

Maskinvision Konturdetektering
I industrins 4.0-tid och smart automation har maskinseende blivit en kärnateknik, vilket låter maskiner "se" och tolka visuella data med precision som ofta överstiger mänskliga förmågor. Bland dess viktigaste funktioner är konturdetektering avgörande: den extraherar objektets gränslinjer från digitala bilder och utgör grunden för uppgifter som objektidentifiering, dimensionsmätning, defektinspektion och robotmanipulation.
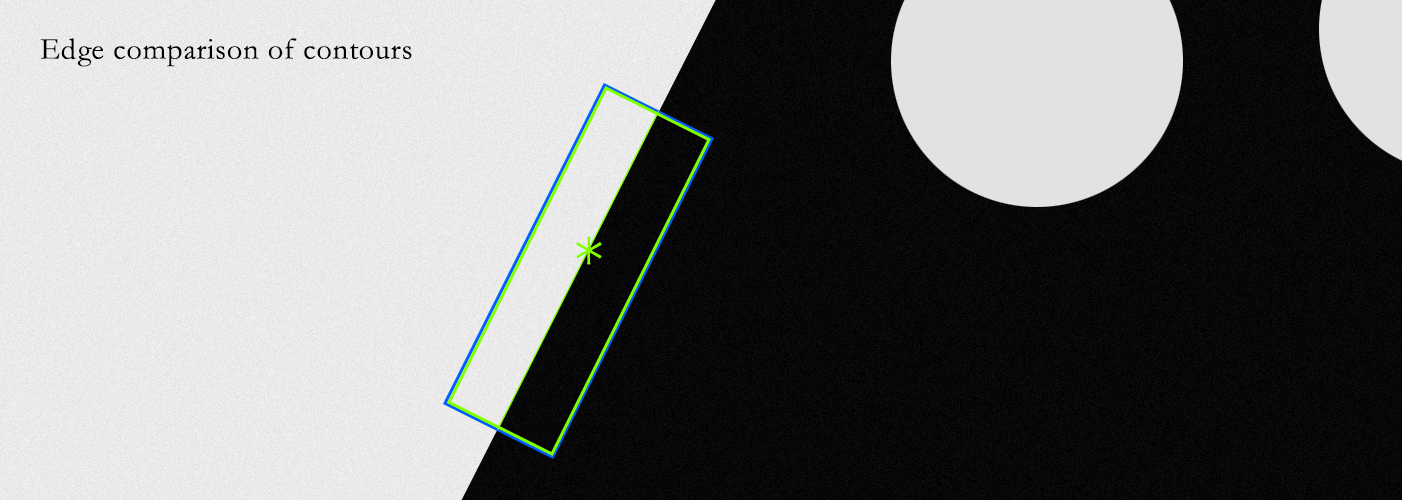
1. Vad är konturdetektering?
En "kontur" inom bildbehandling är en kurva som förbinder kontinuerliga punkter (längs en objekts gräns) med samma intensitet eller färg, och som skiljer objektet från dess bakgrund. Till skillnad från diskreta kanter (övergångar mellan ljus och mörkt på pixelnivå) är konturer kontinuerliga loopar (eller öppna kurvor för delvisa objekt) som representerar ett objekts form form, inte bara isolerade intensitetsförändringar.
Huvudmålet med konturdetektering är att förenkla bildinformation: att minska en 2D-bild till 1D-konturlinjer gör att maskiner kan analysera ett objekts geometri (storlek, vinklar, symmetri) effektivt, utan att behöva bearbeta varje pixel – en nödvändighet för tillämpningar i realtid där både hastighet och precision är viktiga.
2. Grundläggande principer
Konturdetektering bygger på två nyckelsteg: förbehandling (förbättring av kontrast mellan objekt och bakgrund) och konturhämtningsfasen (identifiering av gränspunkter). Dessa steg åtgärdar brister i råa bilder, såsom brus, ojämn belysning eller låg kontrast, som kan dölja gränser.
2.1 Förbehandling
Råa bilder har sällan tydliga gränser, varför förbehandling är avgörande:
Omvandling till gråskala : De flesta algoritmer använder enkanalsgråskalebilder (förenklar data från tre RGB-kanaler till en, eftersom färg ofta är irrelevant).
Bullerminskning : Gaussisk suddning jämnar ut bilder med en Gaussisk kärna, minskar högfrekvent brus samtidigt som stora intensitetsförändringar bevaras – avgörande för att undvika falska kanter från sensorstörningar eller ljusfluktuationer.
Kanthighet : Identifierar pixelnivåintensitetsförändringar (kanter) som bygger konturer. Den Canny Edge Detector (en flerstads metod: suddning, gradientberäkning, icke-maximum-suppression, hysteresspänningsfiltrering) är standard, och ger tunna, kontinuerliga kanter. Sobels operator, som lyfter fram horisontella/vertikala kanter, fungerar för tjocka gränser.
Tröskelvärdesberäkning : Omvandlar gråskalekantkartor till binära (svarta/vita) bilder, med främre plan (objektkanter) som 1 och bakgrund som 0 – förenklar konturidentifiering.
2.2 Konturidentifiering
Efter förbehandling spårar algoritmer sammanhängande förgrundspixlar för att bilda konturer. Den Freeman Chain Code används väldigt ofta: den representerar konturer som riktningkoder (upp, ner, vänster, höger) i förhållande till den tidigare pixeln, minskar lagring och möjliggör enkel formjämförelse. Bibliotek som OpenCV förenklar detta med funktioner som findContours(), som returnerar konturpixelkoordinater och tillåter filtrering (efter area eller bildförhållande) för att ta bort brus.

3. Avancerade tekniker
Traditionella metoder fungerar för kontrollerade, högkontrastiga miljöer, men verklighetsscenarier (o jämn belysning, överlappande objekt) kräver avancerade tillvägagångssätt:
Adaptiv tröskling : Beräknar lokala trösklar för varje pixel (jämfört med en enda global tröskel), idealisk för bilder med varierande belysning (t.ex. industriella komponenter under fabriksljus).
Detektion baserad på djupinlärning : Convolutional Neural Networks (CNN) extraherar gränser direkt från råbilder, hoppar över manuell förbehandling. Modeller som HED (Holistically-Nested Edge Detector) och RCF (Richer Convolutional Features) slå samman flerskals-CNN-funktioner för högupplösta kantkartor, utmärker sig i komplexa scener (medicinska bilder, oordnade miljöer).
4. Viktiga utmaningar
Trots framsteg kvarstår utmaningar i praktiska tillämpningar:
Brus och belysning : Fabriksmiljöer, låg belysning eller utomhusmiljöer orsakar avbrutna/falska konturer.
Överlappande/fördelade objekt : Staplade delar slår ihop konturer, vilket gör det svårt att skilja individuella former.
Transparenta/reflekterande material : Glas eller metall sprider ljus, vilket skapar svaga/förvrängda kanter.
Realtidsspelarverkan : Industriella uppgifter (inspektion på monteringslinjer) kräver 30+ bilder per sekund (FPS). Djupinlärningsmodeller kräver optimering (kvantisering, GPU-acceleration) för att möta prestandakrav.
5. Verkliga tillämpningar
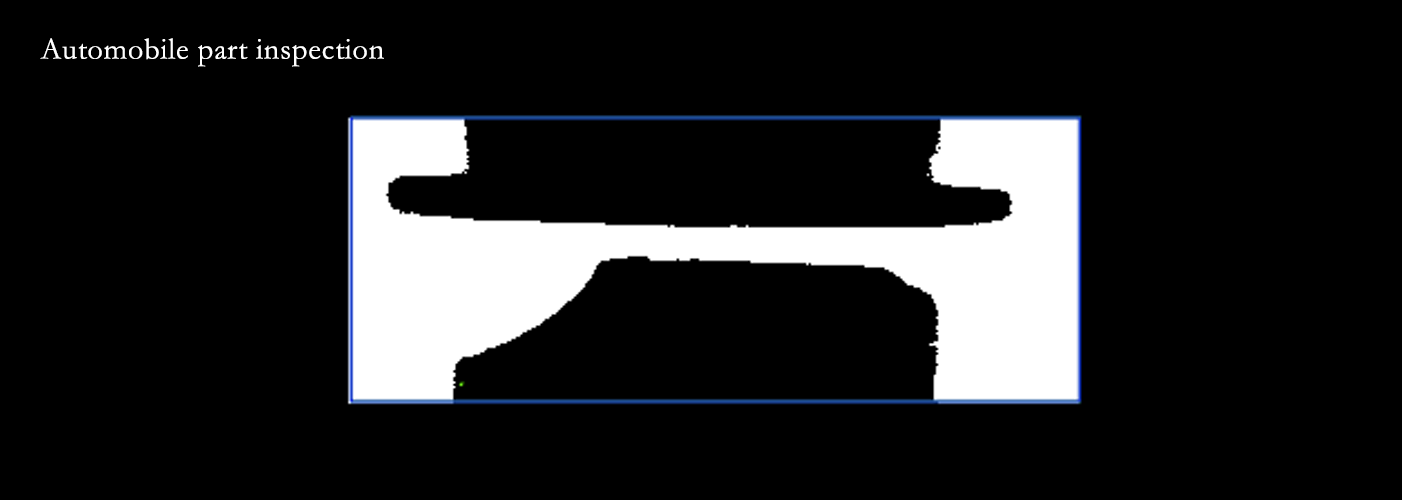
Konturdetektering driver automation över branscher:
Industriell kvalitetskontroll : Kontrollerar defekter (sprickor, bucklor) i tillverkningen. Till exempel kontrollerar bilproduktion att motorkomponenter (växlar, tätningar) matchar designens konturer och avvisar delar som ligger utanför tolerans.
Robotmanipulation : Hjälper robotar att lokalisera objekt. I lager använder robotarmar konturer för att hitta paket på transportband, beräkna centrum/orientering och justera grepp.
Medicinsk bildning : Segmenterar anatomiska strukturer (tumörer i CT-skanningar, cellegenskaper i histologiska bilder) för att underlätta diagnos. Djupinlärningsmodeller hanterar biologiska vävnader med god precision.
Jordbruk : Sorterar frukter (äpplen, apelsiner) efter storlek/mognad genom konturanalys och identifierar skördesjukdomar från förändringar i bladens konturer.
Trafikövervakning : Följer fordon, mäter trafikflöde eller identifierar olyckor (genom ovanliga konturer eller stillastående objekt) med övervakningskameror.
6. Framtida trender
Tre trender kommer att forma kantdetektering:
Edge AI-integration : Lätta modeller (kvantiserade CNN:er) på edge-enheter (industrikameror, drönare) möjliggör realtidsbehandling utan beroende av molnet – kritiskt för autonoma robotar.
Flermodig fusion : Genom att kombinera visuella data med LiDAR/värmekamera förbättras detektionen i svåra förhållanden (t.ex. värmekamera förbättrar konturer i dåligt ljus; LiDAR lägger till 3D-djup för överlappande objekt).
Förklarbar AI (XAI) : XAI-tekniker kommer att förtydliga hur djupinlärningsmodeller detekterar konturer, vilket bygger förtroende i kritiska områden (medicinsk diagnostik, flyg- och rymdteknik).
Slutsats
Kantdetektering inom maskinseende kopplar samman rå bilddata med åtgärdsbara insikter, vilket driver automation och kvalitetskontroll. Från traditionell kantdetektering till djupinlärning har den utvecklats för att hantera komplexa utmaningar. När tekniken fortskrider kommer den att förbli central för intelligenta system, vilket gör maskiner mer kapabla och tillförlitliga inom olika branscher.





