

Board Level Camera Integration Tips for Engineers
Selecting the Right Interface for Board Level Camera Integration
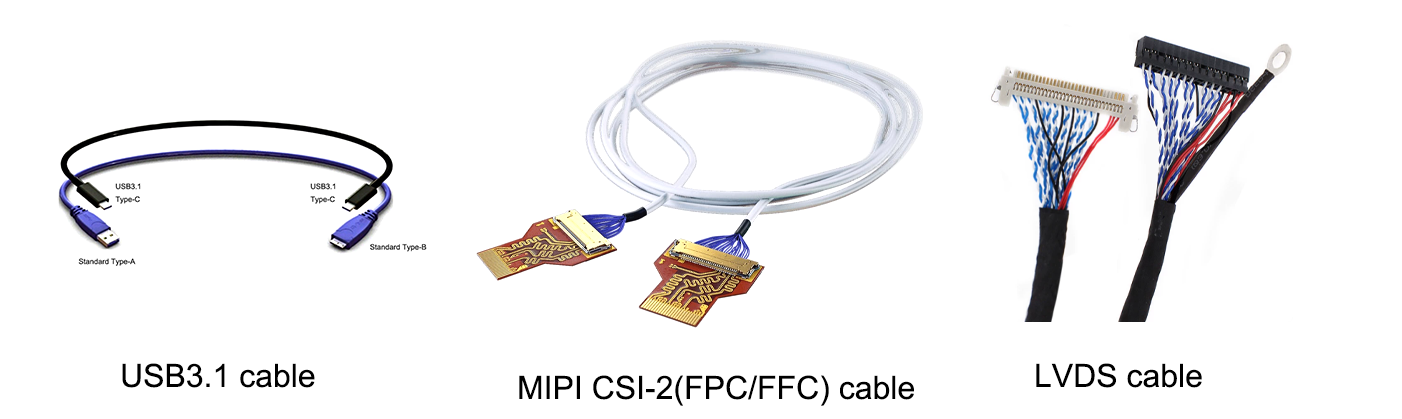
USB 3.1, MIPI CSI-2, and LVDS: Bandwidth, Latency, and Real-Time Synchronization Trade-offs
Embedded engineers face critical trade-offs when selecting interfaces for board-level camera integration. USB 3.1 delivers high bandwidth (5 Gbps), making it suitable for HD video streaming—but its protocol overhead introduces 5–10 ms latency, limiting suitability for real-time control loops. MIPI CSI-2 offers scalable bandwidth (up to 6 Gbps per lane) and hardware-triggered synchronization, enabling sub-millisecond latency and precise multi-sensor timing—ideal for industrial automation and robotics. LVDS provides deterministic, ultra-low-latency transmission (<1 ms) via simple serial protocols, though its per-channel bandwidth is capped at ~655 Mbps, restricting use to lower-resolution or compressed streams. Vision systems requiring tight inter-camera sync should prioritize MIPI CSI-2; safety-critical applications like autonomous vehicle perception benefit from LVDS’s timing predictability. USB 3.1 remains viable for cost-sensitive, non-real-time HD monitoring where minor latency is acceptable—provided thermal and processing constraints are validated.
Signal Integrity and PCB Layout Best Practices by Interface
Signal integrity is interface-specific and foundational to reliable board-level camera performance. For USB 3.1, maintain 90Ω differential impedance with length-matched pairs (±5 mil), ground-shielded routing, and strict separation from noisy digital traces to suppress EMI. MIPI CSI-2 requires 100Ω impedance per differential lane, length matching within ±10 mil, and avoidance of vias near receivers—especially critical for high-speed lanes operating above 1.5 Gbps. LVDS layouts demand short trace lengths (<10 inches), consistent 100Ω impedance, and guard traces to suppress crosstalk. Across all interfaces, partition ground planes to isolate analog sensor circuitry from digital ISP and processor domains, place decoupling capacitors within 2 mm of power pins, and use 4+ layer stackups with continuous reference planes. Improper routing accounts for 32% of image artifacts in prototype vision systems—making post-layout simulation and impedance validation non-negotiable for mission-critical designs.
Mechanical Integration: Lens Mounting and Optical Flexibility
Precise lens mounting is essential: micron-scale misalignments cause focus drift, distortion, or resolution loss. Engineers must balance mechanical rigidity—critical for shock/vibration resistance—with field-adjustability, typically achieved via threaded barrels or shim-based mounts. Optical flexibility requires compatibility across lens types (fixed-focus, varifocal, liquid) and support for focal length tuning through helical mechanisms or motorized controllers. Thermal expansion mismatches between lenses and sensors demand mitigation—using low-CTE materials (e.g., Invar, ceramic composites) or kinematic mounts—particularly in industrial environments (-40°C to +85°C). For infrared or multispectral imaging, substrate material transparency in the target band (e.g., germanium for LWIR, fused silica for UV) becomes a first-order design constraint. Modular lens interfaces enable rapid swapping without full recalibration, but flange distance tolerances must remain under 10 µm to prevent vignetting or MTF degradation.

Ensuring Robust System-Level Coexistence in Board Level Camera Designs
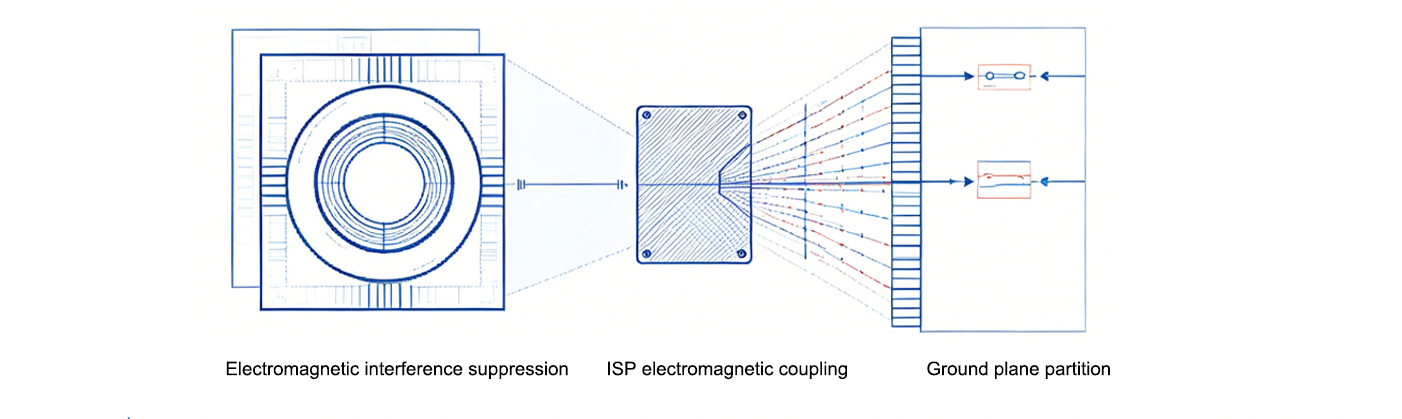
EMI Mitigation and Ground Plane Partitioning for Sensor-ISP Coexistence
Uncased board-level camera designs lack the EMI shielding of enclosed modules, placing greater responsibility on PCB-level isolation between image sensors and ISPs. Partitioned ground planes—separating analog sensor domains from digital ISP subsystems—are essential to minimize conducted noise coupling, as mixed-signal interference can introduce clock harmonics exceeding 50 dBμV/m (IEC 61000-4-3). Effective strategies include star-point grounding at power entry, guard traces with stitching vias around high-speed digital nets, avoiding thermal reliefs in ground pours near sensors, and adding ferrite beads on I²C clock lines. Signal integrity degrades rapidly when sensor-to-ISP spacing falls below 3λ of the highest operating frequency—necessitating impedance-controlled routing and matched-length differential pairs. Early prototyping with near-field EMI probes (5 mm spacing) identifies hotspots; localized mu-metal shielding over sensors reduces radiated emissions by 12–18 dB (FCC OET-65). Maintaining ≥40 mil clearance between mixed-signal domains consistently improves SNR by 20% in high-resolution modules.
Software Integration and SDK Portability for Board Level Cameras
Cross-Platform Driver Support: Linux RT, QNX, and Bare-Metal RTOS with Spinnaker
Cross-platform software portability is indispensable for embedded vision deployments spanning Linux Real-Time (RT), QNX, and resource-constrained bare-metal RTOS environments. Each OS imposes distinct timing, memory, and driver model requirements—yet consistent pixel-perfect acquisition and hardware-triggered synchronization must be preserved. A unified SDK abstraction layer bridges this gap: the Spinnaker SDK, for example, delivers standardized APIs across x86, ARM, and RISC-V platforms while natively supporting real-time frame capture, hardware triggering, and ISP register access. This eliminates redundant driver development when migrating from Linux RT industrial PCs to microcontroller-based RTOS targets. Teams leveraging such frameworks reduce integration time by up to 40%, while maintaining deterministic behavior—even under thermal derating or voltage scaling conditions.
Ready to Streamline Your Board Level Camera Integration for OEM Production?
Seamless board level camera integration is the cornerstone of reliable, high-performance embedded vision systems—no advanced algorithm or processing hardware can overcome poor interface selection, signal integrity flaws, or unoptimized mechanical design. By following field-proven integration best practices and partnering with a camera vendor that delivers pre-validated hardware, reference design support, and cross-platform software tools, you’ll reduce design iterations, accelerate time-to-market, and unlock consistent, cost-effective performance in volume OEM production.
For industrial-grade board level camera solutions tailored to your embedded vision application, or to access full reference design packages, in-house engineering support, and custom OEM manufacturing services (as offered by HIFLY), partner with a provider rooted in industrial machine vision expertise. HIFLY’s 15 years of experience spans board level camera design, full OEM/ODM customization, and end-to-end embedded vision system integration—backed by ISO 9001:2015 certification, global regulatory compliance support, and dedicated design-in engineering services. Contact us today for a no-obligation consultation, custom prototyping, or to optimize your board level camera integration workflow.





