

Principe de fonctionnement d'une caméra à balayage linéaire
Le principe de fonctionnement fondamental d'une caméra à balayage linéaire est : l'utilisation d'un capteur d'image linéaire unique ou multiple, combiné au mouvement uniforme de l'objet photographié (ou de la caméra elle-même), pour collecter les données d'image ligne par ligne, et finalement les assembler en une image 2D complète.
Ses étapes principales de fonctionnement sont les suivantes :
Détection lumineuse linéaire : Le composant principal est un capteur d'image linéaire (tel que CCD ou CMOS), qui ne peut capturer qu'une information unidimensionnelle de pixels selon la direction « ligne » (horizontale), contrairement aux informations bidimensionnelles d'une caméra à balayage surfacique.
Coordination du mouvement uniforme : Un mouvement relatif uniforme et stable entre la caméra et l'objet photographié doit être assuré (par exemple, l'objet se déplace sur un tapis roulant, la caméra effectue une numérisation le long d'un rail de guidage). Cette direction de mouvement correspond à la direction « ligne » (verticale) de l'image.
Acquisition ligne par ligne et assemblage : Le capteur capture des données pixelisées unidimensionnelles ligne par ligne à une fréquence fixe (fréquence de ligne), et chaque ligne de données correspond à une nouvelle position de l'objet après déplacement ; la caméra interne ou le système backend assemble ces « images linéaires » continues dans l'ordre, et forme finalement une image 2D complète.
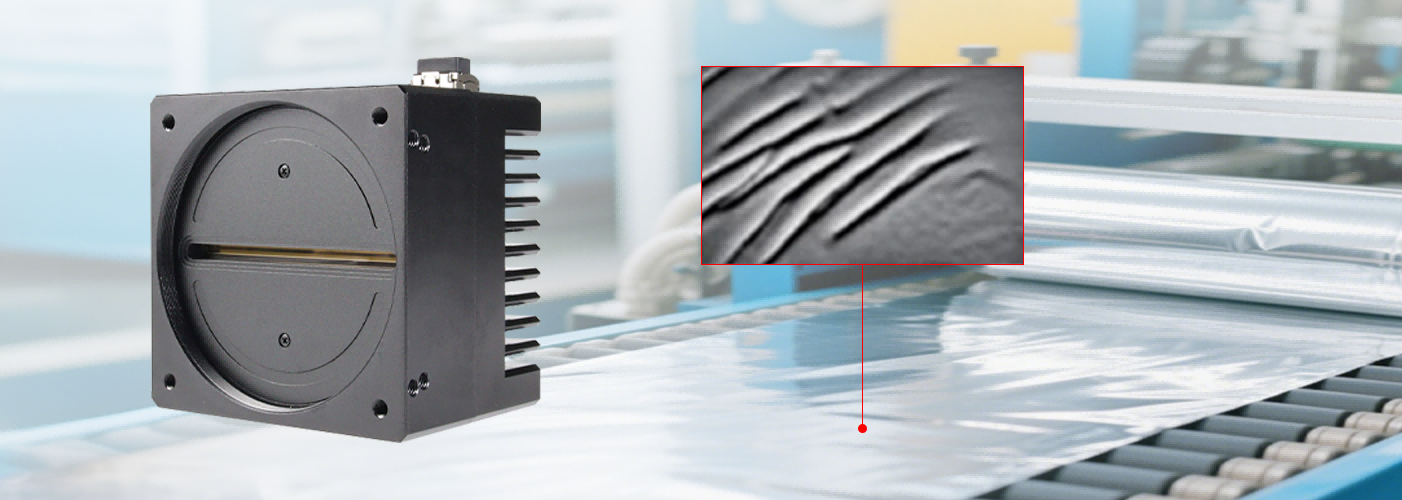
Ce principe détermine que les caméras à balayage linéaire sont plus adaptées à l'inspection d'objets à grande vitesse, de grande longueur ou de grande surface (tels que les imprimés, les plaques métalliques, les tissus, etc.) et dépendent de mécanismes de mouvement externes pour garantir la qualité de l'image.
A scénarios d'application des caméras à balayage linéaire
Les scénarios d'application principaux des caméras linéaires se concentrent sur l'imagerie haute précision et l'inspection d'objets rapides, de grande surface ou de grande longueur, et elles conviennent particulièrement aux scénarios nécessitant une acquisition dynamique continue. Les domaines typiques sont les suivants :
Domaine de l'inspection industrielle : C'est le scénario d'application principal des caméras linéaires. Elles sont utilisées pour inspecter des matériaux en mouvement continu sur les lignes de production, tels que les plaques/bobines métalliques (inspection des défauts de surface), le verre/les films (inspection de planéité et d'impuretés), les produits imprimés (précision d'enregistrement des couleurs et inspection des défauts de texte), ainsi que les électrodes de batteries lithium-ion (inspection de l'uniformité du revêtement).

Domaine de la logistique et de l'emballage : Elles servent à mesurer le volume des colis et à identifier les codes-barres/codes QR sur les lignes de tri à grande vitesse, ou à contrôler l'intégrité visuelle de produits continuellement emballés (comme les aliments emballés en sacs ou en cartons).
Domaine de l'imprimerie et de la textile : Dans les machines d'impression offset et les lignes de production de teinture/impression textile, elles effectuent un contrôle en temps réel des différences de couleur dans les motifs imprimés et des défauts de texture du tissu (comme les fils cassés et les trous) afin d'assurer la qualité de production.
Domaine du trafic et de la sécurité : Elles sont utilisées pour la numérisation du contour des véhicules aux péages autoroutiers (afin d'obtenir les données sur le modèle et les dimensions des véhicules) ou pour l'inspection des voies ferrées (pour détecter des risques cachés tels que des fissures et l'usure de la surface des rails).
Domaine médical et de la recherche scientifique : Elles sont partiellement utilisées dans l'imagerie médicale (comme l'analyse à haute résolution des coupes pathologiques), l'observation d'échantillons biologiques ou l'imagerie de balayage linéaire des tomographies industrielles (situations nécessitant une grande précision et une résolution élevée).





