

মেশিন ভিশনের জন্য দুটি ধরনের অ্যালগোরিদম
মেশিন ভিশন বায়োটা ইন্ডাস্ট্রিয়াল অটোমেশনের একটি কেন্দ্রীয় উপাদান হয়ে উঠেছে, যা দক্ষ মান নিয়ন্ত্রণ এবং দোষ পরিচয় সম্ভব করে। এর মৌলিক উপাদান হলো মেশিন ভিশন যা মানুষের চোখের বিচার ক্ষমতা পুনরুদ্ধার করতে অ্যালগোরিদমের উপর নির্ভর করে। এই অ্যালগোরিদমগুলি দুটি প্রধান শ্রেণীতে বিভক্ত হতে পারে: রুল-ভিত্তিক সিস্টেম এবং ডিপ লার্নিং অ্যালগোরিদম . তাদের তত্ত্ব, শক্তি এবং সীমাবদ্ধতার উপর ভিত্তি করে বাস্তব জগতের প্রয়োগে তাদের অপটিমাইজ করার জন্য এটি গুরুত্বপূর্ণ।
রুল-ভিত্তিক সিস্টেম
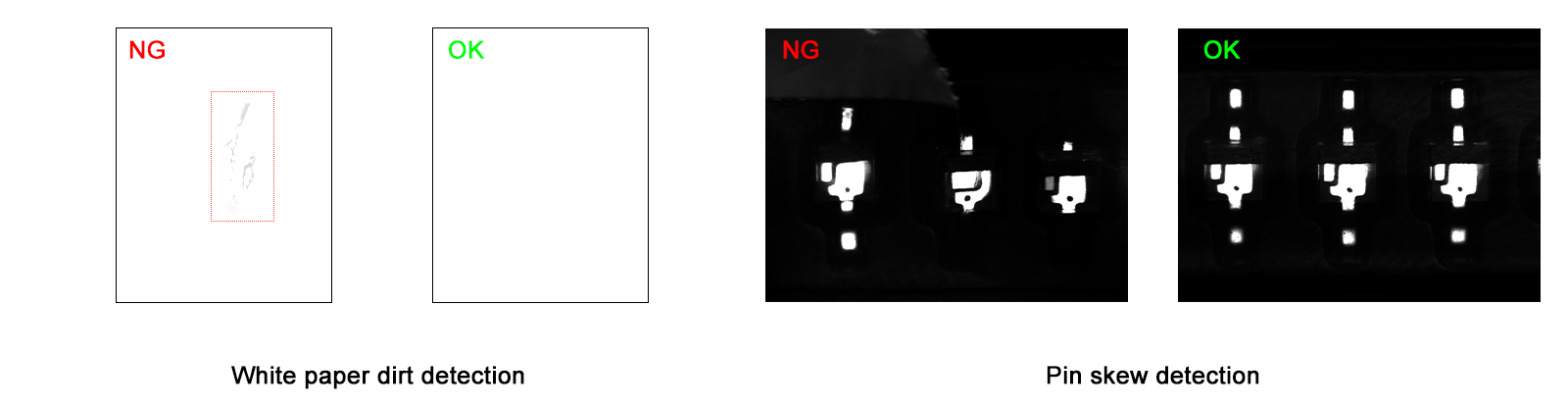
নিয়ম ভিত্তিক অ্যালগোরিদম: এই সিস্টেমগুলি একটি বস্তুর নির্দিষ্ট বৈশিষ্ট্য—যেমন রঙ, আকৃতি, বা গ্রেস্কেল মান—এনালাইজ করে এবং তা প্রতিষ্ঠিত সীমা বা প্যাটার্নের সাথে তুলনা করে। উদাহরণস্বরূপ:
- একটি শ্বেত কাগজের পাতায় দাগ থাকলে তা খারাপ হিসাবে চিহ্নিত করা যেতে পারে কারণ দাগের গ্রেস্কেল মান পটভূমি থেকে আলगা।
- একটি পণ্যে যদি একটি নির্ধারিত লোগো (একটি পূর্বনির্ধারিত প্যাটার্ন) থাকে না, তবে টেমপ্লেট ম্যাচিং-এর মাধ্যমে তা (অনুগ্রহ না করা) হিসাবে বিবেচিত হয়।
সুবিধা :
ডেপ্লয় করার সুবিধা : ফিচার প্যাটার্ন ভালভাবে সংজ্ঞায়িত হলে নিয়মগুলি প্রোগ্রাম করা সহজ।
নিম্ন গণনামূলক খরচ : নির্ধারিত গণনা কারণে সর্বনিম্ন হার্ডওয়্যারের প্রয়োজন।
সীমাবদ্ধতা :
স্থিতিশীল পরিবেশের দাবি : আলোক, ক্যামেরা কোণ এবং পণ্যের অবস্থান খুবই সমতা বজায় রাখতে হবে।
সীমিত পরিবর্তনশীলতা : পণ্যের আবশ্যকীয়তা (যেমন, মাতেরিয়াল টেক্সচার ফ্লাকচুয়েশন) এর ছোট ছোট পরিবর্তন বা অসুষ্ঠু দোষ (যেমন, যাদৃচ্ছিক খাড়া) ভুল বিচারে হতে পারে।
অনুশাসন ভিত্তিক সিস্টেম বাস্তবে উচ্চ নিয়ন্ত্রিত পরিবেশে উত্তমভাবে কাজ করে যেখানে পণ্য নির্দিষ্টিকরণ এবং পরীক্ষা শর্তাবলী সঠিকভাবে আদর্শ করা হয়। তবে, তাদের স্থিতিশীলতা ডায়নামিক বা অপ্রেডিক্টেবল সেটিংসে প্রকাশ পায়।
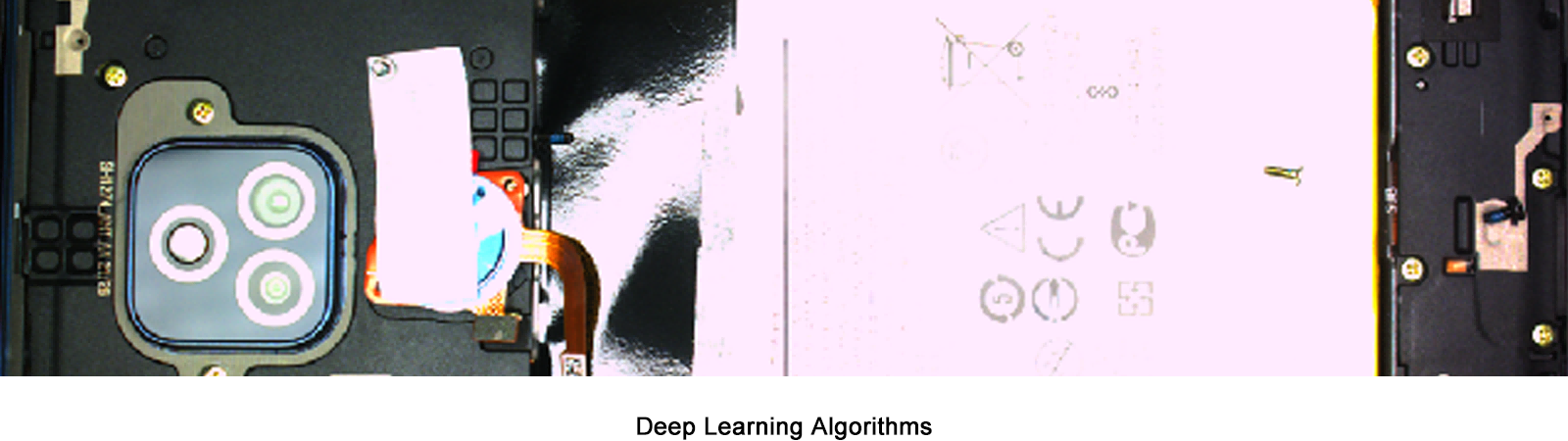
ঘন শিখন অ্যালগোরিদম: জটিলতা থেকে শিখুন
ঘন শিখন মানুষের কogniitive প্রক্রিয়া অনুকরণ করে বৃহৎ ডেটাসেটের উপর নিউরাল নেটওয়ার্ক প্রশিক্ষণ দেয়। অনুশাসন ভিত্তিক সিস্টেমের বিপরীতে, এই অ্যালগোরিদম ছবি থেকে স্বয়ংক্রিয়ভাবে বৈশিষ্ট্য নিষ্কাশন করে, যা তাদের জটিল সিনারিও প্রতিবাদ করতে দেয়, যেমন:
অসুষ্ঠু দোষ নির্ণয় (যেমন, যাদৃচ্ছিক-আকৃতির ফ্র্যাকচার বা দাগ)।
গুচ্ছিত পটভূমিতে বস্তু আলग করা।
সুবিধা :
বিশৃঙ্খল পরিবেশে উচ্চ সঠিকতা : রোশনী, কোণ এবং উत্পাদ অসঙ্গতির পরিবর্তনে অভিযোজিত হয়।
সাধারণতার মাত্রা : একবার প্রশিক্ষিত হওয়ার পর, মডেলগুলি শিখা শ্রেণিবদ্ধকরণের মধ্যে নতুন দোষ প্যাটার্ন চিহ্নিত করতে পারে।
চ্যালেঞ্জসমূহ :
ডেটা চাহিদা : ট্রেনিং-এর জন্য শত থেকে হাজার টাকি লেবেলযুক্ত ছবির প্রয়োজন হয়, যা ডেফেক্টিভ নমুনার উপর ভারি নির্ভরশীল। উৎপাদনে, ডেফেক্ট অনেক সময় বিরল হওয়ায় ডেটা সংগ্রহের ধাপগুলোকে দীর্ঘ করতে হয় (সপ্তাহ থেকে মাস)।
স্কেলিংয়ের সমস্যা : নতুন পণ্য নির্দেশিকায় স্বিচ করার সময় সাধারণত শুরু থেকে পুনর্ত্রেনিংয়ের প্রয়োজন হয়, যা সময় এবং সম্পদের খরচ বাড়িয়ে দেয়।
সঠিক টুল নির্বাচন: কনটেক্সট গুরুত্বপূর্ণ
রুল-ভিত্তিক এবং গভীর শিখানা অ্যালগোরিদমের মধ্যে বাছাই বিশেষ ব্যবহার কেসের উপর নির্ভর করে:
রুল-ভিত্তিক সিস্টেম উচ্চ আয়তনের, মানদণ্ডকৃত উৎপাদন (যেমন, সেমিকনডাক্টর উপাদান) এ সফল হয় যেখানে সঙ্গতি গ্যারান্টি পাওয়া যায়।
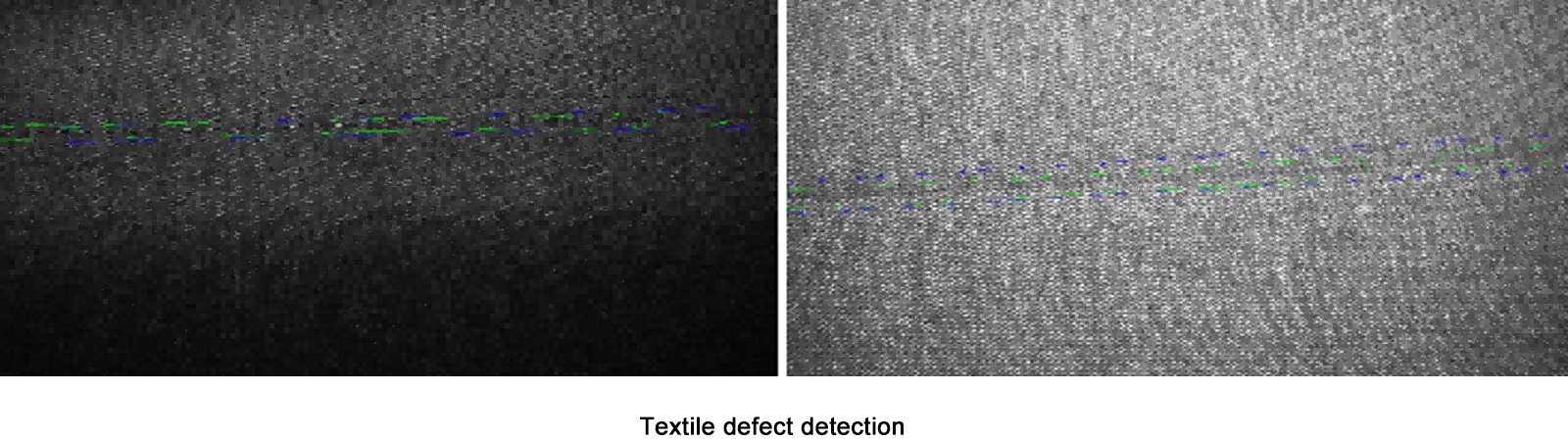
গভীর শিখানা নিম্ন আয়তনের, উচ্চ পরিবর্তনশীলতা সহ জটিল সিনারিওতে (যেমন, টেক্সটাইল ডিফেক্ট ডিটেকশন) বা যখন ডিফেক্টগুলি প্রেডিক্টেবল প্যাটার্ন থাকে না।
বিশেষ করে, মিশ্র পদ্ধতি ব্যবহার করা শুরু হয়েছে। উদাহরণস্বরূপ, নিয়ম-ভিত্তিক ফিল্টারগুলি ইমেজ প্রিপ্রসেসিং করতে পারে যা ডিপ লার্নিং ভারকে কমায়, অন্যদিকে সিনথেটিক ডেটা জেনারেশন টুলগুলি ট্রেইনিং স্যাম্পলের অভাবকে হल করে।
উপসংহার
মেশিন ভিশনের কার্যকারিতা এলগোরিদমের ক্ষমতা এবং চালু বাস্তবতার সঙ্গে মিলিয়ে যাওয়ায় নির্ভর করে। নিয়ম-ভিত্তিক সিস্টেম সরলতা এবং গতিতে প্রদান করে কিন্তু অপ্রেডিক্টেবল পরিবেশে ব্যর্থ হয়। ডিপ লার্নিং প্রসারিত ক্ষমতা এবং সঠিকতা প্রদান করে কিন্তু বড় পরিমাণে আগের বিনিয়োগের দরকার হয়। চূড়ান্তভাবে, যেকোনো সিস্টেমের স্থিতিশীলতা তিনটি ফ্যাক্টরের উপর নির্ভর করে: পণ্যের এককতা, পরিবেশের নিয়ন্ত্রণ, এবং স্যাম্পলের বৈচিত্র্য। এই চলকগুলি নিয়ন্ত্রণ করা মেশিন ভিশনের জন্য নির্ভুলতা এবং বিশ্বস্ততার প্রতিশ্রুতিকে পূরণ করে।





