Az ipari kamerák látásának megértése: alapelvek részletesen
Az ipari kamerák a gépi látás szemei, és megértésük alapvető fontosságú a teljesítmény optimalizálásához. Ez a cikk bemutatja az ipari kamerák látástechnológiájának alapjait, segítve mérnököket és rajongókat egyaránt megérteni a belső működést és rendszerük finomhangolását a siker érdekében.
1. Az ipari kamera alapvető alkatrészei
Mielőtt belevágnánk az alapelvekbe, nézzük meg az alapvető építőelemeket:
Optikai rendszer: Az objektív a fénygyűjtő szív. Rendkívül fontos megfelelő objektívet választani, amely illeszkedik az alkalmazás látószögéhez, a mélységélességhez és felbontáshoz. Például egy 5 MP-es kamera esetén szükséges egy olyan objektív, amely képes feloldani a részleteket a pixelméretig.
Érzékelő: A CMOS vagy CCD érzékelő a fényt elektromos jelekké alakítja. Kulcsfontosságú mérőszámok tartalmazza Kvantumhatásfok (QE) , amely ideális esetben 60% feletti legyen az optimális fényátalakításhoz, és Dinamikus tartomány , amelynek 70 dB feletti értékűnek kell lennie a széles fényintenzitás-tartomány kezeléséhez.
Képfeldolgozó: Ez az alkatrész végzi például a Bayer-interpoláció , zajcsökkentés , és színkorrekción , olyan algoritmusokat használva, mint például egy 3x3-as mátrix a fehéregyensúly beállításához.

2. Ipari kamerarendszerek alapelvei
Miután a kép rögzítésre került, ezek az elhaladott elvek jönnek létre, hogy értelmes adatokat nyerjenek:
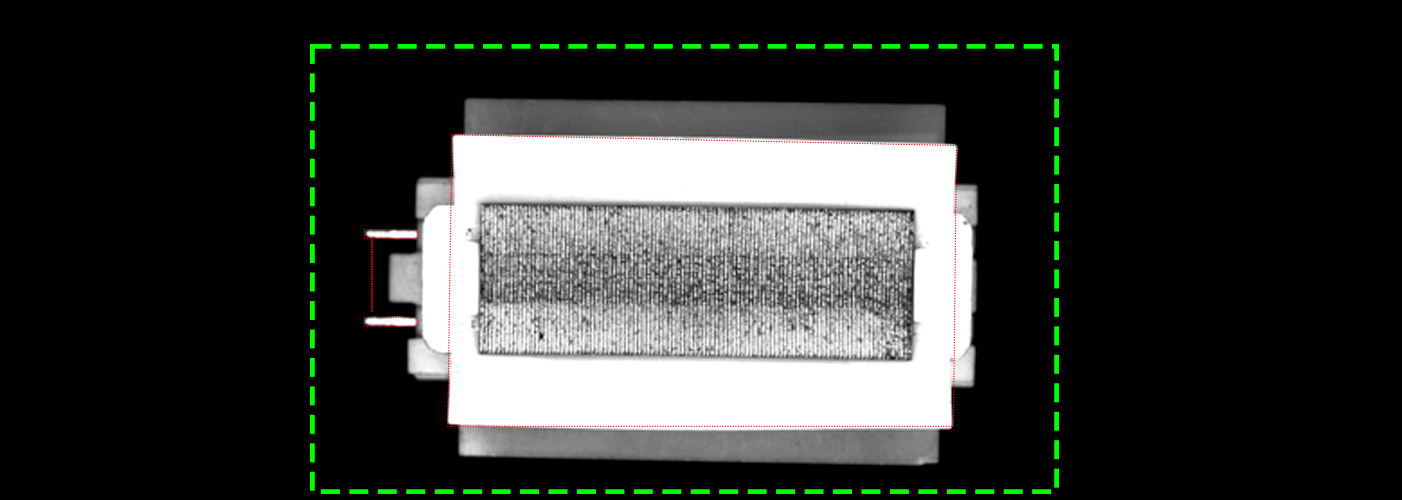
Jellemzők kinyerése: Az algoritmusok, mint például a Canny-operátor élérzékelés vagy Normalizált kereszt-korreláció (NCC) sablonhelyezéshez használják a konkrét célok helyének meghatározására szubpixeles pontossággal, amely gyakran eléri a 0,1 px pontosságot.
Torzításkorrekció: A mérési pontosság biztosítása érdekében a torzítást kalibrációs módszerekkel korrigálják. Ez kiszámítja a sugárirányú és érintőleges torzítási együtthatókat (k1,k2,p1,p2), hogy a mérési hibákat ±0,05 mm-en belül tartsa.
Mozgáskiegyenlítés: A mozgó tárgyakhoz elengedhetetlen a elmosódás megelőzése. Ezt a tárgy sebessége alapján történő expozíciós idő beállításával érik el (pl. ≤500 μs expozíciós idő 1 m/s sebességgel mozgó tárgy esetén), és globális zár használatával.
3. Ipari kamerarendszerek gyakorlati alkalmazásai
Ezeket az elveket különböző iparágakban is alkalmazzák:
Méretezési Mérések: A képpontok valós méretarányra (pl. 1 px = 0,02 mm) történő kalibrálásával ezek a rendszerek rendkívül pontos méréseket végezhetnek, ±1 μm ismételhetőséggel.
Hibafelismerés: Mélytanulási modellek, például a ResNet18 használatával ipari kamerák képesek a felületi karcolások és egyéb hibák osztályozására 99,5% feletti pontossággal.
Robotvezérlés: Többpontos kalibráció révén ezek a rendszerek kis hibával, gyakran 0,1°-nál kisebb eltéréssel képesek robotokat irányítani a kamera koordinátáinak leképezésével a robot koordinátarendszerébe.