

Visi Mesin dalam Pengenalan Pelat Nomor
Di era kemajuan teknologi yang pesat, visi mesin telah menjadi inti dari sistem cerdas, merevolusi berbagai industri dengan memungkinkan mesin untuk "melihat" dan menafsirkan data visual. Dari berbagai aplikasinya, pengenalan pelat nomor (LPR) merupakan salah satu penerapan yang paling praktis, mengubah penangkapan pelat nomor menjadi alat yang menyederhanakan manajemen lalu lintas, meningkatkan keamanan, dan mendorong pengembangan kota pintar.
1. Prinsip Visi Mesin dalam Pengenalan Pelat Nomor
Pengambilan gambar
Sebagai fondasi LPR, akuisisi gambar menggunakan kamera definisi tinggi (2–8 megapiksel) dan sensor khusus yang dipasang di lokasi-lokasi strategis (persimpangan jalan, pintu masuk parkir). Perangkat-perangkat ini dikalibrasi untuk kecepatan rana, aperture, dan ISO agar dapat menangkap gambar kendaraan dengan jelas, memastikan pelat nomor dapat dibedakan untuk pemrosesan selanjutnya.

Pra-pemrosesan Gambar
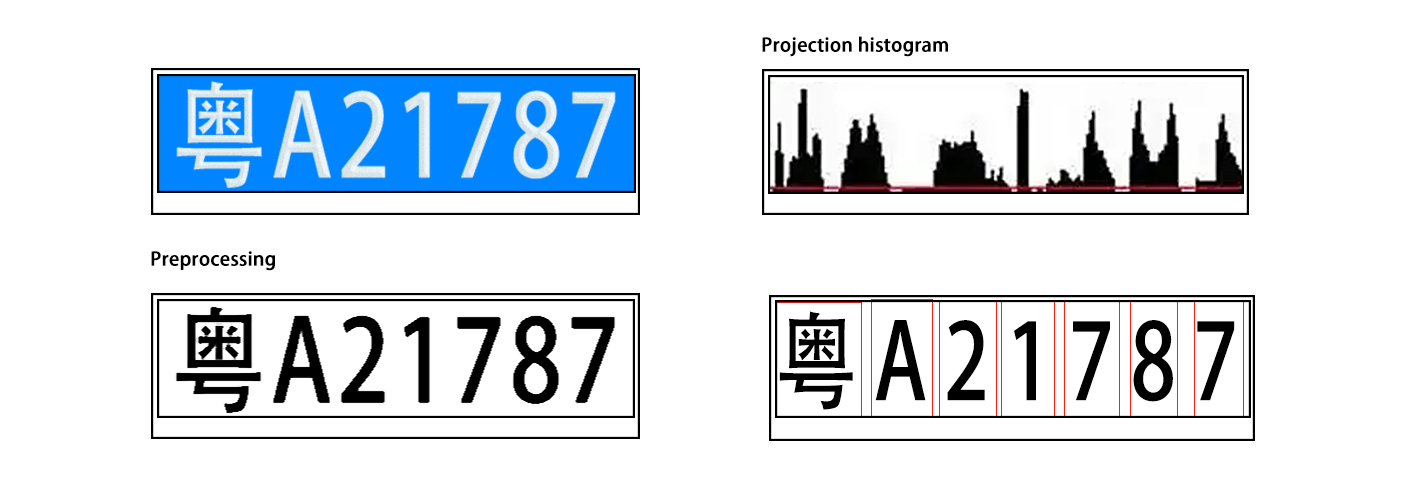
Gambar kendaraan mentah sering kali memiliki noise, kecerahan tidak merata, dan kontras rendah. Pra-pemrosesan memperbaiki hal ini melalui konversi ke skala keabuan (menyederhanakan data sambil mempertahankan struktur pelat), pengurangan noise (filter Gaussian/median), dan peningkatan kontras (equalisasi histogram), sehingga detail pelat menjadi lebih jelas untuk proses penentuan lokasi.
Penentuan Lokasi Pelat Nomor
Langkah ini mengisolasi pelat nomor dari gambar kendaraan menggunakan fitur uniknya: bentuk (persegi panjang standar dengan rasio aspek tetap), warna (misalnya biru-putih untuk mobil sipil di Tiongkok), dan tekstur. Deteksi tepi (Canny) dan segmentasi warna bekerja bersama untuk memotong area pelat dari elemen-elemen yang tidak relevan.
Segmentasi Karakter
Untuk persiapan pengenalan, segmentasi karakter memisahkan huruf-angka pada pelat menjadi gambar-gambar individual. Metode ini menggunakan proyeksi horizontal (rentang vertikal karakter) dan proyeksi vertikal (mendeteksi celah antar karakter). Koreksi kemiringan diterapkan pada pelat yang miring, memastikan pemisahan setiap karakter secara akurat.
Pengenalan karakter
Langkah inti menggunakan Pengenalan Karakter Optik (OCR, perbandingan berbasis templat) atau pembelajaran mendalam (CNN, pembelajaran otomatis dari kumpulan data). Setiap karakter yang tersegmentasi diproses, dihasilkan sebagai teks, dan digabungkan menjadi nomor pelat nomor lengkap.
2. Aplikasi Visi Mesin dalam Pengenalan Pelat Nomor
Manajemen Lalu Lintas
Sistem LPR di persimpangan dan jalan raya memantau kendaraan, mengenali pelat nomor, dan mencocokkannya dengan data pelanggaran. Sistem ini menangkap pelat nomor, mencatat waktu/lokasi pelanggaran, serta mengirimkan informasi ke platform manajemen, mengurangi pekerjaan manual dan meningkatkan keselamatan jalan.
Manajemen tempat parkir
LPR mengotomatisasi operasi parkir: kamera menangkap pelat nomor saat masuk (mencatat waktu masuk, membuka palang) dan saat keluar (menghitung durasi, menghasilkan biaya untuk pembayaran tanpa uang tunai). Hal ini mengurangi waktu tunggu dan menghilangkan masalah terkait tiket.
Pengumpulan Tol
Di jalan raya dan terowongan, LPR memungkinkan pengumpulan tol tanpa henti. Sistem ini mengenali pelat nomor, memeriksa registrasi, serta secara otomatis memotong biaya untuk kendaraan terdaftar (mengurangi waktu transaksi menjadi <1 detik), dan menghasilkan tagihan untuk kendaraan yang tidak terdaftar, sehingga mengurangi kemacetan.

Keamanan dan Pengawasan
Terintegrasi ke dalam kamera area publik, LPR memindai pelat nomor dan mencocokkannya dengan daftar pantauan (kendaraan curian, kendaraan mencurigakan). Sistem ini memberi peringatan kepada petugas keamanan saat terjadi kecocokan, memungkinkan respons cepat dan meningkatkan keselamatan publik.
3. Keunggulan Visi Mesin dalam Pengenalan Plat Nomor
Efisiensi Tinggi
Visi mesin memproses ratusan gambar per menit, dengan waktu pengenalan 0,1–0,5 detik per kendaraan. Berbeda dengan operator manual, sistem ini menjaga alur kerja yang konsisten, mengurangi biaya, dan meningkatkan layanan.
Akurasi Tinggi
Algoritma canggih dan kecerdasan buatan memungkinkan akurasi lebih dari 99% dalam kondisi ideal, dan >95% di lingkungan yang menantang—jauh lebih tinggi dibanding pengenalan manual (tingkat kesalahan 5%+). Hal ini menjamin keandalan dalam pembayaran tol dan keamanan.
operasi 24/7
Dilengkapi sensor cahaya rendah dan kamera tahan cuaca, LPR beroperasi tanpa henti. Pencahayaan inframerah/LED membantu penangkapan gambar di malam hari, dan algoritma peningkatan mengurangi dampak cuaca, memastikan operasi terus-menerus.
Pengelolaan dan Analisis Data
Hasil pengenalan (nomor plat, waktu, lokasi, gambar) disimpan dalam basis data terpusat untuk pencarian cepat. Data dianalisis untuk mengidentifikasi tren—mengoptimalkan sinyal lalu lintas, menyesuaikan harga parkir, atau melacak kendaraan mencurigakan.
4. Tantangan dan Solusi dalam Pengenalan Plat Nomor Berbasis Visi Mesin
Menantang
Cuaca ekstrem (hujan, kabut, silau), perubahan pencahayaan, dan plat yang aus mengurangi akurasi hingga <80% dalam kasus parah, memengaruhi keandalan.

Skenario Kendaraan yang Kompleks
Oklusi (plat terhalang), kemiringan/distorsi, dan skenario multi-plat mengganggu pengenalan, karena algoritma tradisional kesulitan menghadapi masukan yang tidak standar.
Solusi dan Perbaikan
Optimalisasi perangkat keras (kamera HDR, pencahayaan inframerah) dan peningkatan algoritma (pengurangan noise adaptif, penghilangan kabut) mengatasi masalah lingkungan. Koreksi kemiringan, penanganan oklusi, dan deep learning (CNN berbasis wilayah) menangani skenario kompleks. Pemeliharaan rutin dan pembaruan menjaga akurasi sistem.
5. Tren Masa Depan Visi Mesin dalam Pengenalan Plat Nomor
Integrasi Deep Learning dan AI
Model canggih (transformer, pembelajaran few-shot) menangani kasus sulit (pelat yang aus). Sistem LPR end-to-end (satu jaringan saraf untuk semua langkah) menyederhanakan desain, dan AI memprediksi perilaku kendaraan untuk manajemen proaktif.
Fusi Multisensor
LPR akan mengintegrasikan LiDAR (data kendaraan 3D), radar (kecepatan/jarak), dan kamera termal (kondisi gelap/berasap). Fusi data mengurangi kesalahan, sehingga sistem lebih andal untuk penggunaan off-road dan darurat.
Layanan Berbasis Cloud
LPR berbasis cloud menawarkan skalabilitas (penambahan kamera tanpa upgrade perangkat keras), manajemen jarak jauh, serta integrasi lintas sistem (berbagi data dengan platform kota cerdas). Penyimpanan cloud mendukung analisis jangka panjang untuk aplikasi skala besar.
6. Kesimpulan
Visi mesin adalah tulang punggung LPR modern, yang mengatasi kelemahan sistem manual dengan kecepatan, akurasi, dan operasi 24/7. Kemajuan dalam pembelajaran mendalam, fusi multimodal sensor, dan teknologi cloud mampu mengatasi berbagai tantangan. Seiring berkembangnya kota cerdas, LPR akan memainkan peran utama dalam menghubungkan kendaraan, infrastruktur, dan pengguna, membentuk transportasi cerdas.





