

Hướng dẫn sử dụng camera ở cấp độ bo mạch cho hệ thống thị giác nhúng
Dành cho các nhà sản xuất thiết bị gốc (OEM), các nhà tích hợp hệ thống và các đội kỹ thuật thị giác nhúng, camera ở cấp độ bo mạch là khối xây dựng nền tảng cho các hệ thống thị giác nhúng nhỏ gọn, đáng tin cậy và hiệu năng cao. Hướng dẫn toàn diện này phân tích chi tiết các tiêu chí lựa chọn then chốt, các giao thức giao tiếp, yêu cầu về hệ sinh thái phần mềm cũng như các thực hành tốt nhất về tích hợp vật lý đối với camera ở cấp độ bo mạch, nhằm hỗ trợ đội kỹ thuật của bạn tối ưu hóa thiết kế thị giác nhúng cho các ứng dụng công nghiệp, y tế, ô tô và cơ sở hạ tầng thông minh.
Các tiêu chí lựa chọn then chốt đối với camera ở cấp độ bo mạch
Cân bằng hiệu năng cảm biến với các ràng buộc về điện năng và nhiệt
Chọn camera ở cấp độ bo mạch yêu cầu tối ưu hóa khả năng của cảm biến trong giới hạn ngân sách công suất và giới hạn nhiệt. Các cảm biến độ phân giải cao (ví dụ: 12MP trở lên) tiêu thụ nhiều hơn 30–50% công suất so với các cảm biến tương đương ở mức 2–5MP, đồng thời sinh nhiệt làm suy giảm độ tin cậy trong các thiết kế không dùng quạt làm mát. Các hệ thống thị giác công nghiệp được triển khai trong không gian chật hẹp sẽ hưởng lợi nhiều nhất từ các cảm biến ít nhiễu, tiêu thụ dưới 1W và duy trì tỷ số tín hiệu trên nhiễu (SNR) lớn hơn 40dB. Kỹ sư nên xác thực hiệu năng nhiệt bằng hình ảnh hồng ngoại trong giai đoạn chế tạo mẫu—nhiệt độ duy trì trên 85°C sẽ làm tốc độ lão hóa cảm biến tăng gấp 4 lần (Tạp chí Hệ thống Nhúng, 2023).

Phù hợp độ phân giải, tốc độ khung hình và dải động với nhu cầu ứng dụng
Việc căn chỉnh chính xác thông số kỹ thuật của camera theo yêu cầu vận hành sẽ ngăn ngừa tình trạng thiết kế dư thừa và làm tăng chi phí. Hãy xem xét các cặp thông số then chốt sau:
| Ứng dụng | Thông số kỹ thuật tối ưu | Lý Do |
|---|---|---|
| Robot gắp và đặt | 5MP @ 60 khung hình/giây, dải động 120 dB | Cân bằng giữa tốc độ nhận diện chi tiết và điều kiện chiếu sáng thay đổi trong kho hàng |
| Nội soi y tế | 1080p @ 30 khung hình/giây, dải động >75 dB | Giảm thiểu hiện tượng mờ chuyển động trong các khoang thiếu sáng đồng thời giảm băng thông dữ liệu |
| Giám Sát Giao Thông | 4K @ 24 khung hình/giây, WDR (140 dB) | Chụp biển số xe vào lúc bình minh/bình hoàng mà không xuất hiện hiện tượng méo hình do chuyển động |
Các chế độ dải động cao (HDR) là yếu tố thiết yếu trong môi trường có ánh sáng thay đổi liên tục, dù chúng làm tăng độ trễ xử lý thêm 15–20 ms. Việc lựa chọn tốc độ khung hình phải phản ánh vận tốc của đối tượng: kiểm tra băng chuyền di chuyển với tốc độ 2 m/giây yêu cầu tốc độ khung hình ≥120 khung hình/giây để giới hạn độ mờ chuyển động dưới 0,5 pixel.
Giao thức giao diện nhằm tích hợp camera cấp bo mạch một cách đáng tin cậy
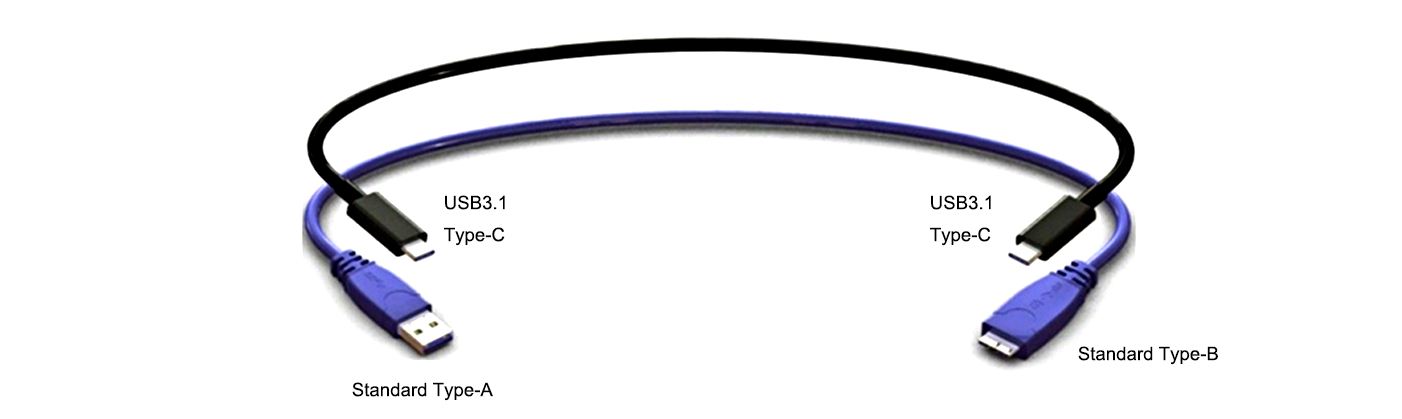
USB 3.1, MIPI CSI-2 và LVDS: Băng thông, độ trễ và mức độ phù hợp trong thực tế
Việc lựa chọn giao thức giao diện tối ưu cho camera cấp bo mạch đòi hỏi phải cân bằng giữa băng thông, độ trễ và các ràng buộc về môi trường. USB 3.1 cung cấp tốc độ truyền dữ liệu 5 Gbps cùng tính năng cắm và chạy (plug-and-play) đơn giản—phù hợp lý tưởng cho các ứng dụng hình ảnh y tế hoặc máy kiosk, nơi chiều dài cáp không vượt quá 3 mét. MIPI CSI-2 mang lại khả năng mở rộng băng thông (lên đến 6 Gbps thông qua 4 kênh) và tiêu thụ điện năng cực thấp, khiến nó trở thành tiêu chuẩn mặc định cho các hệ thống di động và nhúng dựa trên nền tảng ARM. LVDS cung cấp khả năng miễn nhiễm nhiễu vượt trội trong các môi trường có nhiễu điện mạnh như tự động hóa nhà máy, dù băng thông dưới 1 Gbps của nó giới hạn việc sử dụng cho các ứng dụng độ phân giải cao. Đối với robot thời gian thực, độ trễ dưới 5 ms của MIPI CSI-2 vượt trội hơn so với khoảng độ trễ 10–20 ms của USB 3.1. Hãy ưu tiên lựa chọn giao thức dựa trên nhu cầu triển khai: USB 3.1 cho việc tạo mẫu nhanh, MIPI cho các thiết bị biên hạn chế về năng lượng, và LVDS cho máy móc công nghiệp.
Hệ sinh thái phần mềm và hỗ trợ SDK cho camera cấp bo mạch
SDK đa nền tảng (Spinnaker, Aravis) và khả năng tương thích với RTOS trên nền tảng ARM/x86
Các bộ công cụ phát triển phần mềm (SDK) mạnh mẽ là yếu tố không thể thiếu nhằm đẩy nhanh việc triển khai hệ thống thị giác máy với các camera ở cấp độ bo mạch. Các giải pháp đa nền tảng như Spinnaker và Aravis cung cấp các giao diện tiêu chuẩn hóa, giúp che giấu sự phức tạp của phần cứng, từ đó đảm bảo khả năng di chuyển mã nguồn giữa môi trường phát triển và môi trường sản xuất. Spinnaker hỗ trợ nhiều kiến trúc khác nhau — bao gồm x86, ARM và các hệ điều hành thời gian thực (RTOS) — thông qua các API thống nhất, cho phép kỹ sư xây dựng mẫu thử nghiệm trên máy tính để bàn và triển khai liền mạch lên các nền tảng nhúng. Trong khi đó, các khuôn khổ mã nguồn mở như Aravis cung cấp khả năng tuân thủ GenICam độc lập với nhà cung cấp dành riêng cho các hệ thống dựa trên Linux. Sự linh hoạt về kiến trúc này giúp giảm 40% các rào cản tích hợp, theo kết quả các nghiên cứu về việc áp dụng thị giác nhúng (2023). Các yếu tố cần cân nhắc then chốt bao gồm khả năng tương thích với RTOS nhằm đảm bảo độ trễ xác định trong điều khiển công nghiệp, hỗ trợ đa kiến trúc để bảo vệ đầu tư trước các thay đổi phần cứng trong tương lai, cũng như các lớp trừu tượng hóa giúp đơn giản hóa quá trình phát triển driver. Khả năng tương thích với các môi trường RTOS nhẹ giúp đảm bảo hoạt động đáng tin cậy trong các ứng dụng hạn chế tài nguyên như robot di động tự hành hoặc thiết bị y tế, nơi yêu cầu thực thi liên tục là bắt buộc.
Tích hợp vật lý: Yếu tố hình dạng, cách gắn ống kính và độ bền môi trường
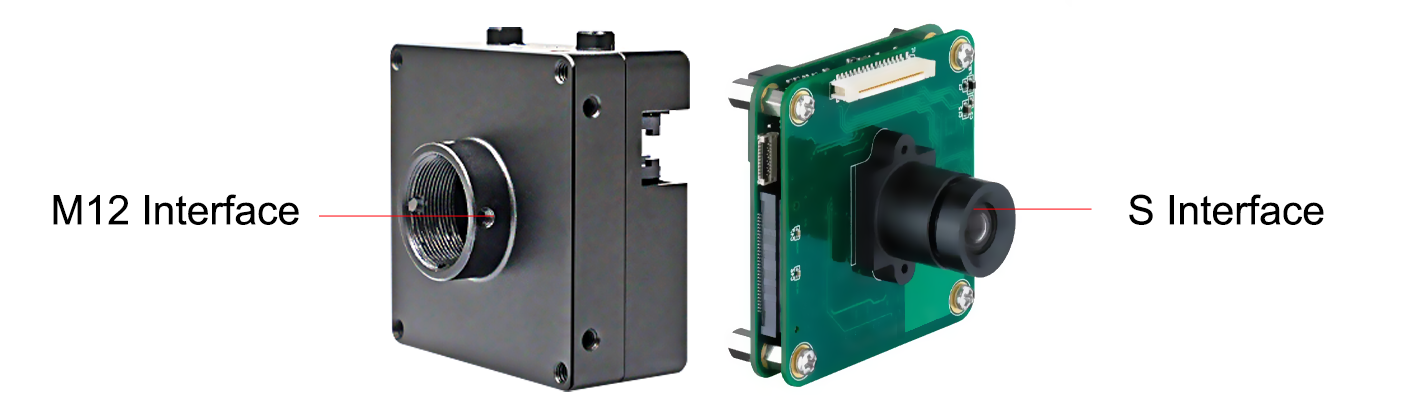
Giao diện gắn ống kính M12, S-Mount và giao diện tùy chỉnh — Góc nhìn (FOV) và tính linh hoạt quang học
Các giao diện gắn ống kính ảnh hưởng trực tiếp đến hiệu năng quang học trong các hệ thống thị giác nhúng. Các giao diện gắn chuẩn M12 mang lại khả năng điều chỉnh góc nhìn (FOV) chi phí thấp cho các ứng dụng công nghiệp, trong khi giao diện S-Mount cung cấp giải pháp nhỏ gọn dành cho các thiết kế bị giới hạn về không gian. Các giao diện tùy chỉnh cho phép đáp ứng các yêu cầu FOV chuyên biệt như góc siêu rộng hoặc cấu hình telecentric. Các yếu tố quang học then chốt bao gồm:
- Kiểm soát biến dạng : Độ méo dạng hình trụ <0,1% đảm bảo độ chính xác trong đo lường
- Độ ổn định cơ học : Cơ chế khóa ngăn ngừa hiện tượng trôi tiêu điểm khi chịu rung động 15G
- Độ nhạy NIR : Hỗ trợ bước sóng 850 nm nâng cao hiệu năng trong điều kiện ánh sáng yếu
- Tăng cường Khả năng Chịu Môi trường : Gioăng đạt chuẩn IP67 bảo vệ chống xâm nhập của bụi bẩn và hạt rắn
Thiết kế tản nhiệt và tuân thủ quy chuẩn EMC trong các triển khai không vỏ bọc và không quạt
Quản lý nhiệt trở nên cực kỳ quan trọng khi vận hành các camera cấp bo mạch trong môi trường không có quạt với nhiệt độ vượt quá 60°C. Các chiến lược hiệu quả bao gồm: các bộ tản nhiệt bằng đồng có khả năng tản tải nhiệt trên 5W, các vật liệu giao diện ổn định về mặt nhiệt giúp duy trì độ nguyên vẹn của cảm biến trong dải nhiệt từ –40°C đến 85°C, và tối ưu hóa bố trí mạch in (PCB) nhằm cách ly các thành phần sinh nhiệt khỏi cảm biến hình ảnh. Khả năng tương thích điện từ (EMC) đảm bảo hoạt động đáng tin cậy trong các môi trường công nghiệp có nhiễu điện cao. Việc tuân thủ yêu cầu phải đáp ứng các tiêu chuẩn then chốt sau:
| Yêu cầu | Tiêu chuẩn | Ứng dụng quan trọng |
|---|---|---|
| Phát xạ bức xạ | FCC Phần 15 Lớp B | Chẩn đoán y tế |
| Khả năng miễn dịch | IEC 61000-4-3 | Lắp ráp ô tô |
| Bảo vệ ESD | IEC 61000-4-2 | Công nghiệp chế biến thực phẩm |
Việc nối đất đúng cách và sử dụng vỏ bọc được bọc chắn giúp giảm 40% nguy cơ nhiễu trong các triển khai không dùng vỏ bọc (Tạp chí EMC, 2023).
Sẵn sàng tối ưu hóa Hệ thống thị giác nhúng của bạn với một camera cấp bo mạch tùy chỉnh?
Máy ảnh cấp bo mạch là lõi cốt lõi của các hệ thống thị giác nhúng đáng tin cậy, nhỏ gọn và hiệu năng cao—không có giải pháp thương mại nào có thể sánh được với mức độ tùy chỉnh, hiệu suất sử dụng năng lượng và tính linh hoạt tích hợp của một thiết kế máy ảnh cấp bo mạch được tối ưu riêng cho nhà sản xuất thiết bị gốc (OEM). Bằng cách đồng bộ hóa hiệu năng cảm biến, giao thức giao tiếp, hỗ trợ phần mềm và yếu tố hình dạng vật lý với các yêu cầu ứng dụng đặc thù của bạn, bạn sẽ rút ngắn thời gian đưa sản phẩm ra thị trường, giảm chi phí vật tư (BOM) và đảm bảo độ tin cậy ổn định trong suốt vòng đời dài, ngay cả trong những môi trường nhúng khắc nghiệt nhất.

Đối với các giải pháp camera ở cấp bo mạch dành cho công nghiệp, được thiết kế riêng cho ứng dụng thị giác nhúng OEM của bạn, hoặc để xây dựng một hệ thống thị giác tích hợp đầy đủ cùng các ống kính bổ sung, hệ thống chiếu sáng và công cụ xử lý cạnh (như HIFLY cung cấp), hãy hợp tác với nhà cung cấp có nền tảng vững chắc trong lĩnh vực thị giác máy công nghiệp và chuyên về tùy chỉnh theo yêu cầu OEM. Kinh nghiệm 15 năm của HIFLY bao quát toàn bộ quy trình thiết kế camera ở cấp bo mạch, sản xuất tùy chỉnh hoàn toàn theo mô hình OEM/ODM, cũng như tích hợp hệ thống thị giác nhúng từ đầu đến cuối—được đảm bảo bởi chứng nhận ISO 9001:2015, hỗ trợ tuân thủ các quy định pháp lý toàn cầu và dịch vụ kỹ thuật hỗ trợ thiết kế chuyên biệt. Liên hệ với chúng tôi ngay hôm nay để được tư vấn miễn phí, chế tạo mẫu thử tùy chỉnh hoặc thiết kế một camera ở cấp bo mạch tối ưu hóa cho dự án thị giác nhúng của bạn.





