

Maskinseende inom registreringsskyltigenkänning
I takt med snabb teknikutveckling har maskinsyn blivit en kärnkomponent i intelligenta system, vilket omvandlar branscher genom att låta maskiner "se" och tolka visuella data. Bland dess tillämpningar är registreringsskyltigenkänning (LPR) en av de mest praktiska, och omvandlar inläsning av registreringsskyltar till ett verktyg som effektiviserar trafikstyrning, förbättrar säkerheten och driver utvecklingen av smarta städer.
1. Principen för maskinsyn inom registreringsskyltigenkänning
Bildinnehavning
Som grunden för LPR använder bildfångst högupplösta kameror (2–8 megapixel) och specialiserade sensorer installerade på strategiska platser (korsningar, parkeringens ingångar). Dessa enheter kalibreras för slutartid, bländare och ISO för att fånga skarpa bilder av fordon, så att registreringsskyltar kan skiljas åt för efterföljande bearbetning.

Bildförbearbetning
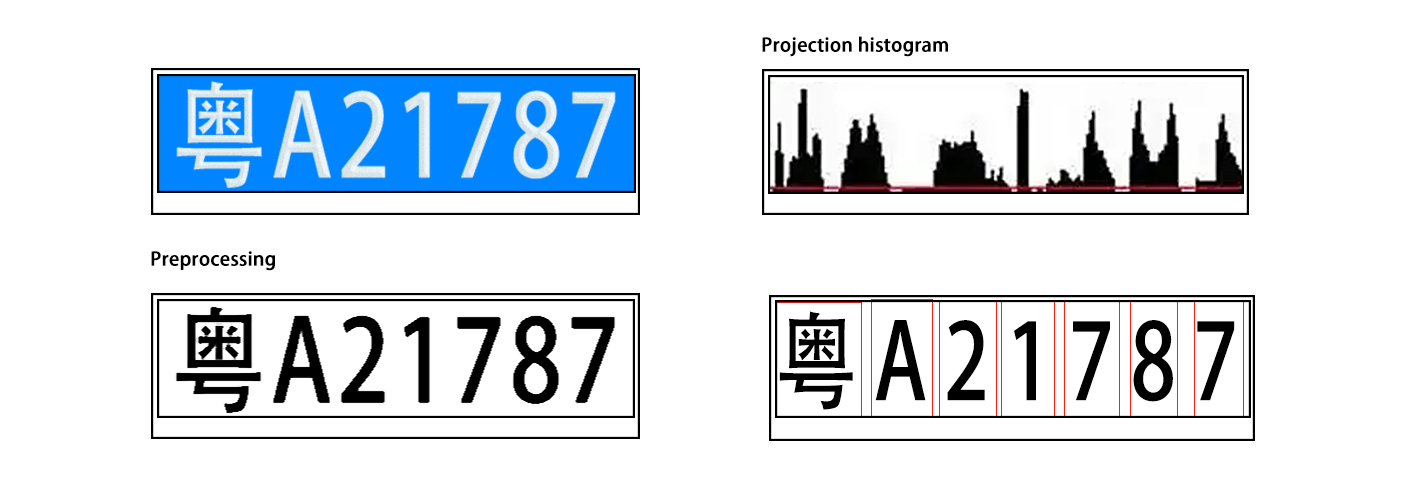
Råa fordonets bilder har ofta brus, ojämn ljusstyrka och låg kontrast. Förbehandling åtgärdar detta genom omvandling till gråskala (förenklar data samtidigt som plattans struktur bevaras), brusreduktion (Gaussisk/median-filtrering) och kontrastförbättring (histogramutjämning), vilket gör att detaljer i registreringsskylten blir mer framträdande för lokalisation.
Lokalisation av registreringsskylt
Detta steg isolerar registreringsskylten från fordonets bilder genom att använda dess unika egenskaper: form (standardrektangel med fast höjd-bredd-förhållande), färg (till exempel blå-vit för civila bilar i Kina) och struktur. Kantdetektering (Canny) och färgsegmentering arbetar tillsammans för att beskära skyltens område från irrelevanta element.
Teckenuppdelning
För att förbereda för igenkänning delar teckenuppdelning upp tecknen på skylten i separata bilder. Den använder horisontell projektion (vertikalt teckenintervall) och vertikal projektion (identifiering av mellanrum mellan tecken). Snedkorrigering tillämpas på sneda skyltar för att säkerställa korrekt separation av varje tecken.
Teckenigenkänning
Den centrala processen använder optisk teckenigenkänning (OCR, mallbaserad jämförelse) eller djupinlärning (CNN, automatisk inlärning från datamängder). Varje uppdelat tecken bearbetas, omvandlas till text och kombineras till ett komplett registreringsnummer.
2. Användning av maskinsyn inom registreringsnummerigenkänning
Trafikledning
LPR-system vid korsningar och motorvägar övervakar fordon, identifierar skyltar och matchar dem med data om trafikförseelser. De fångar upp registreringsnummer, registrerar tid och plats för överträdelsen och skickar informationen till hanteringssystem, vilket minskar manuellt arbete och förbättrar vägsäkerheten.
Parkeringsplatshantering
LPR automatiserar parkering: kameror fångar upp registreringsnummer vid ingångar (registrerar ankomsttid, öppnar bommar) och utgångar (beräknar varaktighet, genererar avgifter för kontantlösa betalningar). Detta minskar inväntningstider och eliminerar problem relaterade till biljetter.
Betalning av brottningsavgift
På motorvägar och i tunnlar möjliggör LPR obeställt biltullsinsamling. Det identifierar skyltar, kontrollerar registrering, drar avgifter automatiskt för registrerade fordon (minskar transaktionstiden till <1 sekund) och genererar fakturor för oregistrerade fordon, vilket minskar köer.

Säkerhet och övervakning
Integrerat i kameror i allmänna utrymmen scannar LPR skyltar och matchar dem mot bevakningslistor (stulna bilar, misstänkta fordon). Det varnar säkerhetspersonal vid träff, vilket möjliggör snabb åtgärd och förbättrar allmän säkerhet.
3. Fördelar med maskinseende inom registreringsskyltsidentifiering
Hög effektivitet
Maskinseende behandlar hundratals bilder per minut, med identifieringstider på 0,1–0,5 sekunder per fordon. Till skillnad från manuella operatörer bibehåller det konsekvent kapacitet, vilket sänker kostnader och förbättrar service.
Hög noggrannhet
Avancerade algoritmer och AI möjliggör över 99 % noggrannhet under ideala förhållanden och >95 % i svåra miljöer – långt högre än manuell identifiering (5 %+ felrate). Detta säkerställer tillförlitlighet vid biltullsinsamling och säkerhet.
drift runt om dagen
Utrustad med mörkerkänsliga sensorer och väderbeständiga kameror fungerar LPR utan avbrott. Infraröd/LED-belysning underlättar bildfångst på natten, och förbättringsalgoritmer minskar påverkan från väderförhållanden, vilket säkerställer oavbruten drift.
Datamanagement och analys
Identifieringsresultat (registreringsnummer, tid, plats, bilder) lagras i en centraliserad databas för snabb sökning. Data analyseras för att identifiera trender – exempelvis för att optimera trafiksignaler, justera prissättningen för parkering eller spåra misstänkta fordon.
4. Utmaningar och lösningar inom maskinseende-baserad registreringsplatteläsning
Utmanande miljöer
Extrema väderförhållanden (regn, dimma, motljus), förändringar i belysning och slitage på skyltar kan sänka noggrannheten till <80 % i allvarliga fall, vilket påverkar tillförlitligheten.

Komplexa fordons-scener
Ocklusion (täckta skyltar), vinkel/förvrängning och scenarier med flera skyltar stör identifieringen, eftersom traditionella algoritmer har svårt med icke-standardindata.
Lösningar och förbättringar
Hårdvaruptimering (HDR-kameror, infraröd belysning) och algoritmförbättringar (adaptiv bullerreduktion, dimmavlägsnande) tar itu med miljöfrågor. Skjutkorrigering, okklussionshantering och djup inlärning (regionbaserade CNN) tar itu med komplexa scener. Regelbundet underhåll och uppdateringar håller systemen exakta.
5. Framtida trender för maskinsyn vid registreringsskyltkännande
Djupt lärande och AI-integration
Avancerade modeller (transformatorer, få skott lärande) hantera svåra fall (slitna plattor). End-to-end LPR-system (single neural network for all steps) förenklar designen och AI förutsäger fordonets beteende för proaktiv förvaltning.
Multisensor Fusion
LPR kommer att integrera LiDAR (3D-fordonets data), radar (hastighet/avstånd) och termiska kameror (mörker/rök). Datafusion minskar fel, vilket gör systemen mer robusta för användning i terräng och nödfall.
Cloudbaserade tjänster
Cloudbaserad LPR erbjuder skalbarhet (lägg till kameror utan hårdvarupgraderingar), fjärrhantering och systemövergripande integration (delning av data med smarta stadsplattformar). Molnlagring stöder långsiktig analys för storskaliga applikationer.
6. Slutsats
Maskinseende är ryggraden i modern LPR, löser manuella systems problem med snabbhet, noggrannhet och drift dygnet runt. Framsteg inom djup inlärning, multisensor fusion och molnteknik övervinner utmaningar. När smarta städer växer kommer LPR att spela en nyckelroll i att ansluta fordon, infrastruktur och användare och skapa smarta transporter.





