

Produktsökningsprocessen för ett maskinvisionprojekt
Vet du vilka steg som ingår i en omfattande process för val av visionsprojekt? Idag ska vi utforska hur man väljer komponenter för ett maskinvisionprojekt.
- Få kundens krav
När vi tar emot en detekteringssample, vad ska vi göra först? Naturligtvis är det att kommunicera med kunden om deras krav, eftersom projektet bör sträva efter att uppfylla kundens behov så mycket som möjligt. Genom att förstå de specifika detekteringskraven via kommunikation kan vi göra det första valet baserat på om objektet är statiskt eller dynamiskt - det vill säga, att välja mellan global eller rullande skymningsläge för den industriella kameran. Slutligen, för att fotografera dynamiska objekt krävs en global skymningsläge.
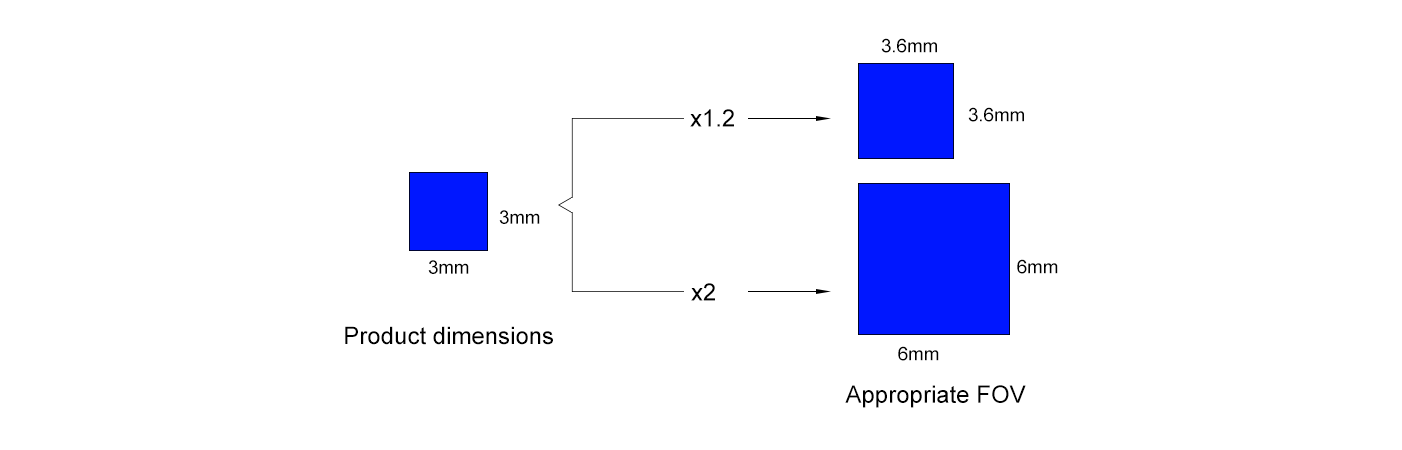
- Bestäm fält O av Syn (FOV)
Nästa steg är att avgöra den lämpliga FOV-storleken baserat på produktdimensionerna. För ett bildtag, är kamerans avbildnings-FOV vanligtvis mest lämplig om den är 1,2 till 2 gånger så stor som produkten.
- Välj Lämpligt Industriell Linser
Det är välkänt att industriella kamerolinsor inkluderar telecentriska linsar och FA (Factory Automation)-linsar, och beräkningsmetoderna för FOV varierar mellan olika typer av linsar, så vi måste analysera specifika situationer. Dock, eftersom FOV-beräkning inte kan skiljas från sensordimensionerna, måste vi först beräkna sensordimensionerna.

Sensordimensionen beräknas genom att multiplicera upplösningen med pixelsstorleken. Ta en 1,3-megapixels industriell kamera som exempel:
•Sensorbredd = 1280 × 4,8 μm = 6,144 mm
• Sensorn höjd = 1024 × 4.8 μm = 4.915 mm
För telecentriska linser beräknas FOV som sensordimension delat med linsens förstoring. Att använda samma kamera med en 0.5× telecentrisk lins:
• Avbildningsbredd = 6.144 mm ÷ 0.5 = 12.288 mm
• Avbildningshöjd = 4.915 mm ÷ 0.5 = 9.83 mm
För industriella FA-linser beräknas FOV som sensordimension × arbetsavstånd ÷ fokuslängd. Att använda samma kamera med ett arbetsavstånd på 100 mm och en fokuslängd på 8 mm:
• Horisontell bredd = 6.144 mm × 100 ÷ 8 = 76.8 mm
• Horisontell höjd = 4.915 mm × 100 ÷ 8 = 61.4 mm
Alla dessa beräkningar syftar till att välja lämpliga kameror och linser utifrån FOV och kraven på noggrannhet. Därför är nästa steg att beräkna kamerans noggrannhet.
- Beräkna Den industriella Kameran noggrannhet
För telecentriska linsar är den teoretiska noggrannheten av kameran lika med pixeldjupet dividerat med förstoringen av telecentriska linsen. Fortsättande med föregående exempel (0,5× telecentrisk lins):
• Teoretisk noggrannhet = 4,8 μm ÷ 0,5 = 9,6 μm
För industriella FA-linsar beräknas den teoretiska noggrannheten som FOV ÷ upplösning. När FOV är 72 mm:
• Teoretisk noggrannhet = 72 mm ÷ 1280 = 0,056 mm
Ovanstående är teoretiska noggrannheter, och det finns ofta en betydande skillnad mellan teori och praktik. Därför kräver faktisk noggrannhet ytterligare beräkningar. Till exempel:
Med frontbelysning är den faktiska noggrannheten 3 till 5 gånger högre än den teoretiska noggrannheten.
Med maskinvisionsbakbelysning kan den faktiska noggrannheten uppnå 1 till 2 gånger den teoretiska noggrannheten.

Högre noggrannhet kan uppnås om algoritmen kan sub-pixel interpolera.
Som vi alla vet är belysning oumbärlig för visuell inspektion - god belysning kan göra hälften av framgången i ett visuellt projekt. Därför är det nödvändigt att välja en ljuskälla av lämplig storlek för belysningsprov. Till exempel:
För maskinvisionsringljus, ytljus eller skålformade ljus är storleken på ljuskällan vanligtvis 10% till 20% större än FOV.
För maskinvision bar ljus, är ljuskällans längd vanligtvis 20% till 30% längre än FOV.
Ovanstående är den fullständiga komponentutvärderingsprocessen för ett maskinvisionprojekt. Genom att följa dessa steg kan vi snabbt avgöra de nödvändiga produkterna för projektet. Alternativt kan du lämna ett meddelande till oss, och vi kommer att hjälpa dig att välja de mest lämpliga produkterna för dina projektbehov.





