Industrielle Kameratechnik entfesselt: Ein tiefer Einblick in die Prinzipien der Inspektion
Industrielle Kameras sind die Augen der maschinellen Bildverarbeitung, und das Verständnis ihrer Grundprinzipien ist entscheidend, um die Leistung zu optimieren. Dieser Artikel erläutert die grundlegende Technologie hinter der Industriekamera-Vison und hilft Ingenieuren und Enthusiasten, die inneren Abläufe zu verstehen und ihre Systeme für den Erfolg zu optimieren.
1. Die Kernkomponenten einer Industriekamera
Bevor wir uns mit den Prinzipien beschäftigen, sollten wir die wesentlichen Grundelemente verstehen:
Optisches System: Das Objektiv ist das lichtsammelnde Herzstück. Es ist entscheidend, ein Objektiv auszuwählen, das zum Anwendungsbereich in Bezug auf Sichtfeld, Schärfentiefe und Auflösung passt. Beispielsweise benötigt eine Kamera mit 5 Megapixeln ein Objektiv, das feine Details bis zur Pixelgröße auflösen kann.
Sensor: Der CMOS- oder CCD-Sensor wandelt Licht in elektrische Signale um. Wichtige Kennzahlen einschließen Quanteneffizienz (QE) , die idealerweise bei über 60 % liegen sollte, um eine optimale Lichtumwandlung zu gewährleisten, und Dynamikbereich , die über 70 dB liegen sollte, um einen breiten Bereich von Lichtintensitäten verarbeiten zu können.
Bildprozessor: Dieses Bauteil übernimmt Aufgaben wie Bayer-Interpolation , lärmmminderung , und farbkorrektur , wobei Algorithmen wie eine 3x3-Matrix verwendet werden, um die Weißabgleichwerte zu balancieren.

2. Grundlegende Prinzipien der industriellen Kameravision
Sobald das Bild erfasst ist, kommen diese fortgeschrittenen Prinzipien zum Einsatz, um aussagekräftige Daten zu gewinnen:
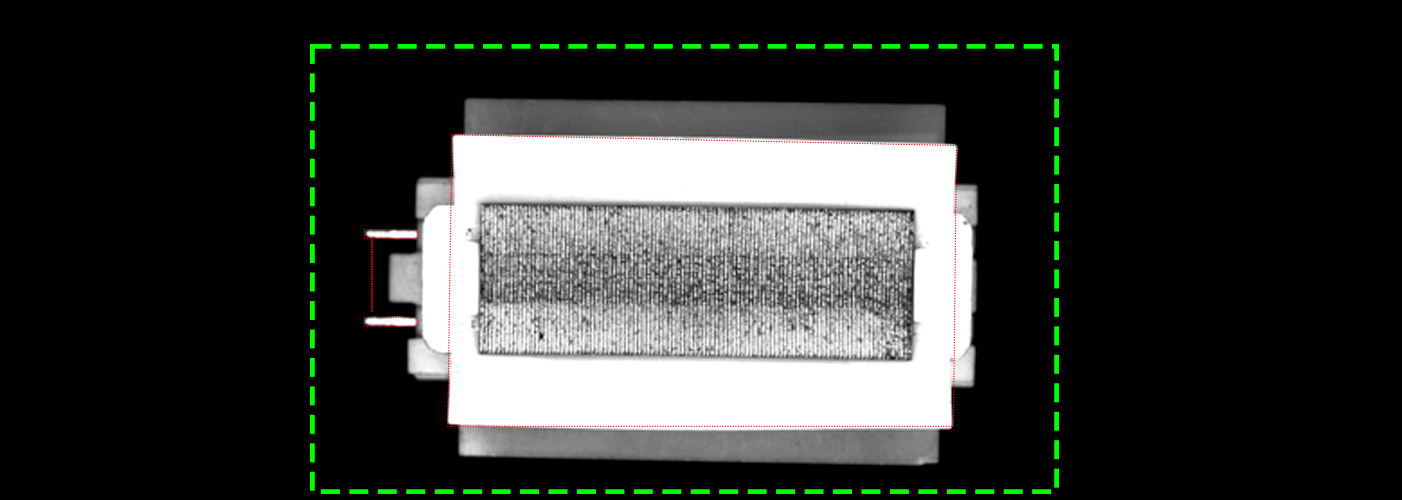
Merkmalsextraktion: Algorithmen wie der Canny-Operator für kantenerkennung oder Normalisierte Kreuzkorrelation (NCC) für Template Matching werden eingesetzt, um spezifische Ziele mit Subpixelgenauigkeit zu lokalisieren, wobei häufig eine Genauigkeit von 0,1px erreicht wird.
Verzerrungskorrektur: Um die Messgenauigkeit sicherzustellen, wird die Verzerrung mithilfe von Kalibrierungsverfahren korrigiert. Dabei werden radiale und tangentiale Verzerrungskoeffizienten (k1,k2,p1,p2) berechnet, um Messfehler innerhalb von ±0,05mm zu halten.
Bewegungskompensation: Bei sich bewegenden Objekten ist es wichtig, Unschärfe zu vermeiden. Dies wird erreicht, indem die Belichtungszeit entsprechend der Objektgeschwindigkeit angepasst wird (z. B. eine Belichtungszeit von ≤500μs bei einem Objekt, das sich mit 1m/s bewegt), und durch den Einsatz eines globalen Shutter.
3. Praktische Anwendungen von Industriekamerasystemen
Diese Prinzipien werden in verschiedenen Branchen angewandt:
Dimensionsmessung: Durch die Kalibrierung der Pixel zu einem realen Maßstab (z. B. 1 px = 0,02 mm) können diese Systeme äußerst präzise messen, mit einer Wiederholgenauigkeit von ±1 μm.
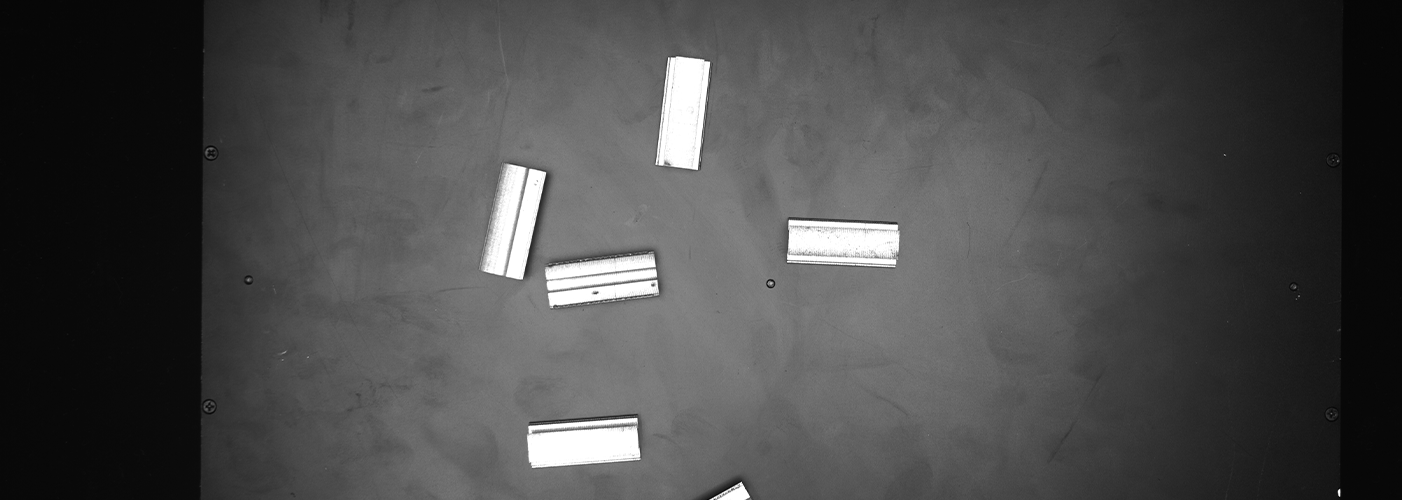
Fehlererkennung: Durch den Einsatz von Deep-Learning-Modellen wie ResNet18 , können Industriekameras Oberflächenkratzer und andere Fehler mit einer Genauigkeit von über 99,5 % klassifizieren.
Robotergesteuerte Führung: Durch Mehrpunktkalibrierung können diese Systeme Roboter führen, indem sie die Kamerakoordinaten mit geringem Fehler in das Koordinatensystem des Roboters übersetzen, oft weniger als 0,1°.