

Bir Makine Görsel Projesinin Ürün Seçimi Süreci
Bir kapsamlı görsel proje seçim sürecinde neler yapılması gerekir biliyor musunuz? Bugün, bir makine görseli projesi için bileşenleri nasıl seçeceğimizi inceleyeceğiz.
- Müşteri Gereksinimlerini Alın
Bir tespit örneği aldığımızda, önce ne yapmalıyız? Tabii ki, projenin müşteri gereksinimlerini karşılamaya çalışması gerektiğinden, müşterilerle gereksinimler hakkında iletişim kurmalıyız. İletişim aracılığıyla belirlenen spesifik tespit gereksinimlerini anlayarak, nesnenin statik veya dinamik olup olmadığına göre ilk tercihi yapabiliriz - yani endüstriyel kameranın küresel ya da kaydırmalı şatırını (shutter) seçmek. Nihayetinde, hareketli nesneleri çekmek için küresel bir şatır gereklidir.
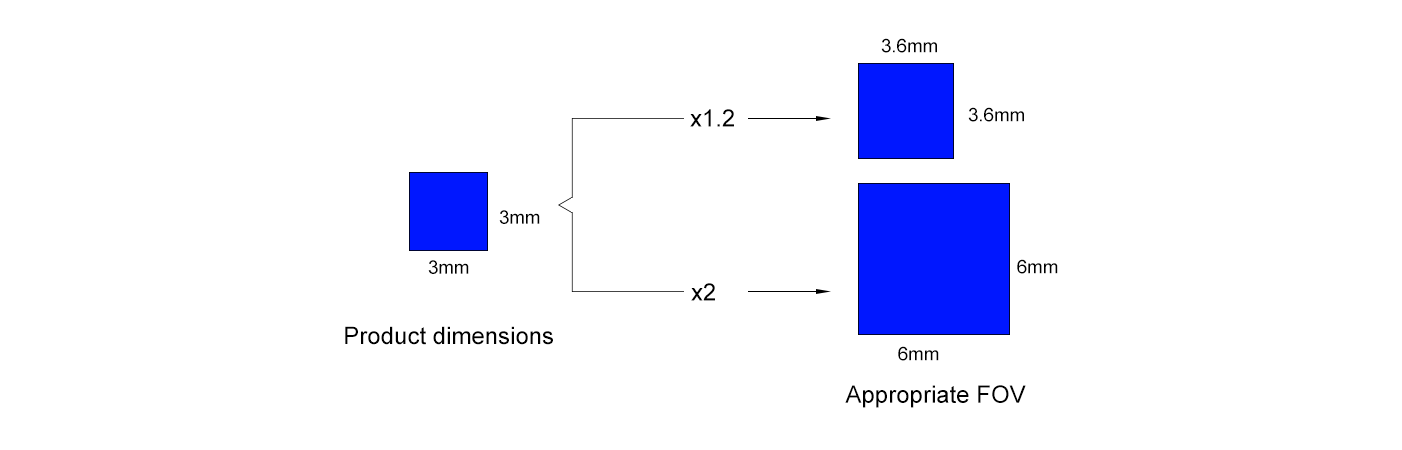
- Görüş Alanını Belirleyin O f Görünüm (FOV)
Daha sonra, ürün boyutlarına göre uygun FOV boyutunu belirlememiz gerekiyor. Bir görüntü için, kameranın imaging FOV'yu genellikle ürünün boyutunun 1.2 ila 2 katı kadar en uygun durumdadır.
- Uygun Seç Endüstriyel Lensler
İş bilinen bir gerçektir ki, endüstriyel kamera mercekleri telemerkezli mercekler ve FA (Fabrika Otomasyonu) merceklerini içerir ve farklı mercekler için FOV hesaplama yöntemleri değişir, bu nedenle belirli durumları analiz etmemiz gerekir. Ancak, FOV hesaplamasının sensör boyutundan bağımsız olamayacağından, önce sensör boyutlarını hesaplamalıyız.

Sensör boyutu, çözünürlüğü piksel boyutuyla çarparak hesaplanır. Örneğin, bir 1.3 megapiksel endüstriyel kamerayı ele alalım:
•Sensör genişliği = 1280 × 4.8 μm = 6.144 mm
• Sensör yüksekliği = 1024 × 4.8 μm = 4.915 mm
Telemer mercekleri için, FOV sensör boyutu bölü mercek büyütmesi olarak hesaplanır. Aynı kamera ile 0.5× telemer mercek kullanılarak:
• Görüntüleme genişliği = 6.144 mm ÷ 0.5 = 12.288 mm
• Görüntüleme yüksekliği = 4.915 mm ÷ 0.5 = 9.83 mm
Sanayi FA mercekleri için, FOV hesabı sensör boyutu × çalışma mesafesi ÷ odak uzunluğu şeklindedir. Aynı kamera ile 100 mm çalışma mesafesi ve 8 mm odak uzunluğu kullanılarak:
• Yatay genişlik = 6.144 mm × 100 ÷ 8 = 76.8 mm
• Yatay yükseklik = 4.915 mm × 100 ÷ 8 = 61.4 mm
Tüm bu hesaplamalar, FOV ve gereken hassasiyete göre uygun kameralar ve mercekler seçmek amacıyla yapılmaktadır. Bu nedenle, bir sonraki adım kamera hassasiyetini hesaplamaktır.
- Hesapla Endüstriyel Kamera Hassasiyeti
Telemerkezli mercekler için, kameranın teorik doğruluğu piksel boyutuna telemerkezli mercek yakınlaşma oranı bölünen eşittir. Önceki örneği devam ettirerek (0.5× telemerkezli mercek):
• Teorik doğruluk = 4.8 μm ÷ 0.5 = 9.6 μm
Endüstriyel FA mercekleri için, teorik doğruluk FOV bölü çözünürlük olarak hesaplanır. FOV 72 mm olduğunda:
• Teorik doğruluk = 72 mm ÷ 1280 = 0.056 mm
Yukarıdakiler teorik doğruluklardır ve teori ile uygulama arasında genellikle önemli bir fark vardır. Bu nedenle, gerçek doğruluk daha fazla hesaplama gerektirir. Örneğin:
Ön ışıkla, gerçek hassasiyet teorik hassasiyetin 3 ila 5 katıdır.
Makine görsel geri aydınlatma ile, gerçek hassasiyet teorik hassasiyetin 1 ila 2 katına ulaşabilir.

Eğer algoritma alt-piksel enterpolasyonu yapabilirse daha yüksek hassasiyet elde edilebilir.
Hepimiz bildiği gibi, görsel denetim için ışık kaçınılmazdır - iyi bir ışık, görsel bir projenin yarısını başarıya ulaştırabilir. Bu nedenle, aydınlatma testleri için uygun boyuttaki bir ışık kaynağı seçmek gerekir. Örneğin:
Makine görseli için halka ışıkları, yüzey ışıkları veya kase ışıkları, ışık kaynağı boyutunun genellikle FOV'den (görüntü alanından) %10 ila %20 daha büyük olması gerekir.
Makine görseli için çubuk ışık kaynaklarının uzunluğu, genellikle FOV'dan (%20-%30) daha uzundur.
Yukarıdaki bilgiler bir makine görsel projesi için tam bileşen seçimi sürecidir. Bu adımları takip ederek projemizde kullanacağımız ürünleri hızlıca belirleyebiliriz. Ya da bize mesaj bırakabilir ve size proje ihtiyaçlarınız doğrultusunda en uygun ürünleri öneririz.





