

Một máy chủ có thể hỗ trợ bao nhiêu camera công nghiệp trong một hệ thống thị giác?
Trong các hệ thống thị giác hiện đại, việc xác định số lượng camera mà một máy chủ duy nhất (ví dụ: máy tính hoặc máy chủ) có thể hỗ trợ là một câu hỏi quan trọng đối với thiết kế hệ thống, khả năng mở rộng và tối ưu hóa chi phí. Câu trả lời phụ thuộc vào nhiều yếu tố liên quan đến nhau, bao gồm khả năng phần cứng, hiệu quả của phần mềm, thông số kỹ thuật của camera công nghiệp và yêu cầu ứng dụng. Bài viết này khám phá các biến số chính này và cung cấp khung làm cơ sở để ước tính khả năng hỗ trợ camera trong một hệ thống thị giác.
1. Các thành phần phần cứng và tác động của chúng
Phần cứng của máy chủ là nền tảng cho việc hỗ trợ camera, với hai khía cạnh chính đóng vai trò quan trọng.
1.1 Đơn vị xử lý: CPU và GPU
Bộ xử lý CPU thực hiện nhiều nhiệm vụ xử lý hình ảnh, từ lọc cơ bản đến suy luận học máy phức tạp. Camera độ phân giải cao hoặc tốc độ khung hình cao tạo ra khối lượng dữ liệu lớn, gây áp lực lên CPU. CPU đa lõi, như Intel i9 hoặc AMD Threadripper, có thể phân phối các tác vụ qua các lõi để xử lý song song. Mặt khác, GPU cách mạng hóa hệ thống thị giác bằng cách tăng tốc tính toán song song, đặc biệt quan trọng cho các tác vụ như thị giác 3D và học sâu trong lái tự động. Camera tích hợp với đường ống tối ưu GPU, chẳng hạn như CUDA trong GPU NVIDIA, giảm tải xử lý từ CPU, có tiềm năng tăng gấp ba số camera được hỗ trợ.
1.2 Bộ nhớ, Lưu trữ và Đầu vào/Đầu ra
RAM đủ là điều cần thiết để đệm luồng video và dữ liệu đã xử lý. Một camera 4K ở tốc độ 30 FPS tạo ra khoảng 300 MB/s dữ liệu chưa nén, làm tăng nhu cầu về bộ nhớ trong các cấu hình đa camera. Đối với camera độ phân giải cao, hãy phân bổ ít nhất 4–8 GB RAM cho mỗi camera. Bộ lưu trữ tốc độ cao như NVMe SSD và các giao diện I/O mạnh mẽ như USB 3.2 và PCIe là rất quan trọng cho việc thu nhận và lưu trữ dữ liệu. Các giao diện cũ có thể hạn chế nghiêm trọng khả năng mở rộng của hệ thống.
2. Công nghiệp Thông số kỹ thuật Camera
Các thông số của camera công nghiệp ảnh hưởng trực tiếp đến tải trọng của hệ thống máy chủ, chủ yếu thông qua hai yếu tố quan trọng sau.
2.1 Độ phân giải và Tốc độ khung hình
Độ phân giải và tốc độ khung hình cao hơn có nghĩa là nhiều dữ liệu hơn cần xử lý. Một camera 4K tạo ra bốn lần số pixel so với camera 1080p, làm tăng đáng kể nhu cầu xử lý. Tương tự, một camera 120 FPS tạo ra bốn lần lượng dữ liệu so với camera 30 FPS. Trong truyền hình thể thao, các camera độ phân giải cao và tốc độ khung hình cao được sử dụng nhưng đặt gánh nặng cực lớn lên hệ thống chủ, yêu cầu phần cứng mạnh mẽ để tránh mất chất lượng.
2.2 Nén và Giao diện
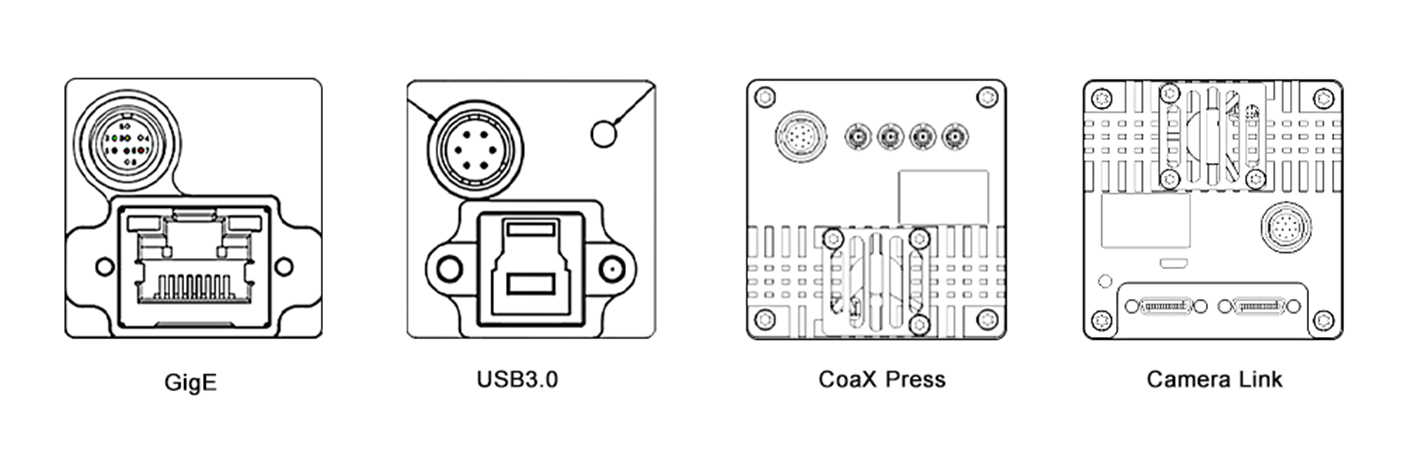
Việc chọn định dạng nén ảnh hưởng đến kích thước dữ liệu và chi phí xử lý. Các định dạng nén như H.264 giảm băng thông nhưng cần giải mã trên hệ thống chủ. Các định dạng không nén cung cấp độ trung thực cao hơn nhưng tiêu tốn nhiều tài nguyên hơn. Ngoài ra, loại giao diện camera rất quan trọng. Các giao diện tốc độ cao như GigE Vision và CoaXPress cho phép chuyển dữ liệu hiệu quả trong các cấu hình đa camera, trong khi các giao diện cũ như USB 2.0 hạn chế khả năng mở rộng do băng thông giới hạn.
3. Phần mềm và Đường ống Xử lý
Hiệu quả của phần mềm cũng quan trọng ngang bằng, với hai lĩnh vực này là chìa khóa cho hiệu suất hệ thống.
3.1 Hệ điều hành và Công cụ Phần mềm
Hệ điều hành và các trình điều khiển của nó tạo thành nền tảng phần mềm. Hệ điều hành thời gian thực (RTOS) giảm thiểu độ trễ, lý tưởng cho các ứng dụng như điều khiển robot. Các hệ thống dựa trên Linux được ưa chuộng nhờ sự hỗ trợ mã nguồn mở. Các trình điều khiển tối ưu hóa tăng cường hiệu suất phần cứng. Phần mềm thị giác và thư viện, chẳng hạn như OpenCV, MATLAB và các khung làm việc học sâu như TensorFlow và PyTorch, khác nhau về hiệu quả tính toán. Ví dụ, một máy chủ chạy mô hình YOLO được tăng tốc bởi GPU có thể hỗ trợ ít camera hơn so với một máy sử dụng phát hiện cạnh cơ bản do mức độ phức tạp cao hơn.

3.2 Đa luồng và Tối ưu hóa
Việc sử dụng đa luồng và song song hóa hiệu quả là chìa khóa để tối ưu hóa hiệu suất hệ thống. Đa luồng cho phép các tác vụ chạy đồng thời trên các lõi CPU, trong khi song song hóa tận dụng GPU cho việc xử lý dữ liệu. Các công nghệ như OpenMP và CUDA cung cấp khung làm việc cho việc triển khai. Trong một hệ thống giám sát nhiều camera, OpenMP có thể phân phối việc xử lý tín hiệu camera qua các lõi CPU, và CUDA có thể tăng tốc phân tích hình ảnh trên GPU, cho phép xử lý được nhiều camera hơn.
4. Yêu cầu Ứng dụng
Mức độ phức tạp của nhiệm vụ thị giác quyết định việc phân bổ tài nguyên, với thời gian thực và độ phức tạp trong xử lý là những yếu tố chính.
4.1 Xử lý Thời gian Thực so với Xử lý Offline
Các ứng dụng thời gian thực, chẳng hạn như lái xe tự động và tự động hóa công nghiệp, yêu cầu xử lý ngay lập tức với độ trễ thấp, giới hạn số lượng camera mà máy chủ có thể hỗ trợ. Xử lý offline, như phân tích video theo mẻ, có thể xử lý được nhiều camera hơn nhưng có kết quả bị chậm.
4.2 Độ Phức tạp trong Xử lý
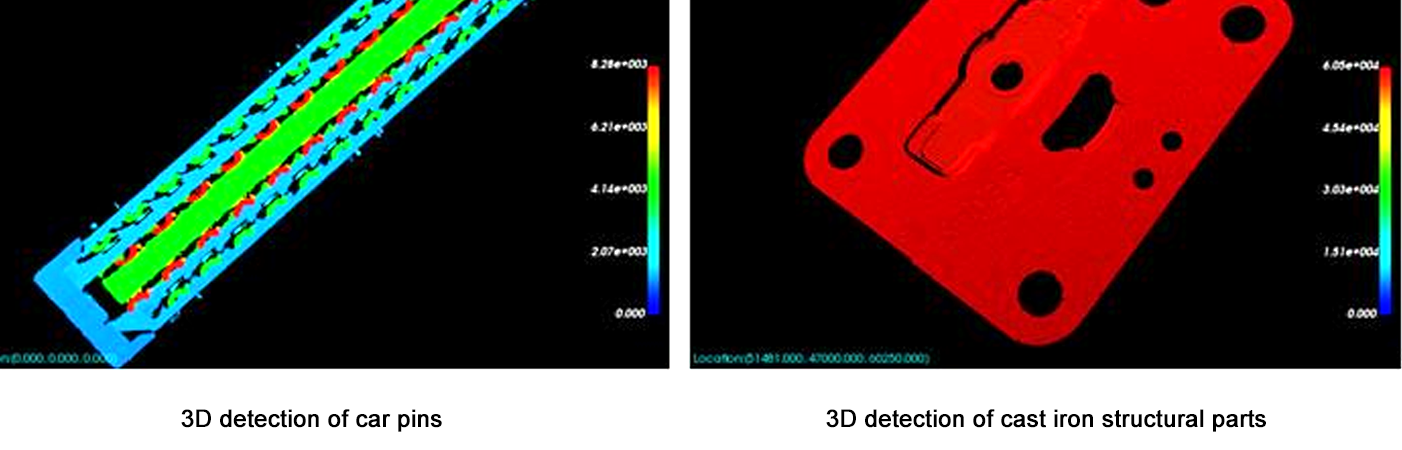
Những nhiệm vụ đơn giản như phát hiện chuyển động tạo ra tải tính toán thấp, cho phép máy chủ hỗ trợ nhiều camera hơn. Các nhiệm vụ phức tạp như tái tạo 3D hoặc nhận diện khuôn mặt tiên tiến yêu cầu nhiều tài nguyên, làm giảm số lượng camera được hỗ trợ. Ví dụ, một máy chủ có thể hỗ trợ 10 camera cho việc phát hiện chuyển động nhưng chỉ 3 camera cho ước tính độ sâu 3D thời gian thực.
5. Khung Đánh Giá
Sử dụng các bước sau để ước tính khả năng của camera:
Xác Định Tham Số Camera: Độ phân giải, tốc độ khung hình, nén và giao diện.
Tính Toán Lưu Lượng Dữ Liệu: Tốc Độ Dữ Liệu Không Nén = Độ Phân Giải × Tốc Độ Khung Hình × Độ Sâu Bit / 8 (ví dụ, 1080p ở 30 FPS = 1920×1080×30×24 / 8 = ~1.4 GB/s).
Đánh Giá Giới Hạn Phần Cứng: Đảm Bảo Công Suất Xử Lý CPU/GPU ≥ tổng lưu lượng dữ liệu × hệ số chi phí xử lý (2–5× cho các nhiệm vụ phức tạp).
Kiểm tra với các nguyên mẫu: Sử dụng công cụ đánh giá chuẩn (ví dụ: Intel VTune, NVIDIA Nsight) để đo lường việc sử dụng tài nguyên cho một camera đơn, sau đó mở rộng tuyến tính (với các điều chỉnh cho lợi ích/mất mát từ song song hóa).
Kết luận
Số lượng camera mà một máy chủ có thể hỗ trợ trong một hệ thống thị giác không phải là một con số cố định mà là sự cân bằng giữa khả năng phần cứng, thông số kỹ thuật của camera, tối ưu hóa phần mềm và độ phức tạp của nhiệm vụ. Đối với hầu hết các hệ thống, bắt đầu với một nguyên mẫu và dần dần mở rộng trong khi theo dõi việc sử dụng tài nguyên là cách tiếp cận đáng tin cậy nhất. Khi phần cứng (ví dụ: GPU nhanh hơn, bộ tăng tốc AI) và phần mềm (ví dụ: khung tính toán biên) tiếp tục phát triển với tốc độ nhanh chóng, khả năng hỗ trợ nhiều camera hơn với hiệu suất cao hơn sẽ tiếp tục tăng lên. Sự tiến hóa này sẽ cho phép phát triển các giải pháp thị giác tinh vi và có khả năng mở rộng hơn, mở ra những khả năng mới trong nhiều ngành công nghiệp khác nhau, từ y tế và vận tải đến an ninh và giải trí.
Bài viết này cung cấp một sự hiểu biết cơ bản cho các kiến trúc sư hệ thống và kỹ sư, nhấn mạnh nhu cầu về việc kiểm thử và tối ưu hóa tùy chỉnh để đáp ứng các yêu cầu cụ thể của ứng dụng. Bằng cách cân nhắc kỹ lưỡng tất cả các yếu tố liên quan, có thể thiết kế các hệ thống thị giác vừa hiệu quả vừa có khả năng xử lý những yêu cầu ngày càng tăng của các ứng dụng hiện đại.





