

Dva typy algoritmů pro strojové vidění
Počítačové vidění se stalo klíčovým prvkem průmyslové automatizace, umožňuje efektivní kontrolu kvality a detekci vad. V jádru závisí počítačové vidění na algoritmech, které imitují lidské vizuální posouzení. Tyto algoritmy lze široce rozdělit do dvou typů: pravidelné systémy a algoritmy hlubokého učení . Porozumění jejich principům, silám a omezením je kritické pro optimalizaci jejich využití v praktických situacích.
Pravidelné systémy
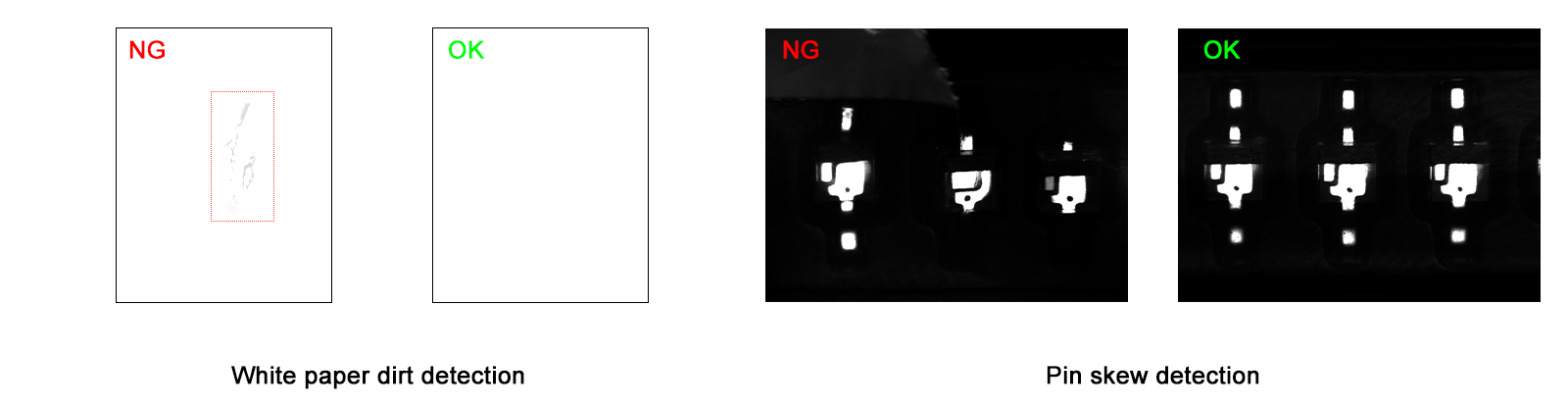
Algoritmy založené na pravidlech: Tyto systémy analyzují konkrétní vlastnosti objektu – jako barvu, tvar nebo hodnoty šedého stupně – a porovnávají je s danými prahy nebo vzory. Například:
- Bílý list papíru se skvrnami může být označen jako vadný, protože skvrny mají jinou šedou hodnotu než pozadí.
- Produkt bez standardního loga (předem definovaného vzoru) je považován za (nesplňující požadavky) prostřednictvím porovnávání vzorů.
Výhody :
Snadnost nasazení pravidla jsou jednoduchá k naprogramování, jakmile jsou vlastnosti vzorů dobře definovány.
Nízké výpočetní nároky : Minimální požadavky na hardware díky deterministickým výpočtům.
Omezení :
Přísné požadavky na prostředí : Osazení, úhly kamery a poloha produktu musí zůstat velmi konzistentní.
Omezená pružnost : I dokonce i menší rozdíly ve vzhledu produktu (například fluktuace textury materiálu) nebo neregulární defekty (například náhodné škrty) mohou vést ke špatným posudcům.
V praxi se systémy založené na pravidlech vyznačují v přísně kontrolovaných prostředích, kde jsou specifikace produktů a podmínky pro kontrolu přísně standardizované. Nicméně jejich křehkost se projevuje v dynamických nebo nepředvídatelných situacích.
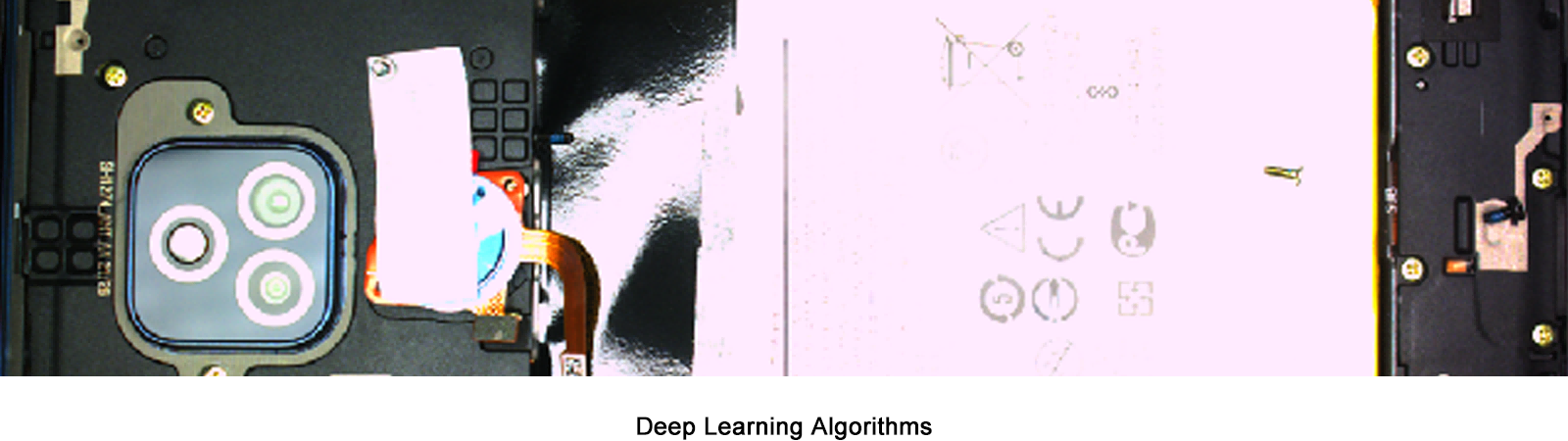
Algoritmy hlubokého učení: Učení se ze složitosti
Hluboké učení napodobuje lidské kognitivní procesy trénováním neuronových sítí na obrovských datech. Na rozdíl od systémů založených na pravidlech tyto algoritmy samostatně extrahují znaky z obrázků, což jim umožňuje zvládnout složité scénáře jako jsou:
Detekce neregulárních defektů (například náhodně tvarované trhliny nebo skvrny).
Rozlišování objektů na zaschlých pozadích.
Výhody :
Vysoká přesnost v chaotických prostředích : Přizpůsobí se variacím v osvětlení, úhlech a nekonzistencích produktu.
Obecná použitelnost : Jakmile jsou modely natrénovány, mohou rozpoznávat nové vady v rámci naučených kategorií.
Výzvy :
Hlad po datech : Trénování vyžaduje stovky až tisíce označených obrázků, s významnou závislostí na vadných vzorcích. Ve výrobě jsou defekty často vzácné, což vyžaduje prodloužené fáze sběru dat (týdny až měsíce).
Problémy škálovatelnosti : Přechod na novou produktní specifikaci obvykle vyžaduje opětovné trénování od nuly, což zvyšuje náklady času a zdrojů.
Výběr správného nástroje: Důležitost kontextu
Volba mezi pravidelnými a hloubkovými učebními algoritmy závisí na konkrétních použitích:
Pravidelné systémy úspěšně fungují v produkci s vysokým objemem a standardizací (např., součástky pro elektroniku), kde je zajištěna konzistence.
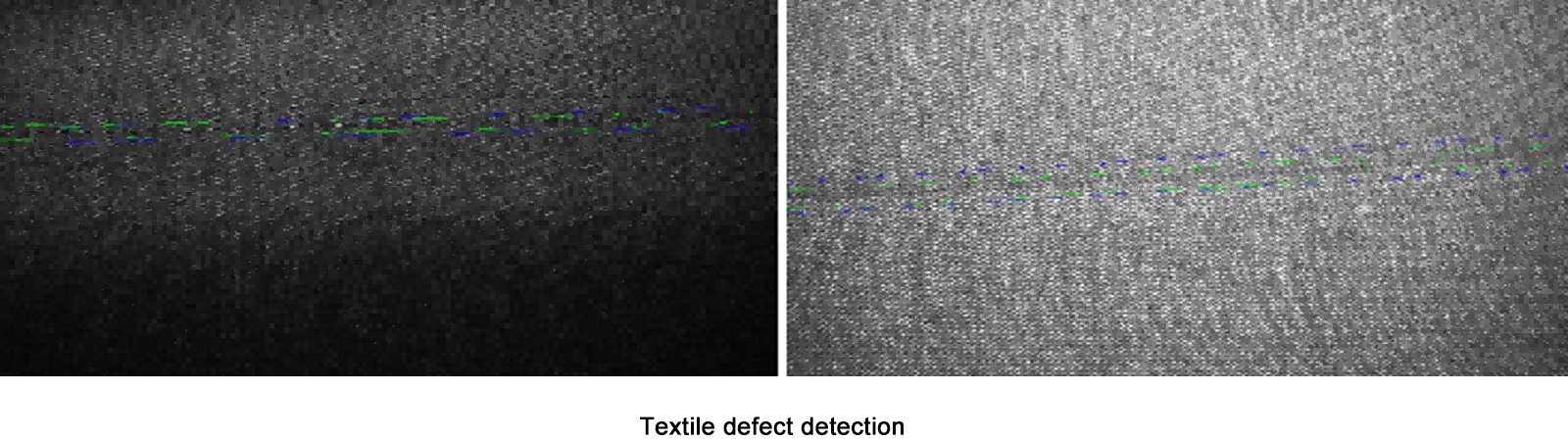
Hloubkové učení vyniká v situacích s nízkým objemem a vysokou variabilitou (např., detekce vad v textilu) nebo když vady nemají předvídatelné vzory.
Zvláště vynikají hybridní přístupy. Například pravidelně založené filtry mohou předzpracovávat obrázky a tím snížit pracovní zátěž hlubokého učení, zatímco nástroje pro generování syntetických dat zmírní nedostatek tréninkových vzorků.
Závěr
Účinnost strojového vidění závisí na zarovnání schopností algoritmů s operačními realitami. Pravidelně založené systémy nabízejí jednoduchost a rychlost, ale selhávají v nepredikovatelných prostředích. Hluboké učení poskytuje flexibilitu a přesnost, ale vyžaduje významné počáteční investice. Nakonec stabilita jakéhokoli systému závisí na třech faktorech: produktové jednotnosti, řízení prostředí a rozmanitosti vzorků. Ovládnutí těchto proměnných zajistí, aby strojové vidění dodrželo své sliby přesnosti a spolehlivosti.





