

যে কারণে মেশিন ভিশনের জন্য উচ্চ-সত্যতা আকার পরীক্ষা করা কঠিন, তা কেন?
শিল্প অটোমেশন এবং গুণমান নিয়ন্ত্রণের দ্রুত পরিবর্তিত ল্যান্ডস্কেপে, মেশিন ভিজন বিভিন্ন পরিদর্শন কাজের জন্য একটি শক্তিশালী সরঞ্জাম হিসাবে আবির্ভূত হয়েছে। তবে, এর অনেক সুবিধা সত্ত্বেও, উচ্চ-নির্ভুলতা মাত্রা পরিদর্শন অর্জন একটি উল্লেখযোগ্য চ্যালেঞ্জ হিসাবে রয়ে গেছে। এই নিবন্ধে মেশিন ভিউয়ের মাধ্যমে সঠিক মাত্রা পরিমাপ করা কঠিন হওয়ার মূল কারণগুলি নিয়ে আলোচনা করা হয়েছে।
হার্ডওয়্যার - সম্পর্কিত সীমাবদ্ধতা
মেশিন ভিউশন সিস্টেমের হার্ডওয়্যার উপাদানগুলি, ক্যামেরা এবং লেন্স সহ, নির্ভুলতার জন্য অন্তর্নিহিত সীমাবদ্ধতা আরোপ করে। নিম্ন রেজোলিউশনের ক্যামেরা বস্তুগুলির সূক্ষ্ম বিবরণ ক্যাপচার করতে অক্ষম, যা ভুল মাত্রা গণনার দিকে পরিচালিত করে। এমনকি উচ্চ রেজোলিউশনের ক্যামেরাগুলোতেও পিক্সেলের আকার একটি গুরুত্বপূর্ণ বিষয়। ছোট পিক্সেলগুলি তত্ত্বগতভাবে আরও বিস্তারিত চিত্র সরবরাহ করতে পারে, তবে তারা প্রতি পিক্সেলের দ্বারা ধরা আলো পরিমাণও হ্রাস করে, চিত্রের গোলমাল বাড়ায়। এই শব্দ বস্তুগুলির প্রান্তকে বিকৃত করতে পারে, যার ফলে তাদের সীমানা সঠিকভাবে নির্ধারণ করা কঠিন হয়ে পড়ে।
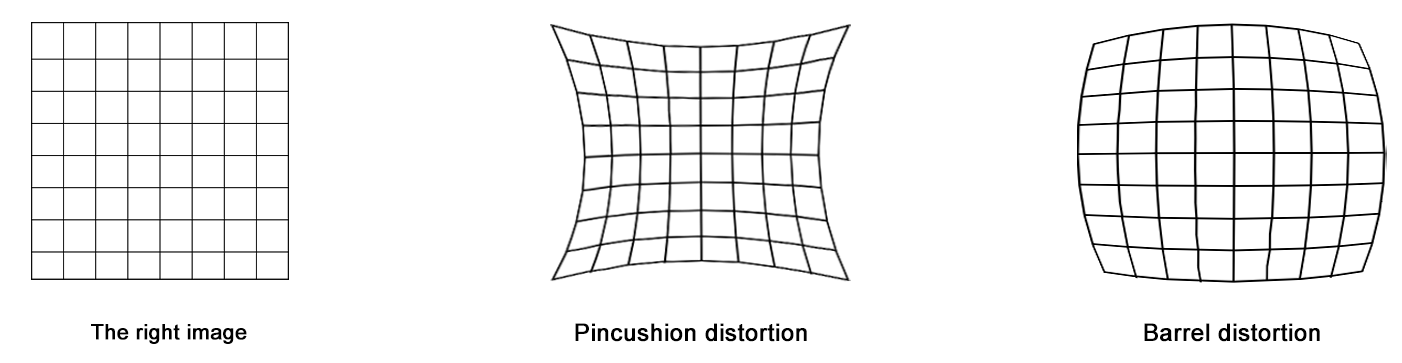
মেশিন ভিউয়ের সঠিকতায় শিল্প লেন্সেরও গুরুত্বপূর্ণ ভূমিকা রয়েছে। জ্যামিতিক বিকৃতি, যেমন ব্যারেল এবং পিন কুশন বিকৃতি, লেন্সে সাধারণ। এই বিকৃতিগুলি বাস্তব জগতে সোজা রেখাগুলিকে ক্যাপচার করা চিত্রগুলিতে বাঁকা দেখায়, যা মাত্রা পরিমাপের নির্ভুলতাকে উল্লেখযোগ্যভাবে প্রভাবিত করতে পারে। এছাড়াও, লেন্সগুলি ক্রোম্যাটিক এবারেশন থেকে ভোগে, যেখানে বিভিন্ন তরঙ্গদৈর্ঘ্যের আলো বিভিন্ন পয়েন্টে ফোকাস করা হয়, যার ফলে বস্তুর চারপাশে রঙের প্রান্তিককরণ এবং পরিমাপের নির্ভুলতা আরও হ্রাস পায়। এই লেন্সের ত্রুটিগুলি সংশোধন করার জন্য জটিল ক্যালিব্রেশন পদ্ধতি প্রয়োজন, এবং পুরো দৃষ্টি ক্ষেত্র জুড়ে নিখুঁত সংশোধন অর্জন করা অত্যন্ত কঠিন।
অপটিক্সের শারীরিক সীমাবদ্ধতা
অপটিক্সের ভৌত নীতিগুলি মেশিন ভিউতে উচ্চ-নির্ভুলতা মাত্রা পরিদর্শন করার জন্য মৌলিক বাধা উপস্থাপন করে। আলোর বিভাজন একটি প্রধান সমস্যা। অপটিক্সের নিয়ম অনুযায়ী, যখন আলো ছোট ছোট খোলার মধ্য দিয়ে বা ছোট ছোট বস্তুর চারপাশে যায়, তখন তা বিচ্ছিন্ন হয়, যার ফলে বস্তুর চিত্রের প্রান্তগুলি অস্পষ্ট হয়ে যায়। ছোট ছোট উপাদানগুলি পরিদর্শন করার ক্ষেত্রে, এই বিভাজন প্রভাবটি ঘনিষ্ঠভাবে দূরবর্তী বৈশিষ্ট্যগুলির মধ্যে সঠিকভাবে পার্থক্য করা অসম্ভব করে তুলতে পারে, যা মাত্রা পরিমাপে ত্রুটি সৃষ্টি করে।
আরেকটি অপটিক্যাল সীমাবদ্ধতা হল সীমিত ক্ষেত্রের গভীরতা। মেশিন ভিউতে, যদি বস্তুর জটিল তিন-মাত্রিক আকৃতি থাকে অথবা যদি ক্যামেরার তুলনায় বস্তুর অবস্থানে পরিবর্তন হয়, তবে বস্তুর কিছু অংশ ফোকাসের বাইরে থাকতে পারে। এই অস্পষ্টতা বস্তুর চেহারাকে বিকৃত করতে পারে, যা সঠিকভাবে মাত্রা পরিমাপ করা কঠিন করে তোলে। ক্ষেত্রের গভীরতা সামঞ্জস্য করার জন্য প্রায়ই বাণিজ্য-অফ জড়িত; ক্ষেত্রের গভীরতা বৃদ্ধি রেজল্যুশন হ্রাস করতে পারে, যখন রেজল্যুশন বৃদ্ধি ক্ষেত্রের গভীরতা সংকীর্ণ করতে পারে।

পরিবেশগত হস্তক্ষেপ
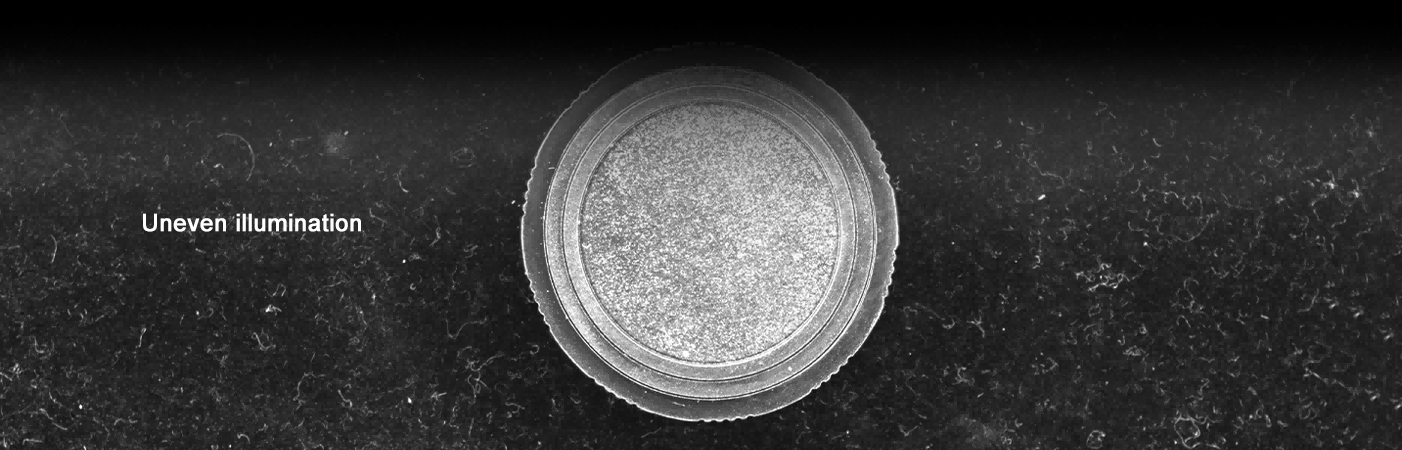
মেশিন ভিজন সিস্টেমগুলি পরিচালিত পরিবেশটি মাত্রা পরিদর্শনের নির্ভুলতার উপর গভীর প্রভাব ফেলতে পারে। আলোর অবস্থা অত্যন্ত পরিবর্তনশীল এবং সমালোচনামূলক। আলোর তীব্রতা, দিক এবং রঙের তাপমাত্রার পরিবর্তন চিত্রের বস্তুর চেহারা পরিবর্তন করতে পারে। উদাহরণস্বরূপ, অসম আলো বস্তুর উপর ছায়া তৈরি করতে পারে, যা বস্তুর আকৃতির অংশ হিসাবে ভুলভাবে ব্যাখ্যা করা যেতে পারে, যা ভুল মাত্রা গণনার দিকে পরিচালিত করে। বস্তুর প্রতিফলিত পৃষ্ঠগুলিও ঝলকানি সৃষ্টি করতে পারে, যা ক্যামেরা সেন্সরকে পরিপূর্ণ করতে পারে এবং গুরুত্বপূর্ণ বৈশিষ্ট্যগুলিকে অন্ধ করে দিতে পারে।
পরিবেষ্টিত তাপমাত্রা এবং আর্দ্রতা মেশিন ভিউ সিস্টেমের কার্যকারিতাকেও প্রভাবিত করতে পারে। তাপমাত্রা পরিবর্তনগুলি পরিদর্শন করা বস্তু এবং দৃষ্টি সিস্টেমের হার্ডওয়্যার উপাদান উভয়ই তাপীয় প্রসারণ বা সংকোচনের কারণ হতে পারে, যা মাত্রাগত পরিবর্তন ঘটায়। আর্দ্রতা লেন্স বা অন্যান্য অপটিক্যাল উপাদানগুলিতে ঘনীভবন সৃষ্টি করতে পারে, যা চিত্রের গুণমান এবং পরিমাপের নির্ভুলতা হ্রাস করে।
বস্তুর সমতলতা - উদ্ভূত চ্যালেঞ্জ
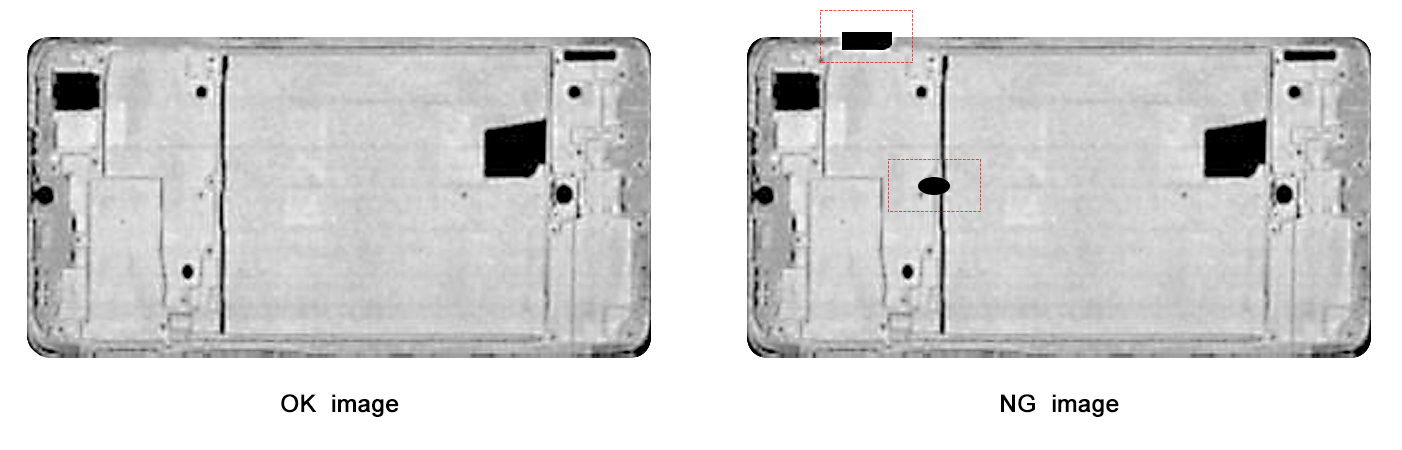
একটি বস্তুর সমতলতা একটি প্রায়ই উপেক্ষা করা কিন্তু গুরুত্বপূর্ণ কারণ যা মেশিন ভিউ-ভিত্তিক মাত্রা পরিদর্শন সঠিকতা বাধা দেয়। যখন কোনও বস্তুর পৃষ্ঠটি অসমান হয়, তখন আলো এবং বস্তুর মধ্যে মিথস্ক্রিয়া অনির্দেশ্য হয়ে যায়। গলিত বা খাড়া এলাকায়, আলো প্রতিফলন প্রত্যাশিত প্যাটার্ন থেকে বিচ্যুত হয়। ক্যামেরার দিকে ধারাবাহিকভাবে আলোর প্রতিফলন করার পরিবর্তে, অসামান্য পৃষ্ঠগুলি আলোকে ছড়িয়ে দেয়, উজ্জ্বল দাগ এবং ছায়া তৈরি করে যা বস্তুর প্রকৃত জ্যামিতির সাথে মিলে না। এই অসঙ্গতিপূর্ণ আলোকের নিদর্শনগুলি প্রান্ত সনাক্তকরণ অ্যালগরিদমকে বিভ্রান্ত করতে পারে, যার ফলে তারা বস্তুর সীমানা ভুলভাবে চিহ্নিত করতে পারে। উদাহরণস্বরূপ, অন্যথায় সমতল পৃষ্ঠের উপর একটি ছোট protrusion একটি স্বতন্ত্র বৈশিষ্ট্য জন্য ভুল হতে পারে, ফলে inflated মাত্রা পরিমাপ।
উপরন্তু, 3 ডি মেশিন ভিজন সিস্টেমে যা কাঠামোগত আলোর প্রক্ষেপণ বা স্টেরিও ম্যাচিংয়ের মতো কৌশলগুলির উপর নির্ভর করে, একটি অসামান্য পৃষ্ঠ গভীরতা উপলব্ধির মৌলিক প্রক্রিয়াগুলিকে ব্যাহত করে। কাঠামোগত আলোর সাথে, প্রজেক্ট করা নিদর্শনগুলি অনিয়মিত পৃষ্ঠের উপর বিকৃত হয়, গভীরতার তথ্য সঠিকভাবে ডিকোড করা কঠিন করে তোলে। স্টেরিও ভিউতে, পৃষ্ঠের সমতলতার বৈচিত্র্য দুটি ক্যামেরার ভিউয়ের মধ্যে সংশ্লিষ্ট পয়েন্টগুলি মেলে ভুল হতে পারে, কারণ অনিয়মগুলি বৈষম্য তৈরি করে যা প্রকৃত দূরত্বকে প্রতিফলিত করে না। ফলস্বরূপ, উচ্চ নির্ভুলতার সাথে বস্তুর 3D আকৃতি পুনর্গঠন একটি ভয়ঙ্কর কাজ হয়ে ওঠে, যা সরাসরি মাত্রা পরিদর্শন নির্ভুলতা প্রভাবিত করে।
অ্যালগরিদমিক এবং সফটওয়্যার সীমাবদ্ধতা
মেশিন ভিউশনে ব্যবহৃত অ্যালগরিদম এবং সফটওয়্যারগুলির নিজস্ব চ্যালেঞ্জ রয়েছে। প্রান্ত সনাক্তকরণ, বস্তুর মাত্রা নির্ধারণের একটি মৌলিক পদক্ষেপ, প্রায়ই জটিল এবং ত্রুটি-প্রবণ। ক্যানি, সোবেল, বা ল্যাপলাসের মতো বিভিন্ন প্রান্ত সনাক্তকরণ অ্যালগরিদমের নিজস্ব শক্তি এবং দুর্বলতা রয়েছে। ছবিতে শব্দ হলে ভুল প্রান্ত দেখা যায়, যখন কম বিপরীতে দেখা যায় তখন ভুল প্রান্ত দেখা যায়।
উপরন্তু, মাত্রা গণনা করার জন্য সনাক্ত করা প্রান্তগুলিতে জ্যামিতিক মডেলগুলি সঠিকভাবে ফিট করা একটি কঠিন কাজ। বস্তুর অনিয়মিত আকৃতি, পৃষ্ঠের ত্রুটি বা টেক্সচারের বৈচিত্র থাকতে পারে, যা অ্যালগরিদমকে বিভ্রান্ত করতে পারে। উপরন্তু, জটিল তিন-মাত্রিক জ্যামিতির সাথে বস্তুগুলি পরিচালনা করার জন্য উন্নত 3D পুনর্গঠন অ্যালগরিদম প্রয়োজন, যা কম্পিউটারিকভাবে ব্যয়বহুল এবং প্রায়শই প্রয়োজনীয় নির্ভুলতার অভাব।
উপসংহারে, মেশিন ভিউশন দিয়ে উচ্চ-নির্ভুলতা মাত্রা পরিদর্শন অর্জনের অসুবিধা হার্ডওয়্যার সীমাবদ্ধতা, অপটিক্যাল সীমাবদ্ধতা, পরিবেশগত হস্তক্ষেপ, বস্তুর সমতলতা সম্পর্কিত সমস্যা এবং অ্যালগরিদমিক এবং সফ্টওয়্যার চ্যালেঞ্জগুলির সংমিশ্র এই বাধা অতিক্রম করার জন্য অপটিক্স, ইলেকট্রনিক্স, কম্পিউটার বিজ্ঞান এবং উপাদান বিজ্ঞান সহ একাধিক ক্ষেত্রে অবিচ্ছিন্ন গবেষণা এবং বিকাশের প্রয়োজন। এই সমস্যাগুলি সমাধান করে আমরা পরিমাপ পরিদর্শনের জন্য মেশিন ভিজ্যুয়াল সিস্টেমের নির্ভুলতা এবং নির্ভরযোগ্যতা উন্নত করতে পারি, যা আধুনিক শিল্প অ্যাপ্লিকেশনগুলির ক্রমবর্ধমান কঠোর প্রয়োজনীয়তা পূরণ করতে সক্ষম করে।





