamerakalibrering är grunden för exakt maskinseende. Oavsett om det gäller robotiserad montering, precisioninspektion eller storskalig skanning, beror kvaliteten på era data på hur väl era kameror är kalibrerade. Genom att förstå processen, hantera miljömässiga utmaningar och integrera kalibrering i era arbetsflöden kan ni uppnå konsekventa och högprecision resultat. När tekniken utvecklas kommer automatisk och AI-driven kalibrering ytterligare att effektivisera denna process, vilket gör det lättare för industrin att upprätthålla topprestanda utan att behöva offra driftstid.





