

Varför är det svårt för maskinvision att uppnå högprecisionsmässig dimensionsinspektion?
I den snabbt utvecklade landskapet av industriell automatisering och kvalitetskontroll har maskinvision dykt upp som ett kraftfullt verktyg för olika inspektionsuppgifter. Trots dess många fördelar är uppnåendet av högprecisionsmässiga dimensionsmätningar via maskinvision fortfarande en betydande utmaning. Denna artikel går in på de viktigaste anledningarna till varför det är svårt att få exakta dimensionsmätningar med hjälp av maskinvision.
Hårdvarurelaterade begränsningar
Hårdvarukomponenterna i ett maskinvisionssystem, inklusive kameror och linser, pålägger inherenta begränsningar för precisionen. Kameror med lägre upplösning kan inte fånga upp fina detaljer av objekt, vilket leder till felaktiga dimensioneringsberäkningar. Även med högupplösta kameror är pixelformatet en avgörande faktor. Mindre pixlar kan teoretiskt ge mer detaljerade bilder, men de minskar också mängden av capture per pixel, vilket ökar bildbrus. Detta brus kan förvränga objektens kanter, vilket gör det svårt att precis definiera deras gränser.
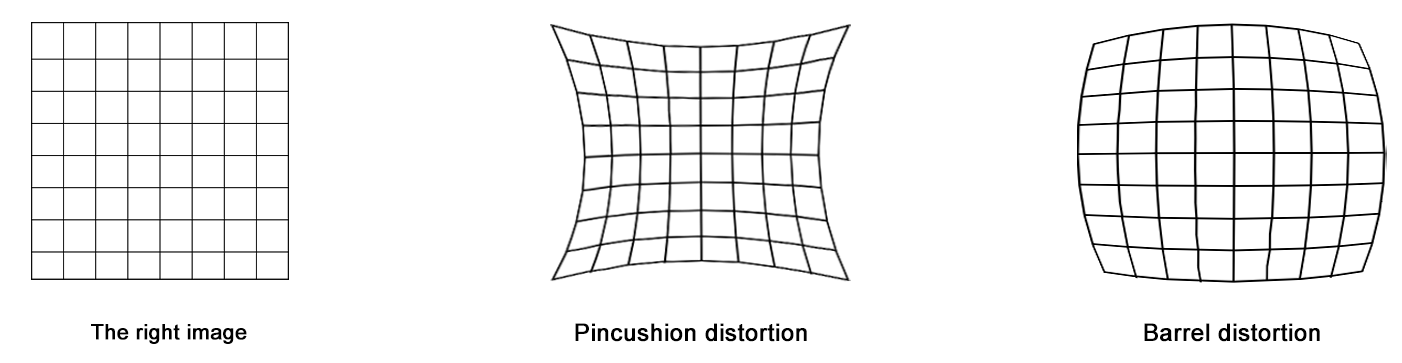
Industriella linsar spelar också en avgörande roll för noggrannheten i maskinvision. Geometriska distortioner, såsom fattpunkts- och kuddeformning, är vanliga i linsar. Dessa distortioner gör att raka linjer i den verkliga världen ser krökta ut i de upptagna bilderna, vilket kan påverka noggrannheten av dimensionsmätningar betydligt. Dessutom kan linsar lidera under kromatisk aberration, där olika våglängder av ljus fokuseras på olika punkter, vilket resulterar i färgkanting runt objekten och ytterligare försämra mätnoggrannheten. Att korrigera dessa linsbrister kräver komplexa kalibreringsförfaranden, och att uppnå perfekt korrektion över hela synfältet är extremt svårt.
Fysiska begränsningar hos optiken
De fysiska principerna för optiken ställer fundamentala hinder i vägen för högprecisionstolkning av dimensioner inom maskinvision. Ljusdiffraction är ett stort problem. Enligt lagarna om optik diffregerar ljuset när det passerar genom små öppningar eller runt små objekt, vilket orsakar att kantarna på objektets bild blir sudda. Vid kontroll av små komponenter kan denna diffractionsverkan göra det omöjligt att korrekt skilja mellan närliggande egenskaper, vilket leder till fel i dimensionsmätning.
En annan optisk begränsning är den begränsade djupförmågan. Inom maskinvision, om objektet har komplexa tre-dimensionella former eller om det finns variationer i objektets position relativt kameran, kan delar av objektet vara utom fokus. Denna utom-fokus-blur kan förvränga objektets utseende och göra det svårare att mäta dimensionerna precis. Att justera djupförmågan innebär ofta kompromisser; att öka djupförmågan kan minska upplösningen, medan att öka upplösningen kan smalna ner djupförmågan.

Miljöstörningar
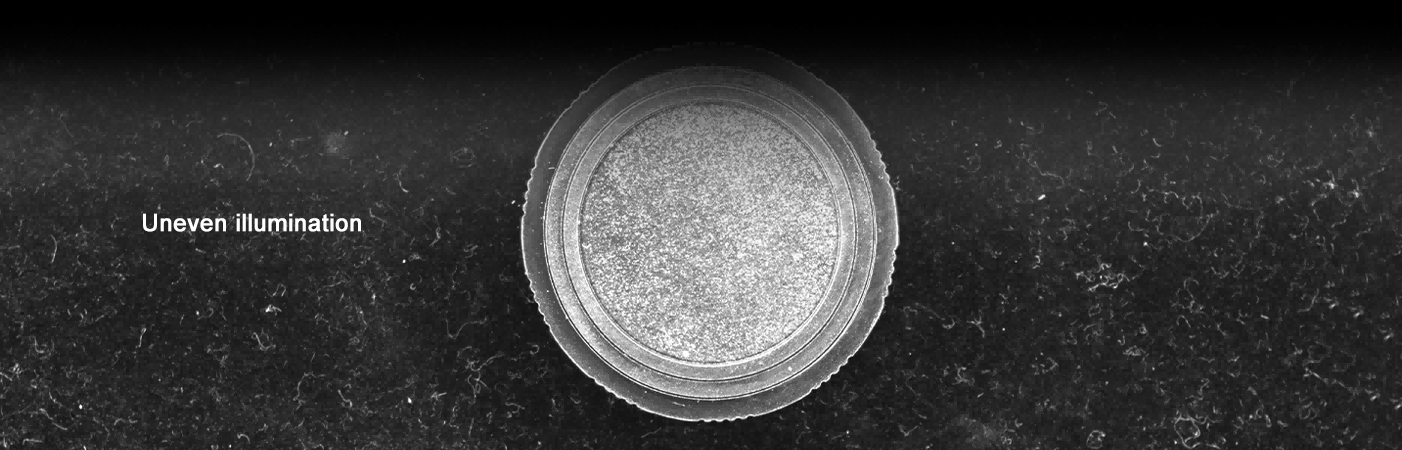
Miljön där maskinvisionssystem fungerar kan ha en djupgående påverkan på noggrannheten i dimensionsinspektion. Belysningsförhållanden är högst variabler och kritiska. Förändringar i upplysningens intensitet, riktning och färgtemperatur kan förändra utseendet på objekt i bilder. Till exempel kan ojämna belysning skapa skuggor på objektet, vilket kan tolkas felaktigt som en del av objektets form, vilket leder till felaktiga dimensionsberäkningar. Speglande ytor på objektet kan också orsaka bländning, vilket kan satura kamerans sensor och dölja viktiga funktioner.
Ambient temperatur och fuktighet kan också påverka prestandan hos maskinvisionssystem. Temperaturförändringar kan orsaka termisk utvidgning eller kontraktion av både det objekt som inspekteras och den hårdvarukomponent som ingår i visionsystemet, vilket leder till dimensionsförändringar. Fuktighet kan orsaka kondensation på linsar eller andra optiska komponenter, vilket försämrrar bildkvaliteten och mätningens noggrannhet.
Objekts jämnhet - Inducerade utmaningar
Jämnheten av ett objekt är en ofta övergången men signifikant faktor som hindrar noggrannheten i dimensionsinspektion baserad på maskinvision. När ett objekts yta är ojämn blir interaktionen mellan ljus och objekt okontrollerbar. I områden med upphöjningar eller gropar avviker ljusreflektionen från det förväntade mönstret. Istället för att spegla ljus i en konstant riktning mot kameran, skattar ojämna ytor ljuset, vilket skapar ljusa fläckar och skuggor som inte motsvarar objektets verkliga geometri. Dessa inkonsekventa ljusmönster kan leda bort kantdetekteringsalgoritmer, vilket orsakar att de felaktigt identifierar objektets gränser. Till exempel kan en liten utstickning på annars jämn yta tas mistecknat för en distinkt funktion, vilket resulterar i förstörda dimensionsmätningar.
Dessutom, i 3D-maskinvisionssystem som bygger på tekniker som strukturerad ljusprojektion eller stereojustering, stör en ojämn yta de grundläggande processerna för djupuppfattning. Med strukturerat ljus blir de projektade mönstren förvridna på en irreguljär yta, vilket gör det utmanande att noggrant avkoda djupinformationen. I stereovision kan variationerna i yttjällden leda till fel vid matchning av motsvarande punkter mellan de två kameravyer, eftersom irregulariteterna skapar skillnader som inte speglar de verkliga avstånden. Som resultat blir återgivningen av objektets 3D-form med hög precision en svår uppgift, vilket direkt påverkar noggrannheten av dimensionsinspektionen.
Algoritmiska och programvaru begränsningar
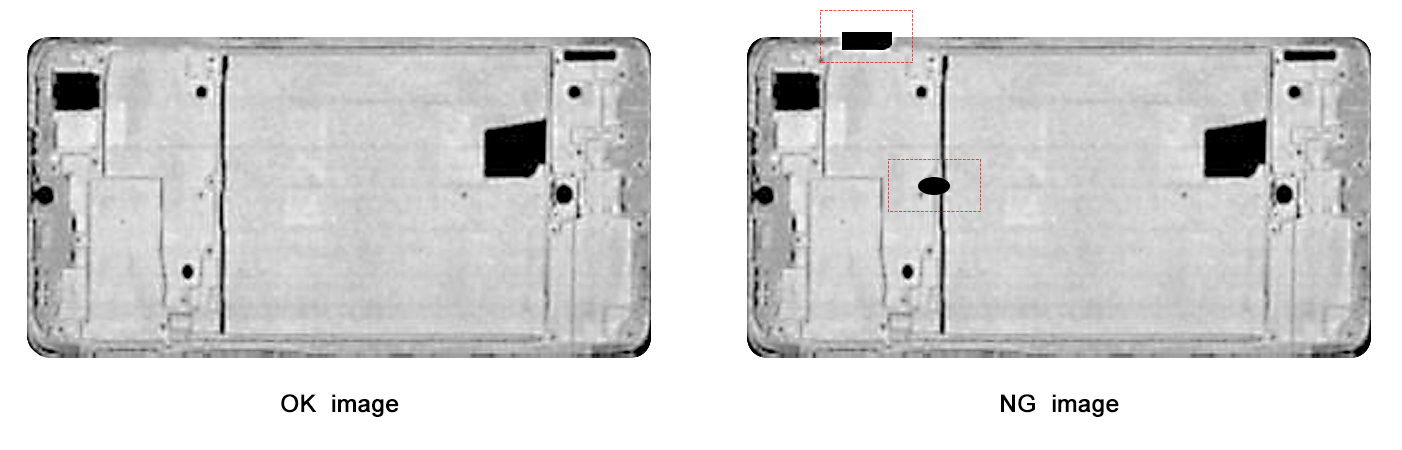
Algoritmerna och programvaran som används i maskinvision för dimensionsinspektion har sina egna utmaningar. Kantdetektering, ett grundläggande steg för att bestämma objektens dimensioner, är ofta komplext och felaktigt. Olika kantdetekteringsalgoritmer, såsom Canny, Sobel eller Laplacian, har sina egna styrkor och svagheter. Brus i bilden kan orsaka att felaktiga kanter upptäcks, medans lågkontrastobjekt kan resultera i missade kanter.
Desutom är det en svår uppgift att korrekt anpassa geometriska modeller till de upptäckta kanterna för att beräkna dimensioner. Objekt kan ha oregelbundna former, ytvillkor eller variationer i textur, vilket kan förvirra algoritmerna. Dessutom kräver hantering av objekt med komplexa tre-dimensionella geometrier avancerade 3D-rekonstruktionsalgoritmer, vilka är beräkningsmässigt kostsamma och ofta saknar nödvändig noggrannhet.
Sammanfattningsvis beror svårigheten att uppnå högprecis dimensionellt mätning med maskinvision på en kombination av hårdvarubegränsningar, optiska hinder, miljöpåverkan, problem relaterade till objektets jämnhet och algoritmiska och programvaruutmaningar. Att övervinna dessa hinder kräver kontinuerlig forskning och utveckling inom flera områden, inklusive optik, elektronik, datavetenskap och materialvetenskap. Genom att hantera dessa frågor kan vi förbättra noggrannheten och pålitligheten hos maskinvisionssystem för dimensionsmätning, vilket gör dem möjligen att uppfylla de allt striktrare kraven inom modern industriell tillämpning.





