

Vilka är de vanliga matningsmetoderna inom maskinvisuell? En nödbok för nybörjare i automatisering
I världen av automatisering är maskinvision den ultimata speländraren, vilket möjliggör att system kan ”se” och fatta beslut med pinpunktsnoggrannhet. Men innan en kamera kan inspektera ett produkt, måste det presenteras korrekt – det är där “födningmetoder ”kommer in i bilden. Dessa tekniker ser till att delar eller produkter placeras perfekt för maskinvisionssystem att utföra sin magi, oavsett om det gäller att upptäcka defekter eller leda en robotarm. Från transportband till robotfödare, rätt metod kan göra eller bryta din effektivitet.
I denna post ska vi undersöka de vanligaste födningsmetoderna inom maskinvision, förklara hur de fungerar och hjälpa dig att förstå vilken som passar dina behov. Oavsett om du är ny i automatisering eller söker att optimera din produktionslinje, låt oss ta reda på de system som håller maskinvisionen gående smidigt!
Vad är födningmetoder inom maskinvision?
Födningsmetoder syftar till teknikerna som används för att leverera delar, produkter eller material till ett maskinvisionssystem för inspektion eller bearbetning. I industriella sammanhang beror maskinvisionskameror på konsekvent positionering för att fånga klara, användbara bilder. Födningsmetoder säkerställer att objekt – oavsett om det handlar om skruvar, flaskor eller kretsbrädor – är riktigt orienterade och ankommer i rätt ögonblick för att kameran ska kunna analysera dem.
Tänk på det som att ställa in bordet inför en måltid: maten (din produkt) måste placeras precis rätt för gästen (visionssystemet) att njuta av den. Låt oss titta närmare på de vanligaste metoderna som används för att göra detta möjligt.
Vanliga födningsmetoder inom maskinvision
Här är de fördelningsmetoder som drivs maskinvisionstillämpningar över flera industrier:
- Försel med band
Hur det fungerar: Produkter rör sig längs en konveyorband, passerar under en kamera i konstant hastighet. Ofta kombinerad med linjeskannkameror är denna metod ideal för kontinuerlig rörelse.
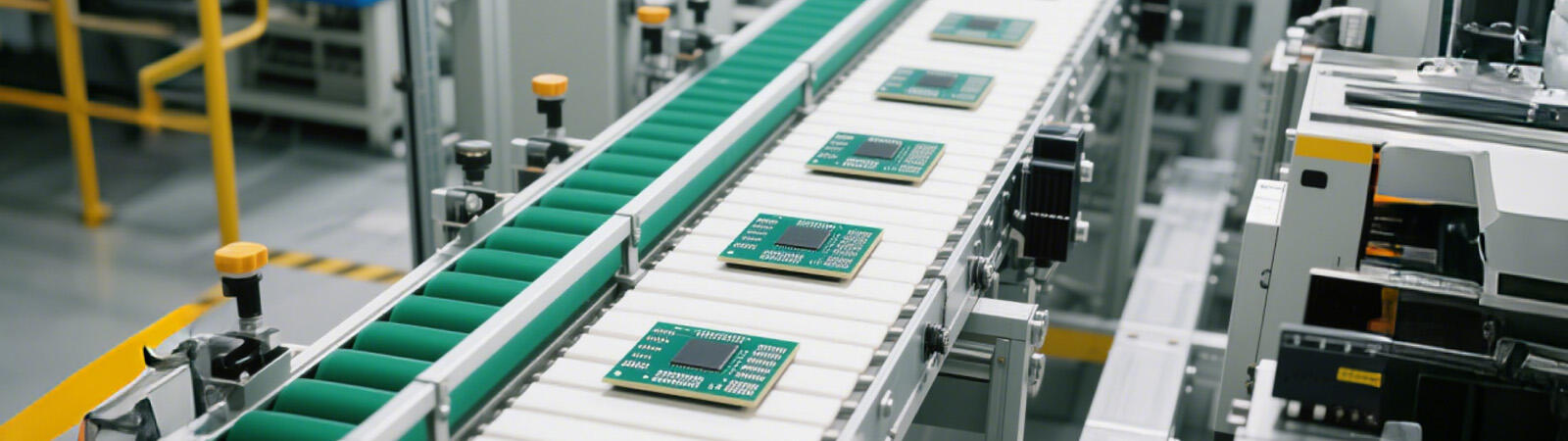
Bäst för: Högvolymeproduktion, som att kontrollera matförpackningar eller kontrollera etiketter på flaskor.
Varför det är bra: Det är enkelt, skalbart och hanterar stora mängder utan att bromsa ner. Encoderer synkroniserar bandets hastighet med kameran för smidig bildning.
Överväganden: Kräver konstant hastighet och avstånd för att undvika överlappningar eller missade objekt.
2. Vibrationsbäddsförsörjning
Hur det fungerar: Små delar – som skruvar eller lock – matas in i en vibrerande bädd som sorterar och orienterar dem med anpassade spår. Delarna lämnar systemet i en enda kö, klara för inspektion.

Bäst för: Små, lösna komponenter inom industrier som elektronik eller bilsamling.
Varför det är bra: Sorterar och justerar delar automatiskt, vilket minskar handplock. Det är också kostnadseffektivt för höghastighetsuppgifter som upprepas.
Överväganden: Kan vara bullersamt, och känsliga delar kan skadas av vibrationerna.
3. Robotbaserad plock- och placering
Hur det fungerar: En robotarm, styrd av ett visionsystem, plockar delar från en burk eller fat och placerar dem framför en kamera för inspektion. Samma arm kan flytta delen till nästa station.
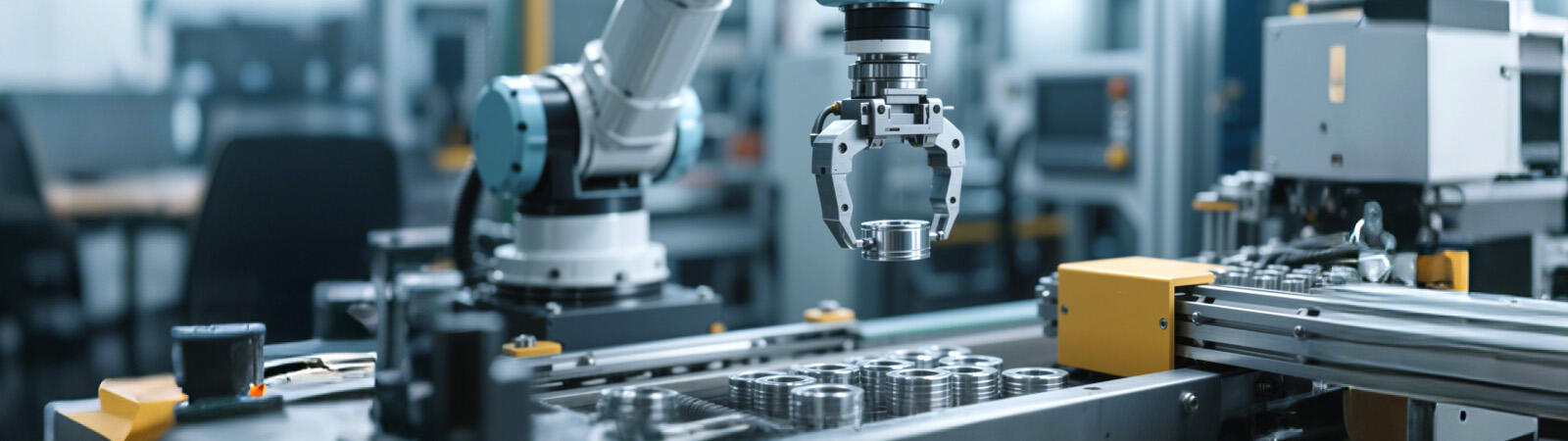
Bäst för: Komplexa eller slumpmässigt orienterade delar, som i sammansättningslinjer för konsumtionsgods.
Varför det är bra: Ger flexibilitet – robotar kan hantera olika former och storlekar. Visionstydda robotar anpassar sig till förändringar i realtid.
Överväganden: Högare startkostnad och kräver noggrann programmering för precision.
4. Gravitationsförsörjning
Hur det fungerar: Delen rutsar ner en lutad kanal eller spår, och använder gravitation för att leda dem förbi en kamera. Ofta används med enkla, likformiga föremål.

Bäst för: Lättviktiga, icke skäligliga delar som plastlock eller metallnålar.
Varför det är bra: Låg kostnad och låg underhåll, med inga rörliga delar som kan slitas ut.
Överväganden: Begränsad kontroll över hastighet eller orientering, och inte lämplig för känsliga föremål.
5. Lådmatning eller palettmatning
Hur det fungerar: Delen är förut ordnade i lådor eller paletter, vilka flyttas in på plats för en kamera (ofta en area-scan-kamera) att inspectera flera objekt samtidigt.

Bäst för: Batchkontroller, som att kontrollera lådor med medicinska enheter eller elektronik.
Varför det är bra: Effektivt för att inspectera flera delar på en gång, med konstant positionering.
Överväganden: Längre tid än kontinuerliga metoder som band, och lådorna måste omfyllas.
Välja rätt matningsmetod
Den bästa matningsmetoden beror på din tillämpning:
Behov av hastighet: Bandtransporter eller vibrationsmatare presterar utmärkt för linjer med hög produktionsförmåga.
Komplexitet hos delar: Robotisk plock- och placering hanterar oregelbundna eller varierade objekt.
Budget: Gravitationsförsörjning eller fatssystem är kostnadseffektiva för enklare uppgifter.
Känslighet :Undvik vibrationsförsörjare för känsliga delar; välj istället robotisk eller fatssförsörjning.
Volym: Högvolymeproduktion tenderar mot konveyorband, medan batchprocesser passar fätsystem.
Att testa olika metoder med dina specifika delar kan hjälpa dig att hitta den perfekta lösningen.
Varför Matningsmetoder Är Viktiga
En väl vald matningsmetod gör inte bara att saker fortskrider – den förändrar din operation:
Förbättrar Effektiviteten: Rätt delpresentation minskar antalet fel och om-scanningar.
Garanterar noggrannhet: Konstant positionering leder till pålitliga inspektioner.
Sparar tid: Snabbare matning innebär högre produktionsgenomströmning utan att kvaliteten försämras.
Minskar Kostnader: Färre klemningar eller felaktiga matningar betyder mindre stannade tider och avfall.
Med andra ord är den rätta matningsmetoden den okände hjälten som låter maskinvision stråla.
Verklighetsbaserade exempel
Livsmedelsindustri: Förarlband leder burkar förbi kameror för att kontrollera på bucklor med hastigheten 1 000 enheter per minut.
Elektronik: Vibrationsfat justerar små skruvar för kretsbrädessamling, vilket säkerställer perfekt placering.
Fordon: Robotarmar tar och placerar motorkomponenter för defektkontroll, anpassade till varierande former.
Varje metod anpassas till uppgiften, vilket visar att det inte finns någon enstor-lekar-passar-alla i maskinvision.
Tips för att optimera ditt matningssystem
Synkronisera med kameror: Använd encoder eller sensorer för att tidsmäta delankomst med kamerautlösare.
Testa belysning: Se till att din belysningsinstallation kompletterar matningsmetoden för klara bilder.
Minimera problem: Utforma matningsenheter för att hantera dina delars storlek och form utan att de blockeras.
Arbeta med experter: Konsultera maskinvision leverantörer för att matcha matningsmetoder till din linje.
Framtiden för matning inom maskinvision
Medan automatiseringen utvecklas blir matningsmetoder smartare. AI-drivna robotar kan nu anpassa sig till slumpmässiga delorienteringar, medan avancerade sensorer justerar bandhastigheter i realtid. Resultatet? Ännu snabbare och mer flexibla system som klara av morgondagens krav.
Klar att optimera din maskinvision?
Rätt matningsmetod kan låsa upp det fulla potentialen i ditt maskinvisionssystem, vilket förstärker effektiviteten och noggrannheten. Vill du hitta den perfekta lösningen för din linje? Utforska vår utbud av maskinvisionslösningar eller kontakta våra experter för en skräddarsydd konsultation. Låt inte ineffektiv matning försena dig – kontakta oss idag och håll ditt visionssystem på sin bästa nivå!





