

Gépi látás rendszerek a rendszámtábla-felismerésben
A gyors technológiai fejlődés korában a gépi látás az intelligens rendszerek alapjává vált, forradalmasítva az iparágakat oly módon, hogy lehetővé teszi a gépek számára, hogy „lássanak” és értelmezzék a vizuális adatokat. Alkalmazásai között a rendszámtábla-felismerés (LPR) egyike a leggyakoribb gyakorlati megoldásoknak, amely a rendszámtáblák rögzítését olyan eszközzé alakítja, amely egyszerűsíti a közlekedésirányítást, növeli a biztonságot, és elősegíti az okos városok fejlesztését.
1. A gépi látás elve a rendszámtábla-felismerésben
Képfelvevő
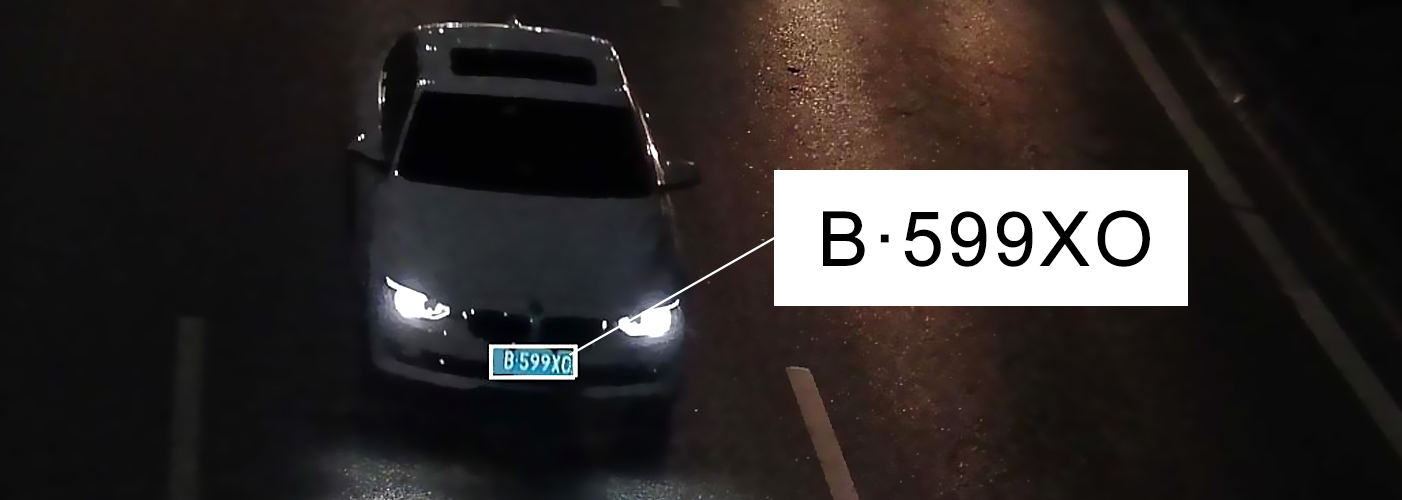
Az LPR alapját képező képrögzítés során nagy felbontású kamerákat (2–8 megapixeles) és speciális érzékelőket használnak kulcsfontosságú helyeken (kereszteződések, parkolóbejárók). Ezek az eszközök zársebességre, rekeszértékre és ISO-ra vannak kalibrálva, hogy tiszta járműképeket rögzítsenek, biztosítva, hogy a rendszámtáblák jól kivehetők legyenek a további feldolgozás során.

Kép előfeldolgozása
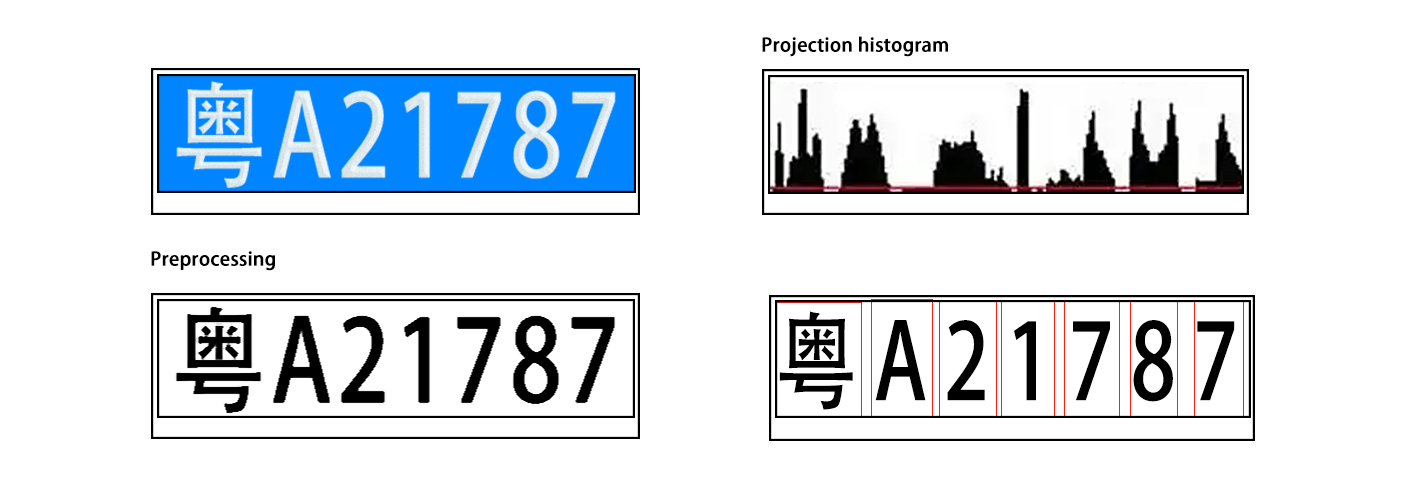
A nyers járműképek gyakran zajosak, nem egyenletes a fényerejük, és alacsony a kontrasztjuk. Az előfeldolgozás ezt az adatok egyszerűsítésével, miközben megőrzi a rendszámtábla szerkezetét (szürkeárnyalatos átalakítás), zajcsökkentéssel (Gauss/medián szűrés) és kontrasztfokozással (hisztogram-kiegyenlítés) orvosolja, így a rendszámtábla részletei jobban kiemelkednek a lokalizációhoz.
Rendszámtábla helyének meghatározása
Ez a lépés a rendszámtáblát izolálja a járműképekről annak egyedi jellemzői alapján: alak (szabványos téglalap, meghatározott oldalarány), szín (pl. kék-fehér kínai polgári gépjárműveknél) és textúra. Az éldetektálás (Canny) és a színszegmentálás együttesen működik, hogy levágja a rendszámtábla területét a irreleváns elemektől.
Karakter szegmentálás
A felismerés előkészítése érdekében a karakter szegmentálás a rendszámtábla karaktereit különálló képekre bontja. Vízszintes projekciót (függőleges karaktertartomány) és függőleges projekciót (a karakterek közötti hézagok észlelése) használ. Ferde táblák esetén torzításkorrekciót alkalmaznak, így biztosítva az egyes karakterek pontos elválasztását.
Karakterfelismerés
A fő lépés az optikai karakterfelismerést (OCR, sablonalapú összehasonlítás) vagy mélytanulást (konvolúciós neurális hálók, automatikus tanulás adathalmazokból) használja. Minden szegmentált karaktert feldolgoz, szövegként kimenetel, majd teljes rendszámot alkotva egyesít.
2. Gépi látás alkalmazása rendszámtáblák felismerésében
A közlekedés irányítása
A kereszteződésekben és autópályákon lévő LPR-rendszerek figyelik a járműveket, felismerik a rendszámokat, és összevetik a szabálysértési adatokkal. Rögzítik a rendszámokat, a szabálysértés idejét/helyét, majd továbbítják az információkat a kezelő platformokra, csökkentve ezzel a manuális munkát és javítva a közúti biztonságot.
Parkolóház-kezelés
Az LPR automatizálja a parkolási műveleteket: a kamerák rögzítik a rendszámokat a bejáratnál (belépési idő rögzítése, sorompó nyitása) és a kijáratnál (parkolási időtartam kiszámítása, díj generálása érintőmentes fizetéshez). Ez csökkenti a várakozási időt, és megszünteti a jegyhez kapcsolódó problémákat.
Díjbeszedés
Autópályákon és alagutakban az LPR lehetővé teszi a folyamatos mautóladás-t fizetést. Felismeri a rendszámokat, ellenőrzi a regisztrációt, automatikusan levonja a díjat a regisztrált járművek esetében (csökkentve a tranzakciós időt <1 másodpercre), és számlát állít ki a nem regisztrált járműveknek, enyhítve ezzel a torlódásokat.

Biztonsági és megfigyelési
A nyilvános területeken lévő kamerákba integrálva az LPR beolvassa a rendszámokat, és összeveti őket figyelőlistákkal (lopott járművek, gyanús járművek). Riasztást küld a biztonsági személyzetnek egyezés esetén, lehetővé téve a gyors reagálást és növelve a közbiztonságot.
3. Gépi látás előnyei a rendszámfelismerésben
Magas hatékonyság
A gépi látás percenként több száz képet dolgoz fel, járművenként 0,1–0,5 másodperc alatt történő felismeréssel. Az emberi operátorokkal ellentétben folyamatos teljesítményt nyújt, csökkentve a költségeket és javítva a szolgáltatás minőségét.
Magas Pontosság
A fejlett algoritmusok és MI több mint 99%-os pontosságot érnek el ideális körülmények között, illetve több mint 95%-ot nehéz körülmények között – jelentősen magasabb, mint az emberi felismerés (5% feletti hibarátával). Ez megbízhatóságot biztosít a mautóladás-fizetésben és a biztonsági alkalmazásokban.
folyamatos működés
Alacsony fényviszonyokhoz alkalmazkodó szenzorokkal és időjárásálló kamerákkal felszerelt rendszer, amely folyamatosan működik. Infravörös/LED világítás segíti a felvételt éjszaka, és javító algoritmusok csökkentik az időjárási viszonyok hatását, így biztosítva a megszakításmentes működést.
Adatkezelés és elemzés
A felismerés eredményei (rendszám, időpont, helyszín, képek) központosított adatbázisban tárolódnak gyors keresés céljából. Az adatok elemzése lehetővé teszi a tendenciák azonosítását – a forgalomirányítás optimalizálását, a parkolási díjak módosítását vagy gyanús járművek nyomon követését.
4. Kihívások és megoldások a gépi látáson alapuló rendszámtáblafelismerésben
Könnyebb környezetekben
Extrém időjárási viszonyok (eső, köd, tükröződés), megváltozott megvilágítás és elkopott rendszámok pontosságát súlyos esetekben <80%-ra csökkenthetik, így rontva a megbízhatóságot.

Összetett járműforgalmi helyzetek
Takarás (letakart rendszám), dőlés/torzítás és több rendszámtábla egyidejű jelenléte zavarja a felismerést, mivel a hagyományos algoritmusok nehezen birkóznak meg nem szabványos bemenetekkel.
Megoldások és fejlesztések
A hardveroptimalizálás (HDR kamerák, infravörös világítás) és az algoritmusfejlesztések (adaptív zajcsökkentés, ködeltávolítás) kezelik a környezeti problémákat. A ferdeségi korrekció, takaráskezelés és mélytanulás (régióalapú konvolúciós neuronhálók) bonyolult jelenetekkel foglalkozik. A rendszeres karbantartás és frissítések pontos működést biztosítanak.
5. A gépi látás jövőbeli trendjei a rendszám-felismerésben
Mélytanulás és MI-integráció
Korszerű modellek (transzformerek, kevés példán alapuló tanulás) kezelik a nehéz eseteket (kopott rendszámok). Végponttól végpontig tartó LPR-rendszerek (egyetlen neurális hálózat minden lépéshez) leegyszerűsítik a tervezést, és az MI előrejelzi a járművek viselkedését proaktív menedzsment céljából.
Többérzékelős fúzió
Az LPR integrálni fogja a LiDAR-t (3D járműadatok), radarokat (sebesség/távolság) és termográfiai kamerákat (sötét/ködös körülmények). Az adatfúzió csökkenti a hibákat, így a rendszerek robosztusabbá válnak terepen és vészhelyzetekben is.
Felhőalapú szolgáltatások
A felhőalapú LPR skálázhatóságot biztosít (kamerák hozzáadása hardverfrissítés nélkül), távoli kezelést és rendszerek közötti integrációt (adatmegosztás okos városi platformokkal). A felhőtárolás támogatja a nagy léptékű alkalmazások hosszú távú elemzését.
6. Összegzés
A gépi látás a modern LPR alapja, amely gyorsasággal, pontossággal és folyamatos működéssel oldja meg a kézi rendszerek problémáit. A mélytanulás, a többszenzoros fúzió és a felhőtechnológia fejlődése leküzdheti a kihívásokat. Ahogy az okos városok növekednek, az LPR kulcsszerepet fog játszani a járművek, az infrastruktúra és a felhasználók összekapcsolásában, formálva az intelligens közlekedést.





