Dešifrování průmyslové kamerové vize: Podrobný pohled na principy inspekce
Průmyslové kamery jsou očima strojového vidění a pochopení jejich základních principů je klíčové pro optimalizaci výkonu. Tento článek rozebírá základní technologie stojící za průmyslovou kamerovou vizi a pomáhá inženýrům i nadšencům pochopit její funkční principy a doladit své systémy k úspěchu.
1. Základní komponenty průmyslové kamery
Než se ponoříme do principů, pojďme pochopit základní stavební kameny:
Optický systém: Objektiv je srdcem soustředění světla. Je důležité vybrat objektiv, který odpovídá úhlu pohledu, hloubce ostrosti a rozlišení dané aplikace. Například pro kameru s rozlišením 5 megapixelů je třeba zvolit objektiv, který dokáže rozlišit jemné detaily až do velikosti jediného pixelu.
Snímač: CMOS nebo CCD senzor převádí světlo na elektrické signály. Hlavní metriky zahrnout Kvantová účinnost (QE) , která by ideálně měla být nad 60 % pro optimální převod světla, a Dynamický rozsah , která by měla být vyšší než 70 dB, aby zvládla široké spektrum intenzit světla.
Obrazový procesor: Tato komponenta zajišťuje úkoly, jako je Bayerova interpolace , snížení hluku , a barvivá korekce , při které se pro vyvážení bílých hladin používají algoritmy, například matice 3x3.

2. Základní principy průmyslového kamerového vidění
Jakmile je obraz zachycen, tyto pokročilé principy se uplatní pro získání smysluplných dat:
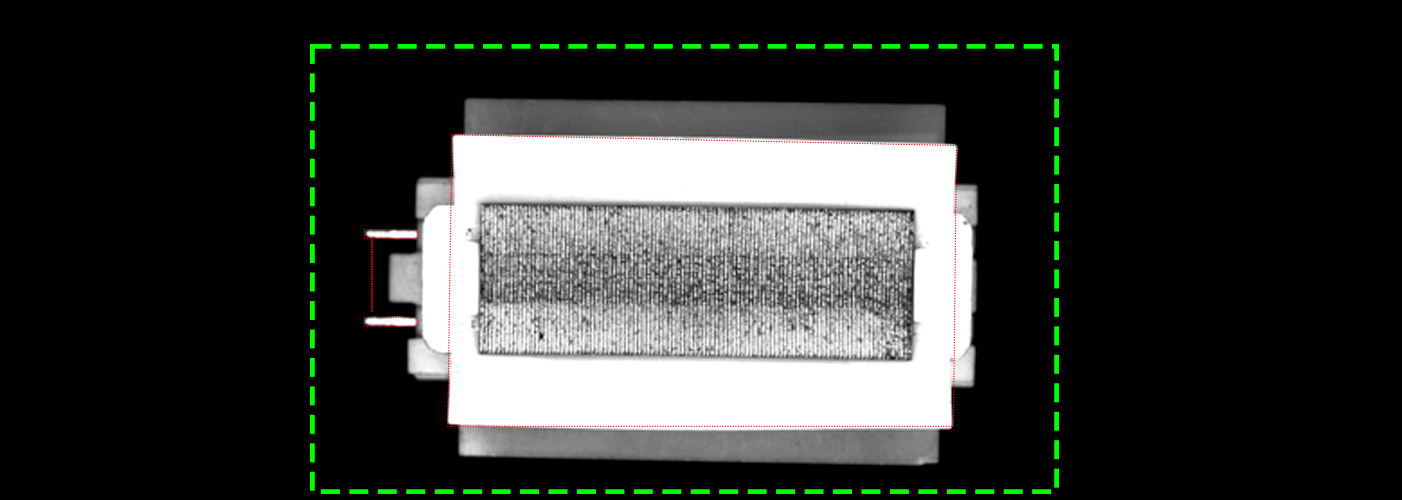
Extrakce znaků: Algoritmy jako Cannyho operátor pro detekci hran nebo Normalizovaná korelace (NCC) pro porovnání podle šablony se používají k lokalizaci konkrétních cílů s přesností na subpixel, často dosahující přesnosti 0,1px.
Korekce zkreslení: Pro zajištění přesnosti měření se zkreslení opravuje pomocí kalibračních metod. Tato metoda vypočítává radiální a tangenciální koeficienty zkreslení (k1,k2,p1,p2), aby se chyby měření udržely v rozmezí ±0,05mm.
Kompenzace pohybu: U pohybujících se objektů je důležité zabránit rozmazání. Toho je dosaženo úpravou expozičního času na základě rychlosti objektu (např. expozice ≤500μs pro objekt pohybující se rychlostí 1m/s) a použitím globálního závěru.
3. Praktické aplikace průmyslových kamerových systémů
Tyto principy jsou uplatňovány v různých odvětvích:
Měření Rozměrů: Kalibrací pixelů na reálné měřítko (např. 1px = 0,02 mm) mohou tyto systémy provádět vysoce přesná měření s opakovatelností ±1 μm.
Detekce vad: Použitím modelů hloubkového učení jako je ResNet18 , mohou průmyslové kamery klasifikovat povrchové škrábance a další vady s přesností přesahující 99,5 %.
Navigace robotů: Prostřednictvím kalibrace více bodů mohou tyto systémy navigovat roboty převodem kamerových souřadnic do souřadnicového systému robota s minimální chybou, často menší než 0,1°.