

Industrikamera "Fångstlägen": Trigger, synkronisering och kontinuerlig
På produktionslinjer för industriell automatisering ser man ofta maskiner som klickar bort medan de tar bilder – det är industriella kameror i arbete. Till skillnad från informell fotografering med mobiltelefon betonar dessa kameror timing, rytm och till och med "sömlös samverkan".
Idag undersöker vi: Hur tar industriella kameror egentligen bilder? Vilka vanliga insamlingslägen finns det? Och när bör respektive läge användas?
ⅰ. Hur tar industriella kameror bilder? Fyra vanliga metoder
"Att ta en bild" för en industriell kamera innebär i grunden att förvärva en bild. Denna process kan fungera i flera lägen:
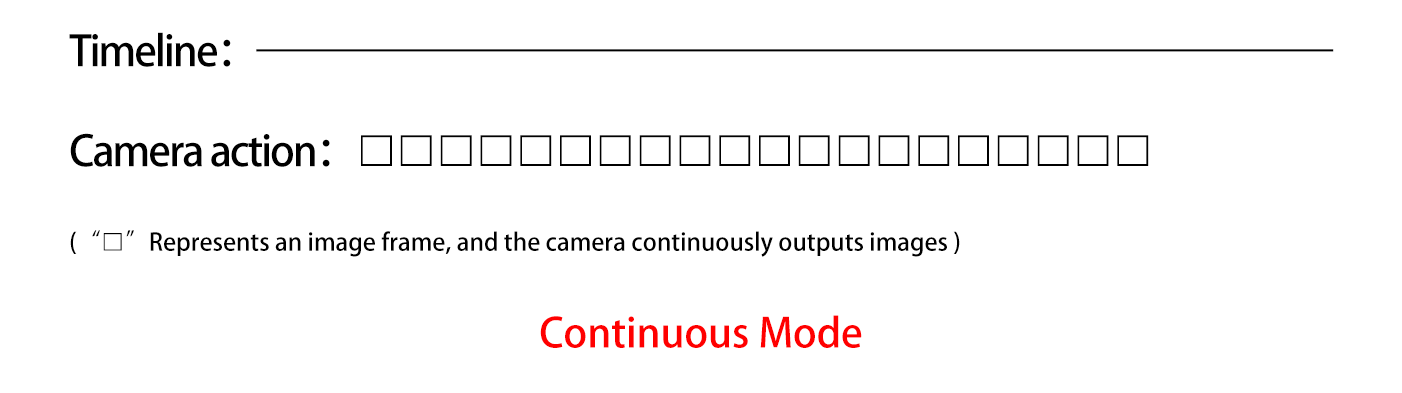
1. Kontinuerligt läge: Kameran strömmar alltid kontinuerligt
(1) Inga utlösarvillkor krävs; kameran exponerar och fångar bilder kontinuerligt på egen hand.
(2) Bildströmmen rinner oavbrutet som ett vattenfall, lämpligt för kontinuerlig övervakning.
(3) Idealiskt för: Övervakningssystem, kontroll vid fast hastighet på transportband, etc.
(4) Fördelar: Enkelt och bekvämt. Nackdelar: Genererar många bilder men saknar precision; kan inte styra exakt ögonblick för inspelning.
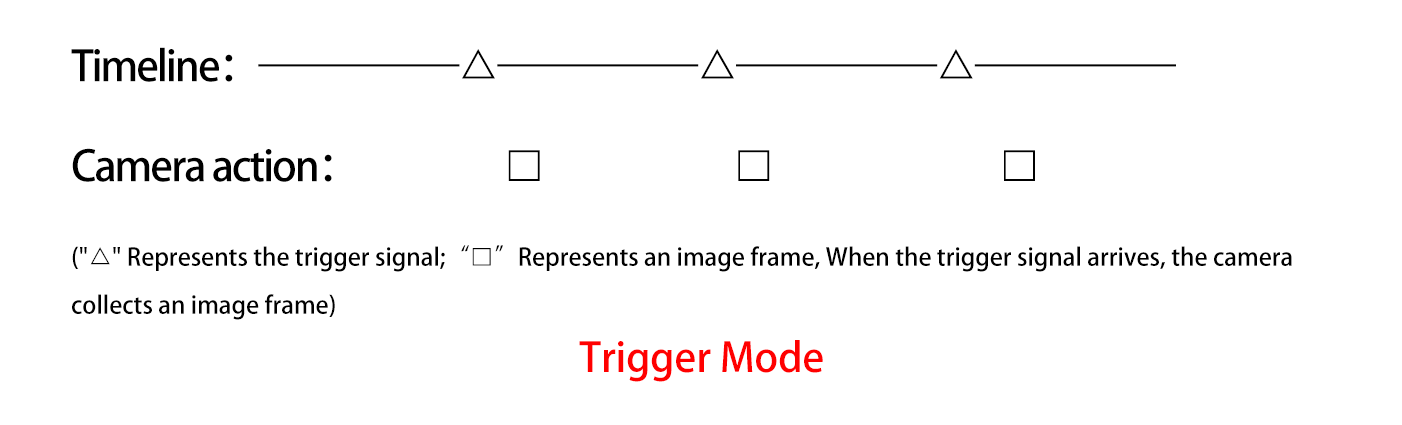
2. Utlösarläge: Den tar bara bilder när någon säger "Capture!"
(1) Kameran tar endast en bild efter att ha mottagit ett "fångstkommando".
(2) Detta kommando kan komma från programvara (skickat av en dator) eller hårdvara (t.ex. ett elektriskt signal från en PLC eller sensor).
Programvarutriggning: Värd-datorn styr kameran via kod, t.ex. anropar TriggerSoftware() för att ta en enskild bild.
Hårdvarutriggning: En extern enhet skickar ett elektriskt signal (t.ex. en stigande flank eller hög nivå), och kameran svarar omedelbart.
(3) Idealisk för: Högshastighetsinspelning, samordning med robotarmar, bildfångst i exakta ögonblick.
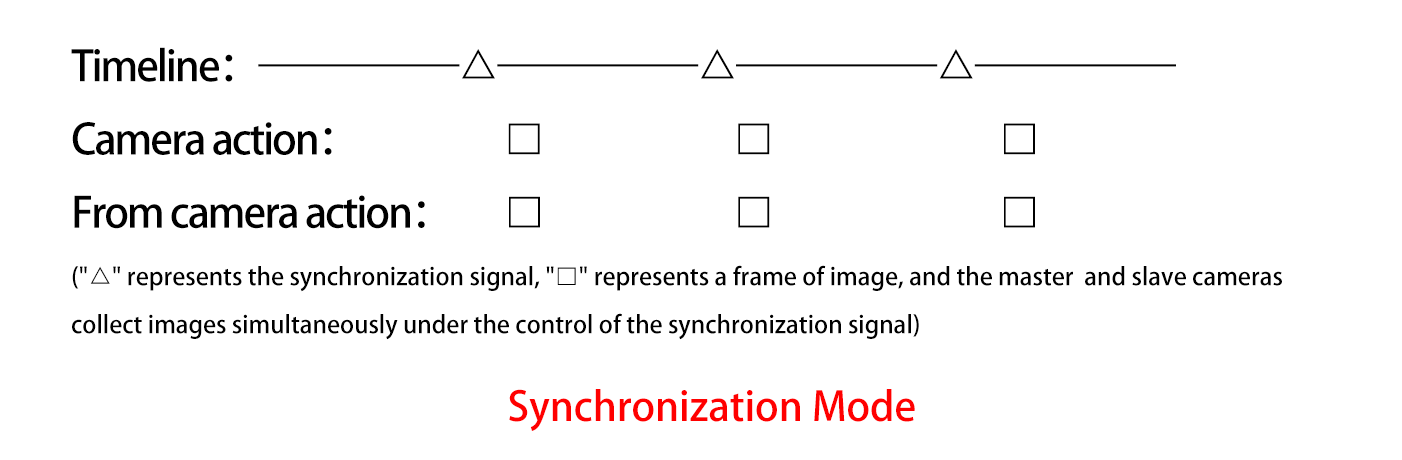
3. Synkroniseringsläge: Flera kameror tar bilder samtidigt i perfekt synk
(1) Som att ta ett gruppfoto, flera kameror tar emot ett enhetligt signal, och sedan exponerar och fångar bilderna samtidigt.
(2) Säkerställer att bilder från flera vinklar tas exakt samtidigt, utan tidsavvikelse.
(3) Idealisk för: Stereoseende, maskinella synsystem med flera kameror, etc.
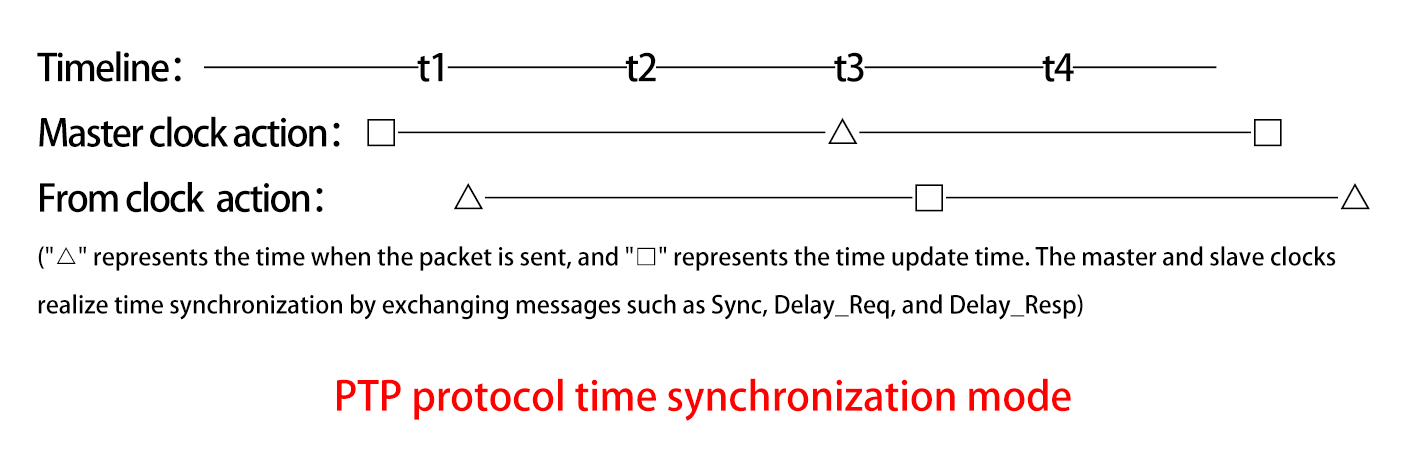
4. Tids-synkroniserat läge: Synkronisering med en "klocka"
(1) En avancerad version av synkronisering. Inte bara tar kamerorna bilder samtidigt, utan de registrerar även "exakta tidsstämplar".
(2) Använder GPS- eller PTP-klockor (Precision Time Protocol) för att sätta tidsstämpel på varje bild.
(3) Idealisk för: Avancerade tillämpningar som kräver "global tidsynkronisering", såsom undersökning av järnvägsspår, kamerasytem på långa avstånd, etc.
iI. Förhandsavgörande Var kommer utlösarsignaler ifrån?
Enkelt förklarat säger ett utlösarsignal till kameran: "Dags att ta en bild nu!"
(1) Programvarubaserad utlösare
• Kommer från ett kommando som utfärdats av datorn/värden.
• Fördelar: Enkel att använda, flexibel för felsökning.
• Nackdelar: Generellt sett långsammare svarstid jämfört med hårvarutriggers, med fördröjningar på cirka 1–5 ms.
(2) Hårvarutrigger
• Kommer från externa enheter som PLC:n, sensorer, brytare eller I/O-portar.
• Fördelar: Hög hastighet, stor stabilitet, fördröjningar kan ligga i mikrosekundsområdet, lämplig för höghastighetsapplikationer.
• Nackdelar: Kräver mer koppling och kan vara mer komplicerad att konfigurera.
ⅲ. Vilka olika former av trigger"åtgärder" finns det?
Signalen är inte bara ordet "fånga", utan kommer som en spänningsförändring. Industrikameror förstår följande typer:
|
Sätt för utlösning |
Betydelse |
|
Stigande flank |
Spänning hoppar från låg till hög (t.ex. från 0 V till 24 V) |
|
Fallande flank |
Spänningen ändras från hög till låg |
|
Båda flankerna |
Utlöses av både stigande och fallande flank |
|
Hög nivå |
Spänningen hålls kontinuerligt hög |
|
Låg nivå |
Spänningen hålls kontinuerligt låg |
ⅳ. Två utlösningssätt: Flank vs. Nivå – Vad är skillnaden?
|
Läge |
Så här förstår du det |
Lämpliga situationer |
|
Kantutlösning |
Kameran registrerar en gång när signalen ändras (kant). Därefter ignorerar den signalens tillstånd. |
Enskild bildfångst, stabil avbildning, undviker oavsiktliga återutlösningar. |
|
Nivåutlösning |
Kameran tar bilder hela tiden så länge som signalen är aktiv (nivå). |
Snabb kontinuerlig fångst, t.ex. höghastighetsproduktionslinjer. |
v. Vilket läge är mer lämpligt för olika användningsscenarier?
|
Scenarie |
Rekommenderat läge |
Anledningen |
|
Säkerhet, allmän inspektion |
Kontinuerligt läge |
Låg ansträngning, visning i realtid |
|
Labbavbuggning, tillfälligt inspelning |
Programvarutrigger |
Enkel att styra, ingen kablage behövs |
|
Inspektion på höghastighetsproduktionslinje |
Hardwaretrigger |
Hög precision, stabil prestanda |
|
Mångvinklig samordnad avbildning |
Synkronisering eller tidsmässig synk |
Samtidig insamling, noll fel |
1. Angränsande färgstrategi
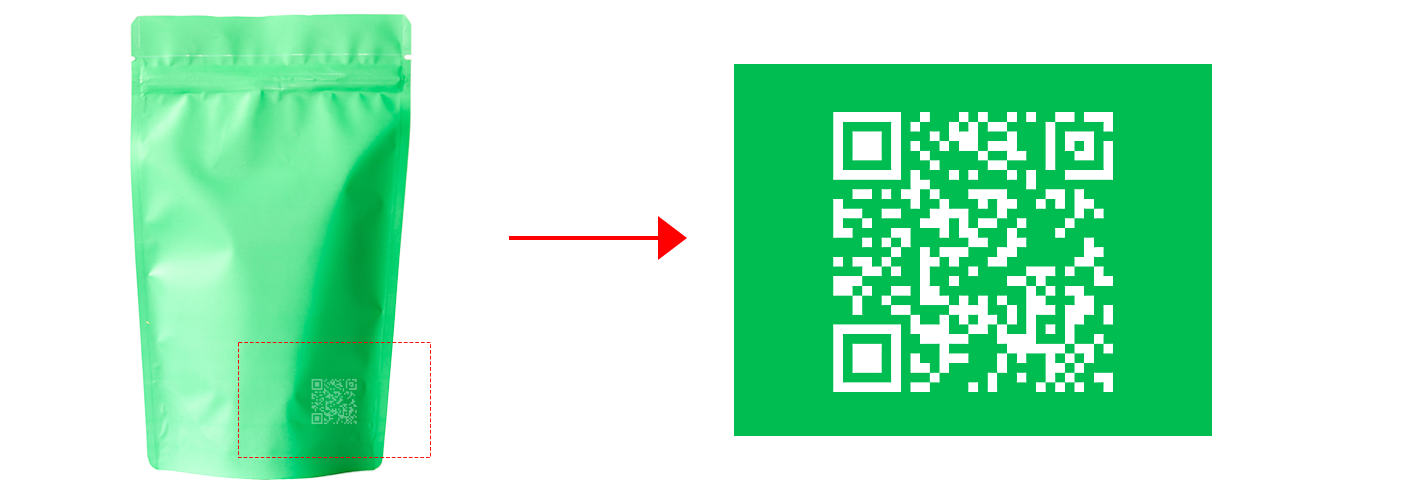
Använd en belysningsfärg som liknar målobjektet (t.ex. grön ljus för gröna delar). Detta gör målet ljusare i bilden och "neutraliserar" störande bakgrunder – t.ex. gröna mönster på gröna förpackningspåsar verkar tonade under grönt ljus, vilket undviker störningar vid vit QR-kodigenkänning .
2. Kompletterande färgstrategi
Använd en belysningsfärg mittemot målobjektet på färgcirkeln (t.ex. rött mot grönt, blått mot gult). Detta skapar stark ljusstyrkekontrast – t.ex. vita tecken på en grön bakgrund blir ljusare under rött ljus, medan bakgrunden mörknar, vilket betydligt förbättrar igenkänningsfrekvensen.
ⅵ. Sammanfattning: Den mest komplexa inspelningsmetoden är inte nödvändigtvis den bästa – den rätta är den lämpliga!
• Behöver du full täckning, men tidpunkt inte kritisk? Använd kontinuerligt läge.
• Behöver du kontrollera exakt ögonblicket och kräver precis handling? Använd utlösarläge.
• Flera kameror som arbetar tillsammans? Överväg synkronisering eller tids-synkroniserade lägen.
• För experiment eller felsökning? Programvaruutlösare är ofta tillräckligt.
• För höghastighetsproduktionslinjer? Hårdvaruutlösare är mer pålitlig.





