

Consigli per l’integrazione di telecamere a livello di scheda per ingegneri
Scelta dell’interfaccia appropriata per l’integrazione della telecamera a livello di scheda
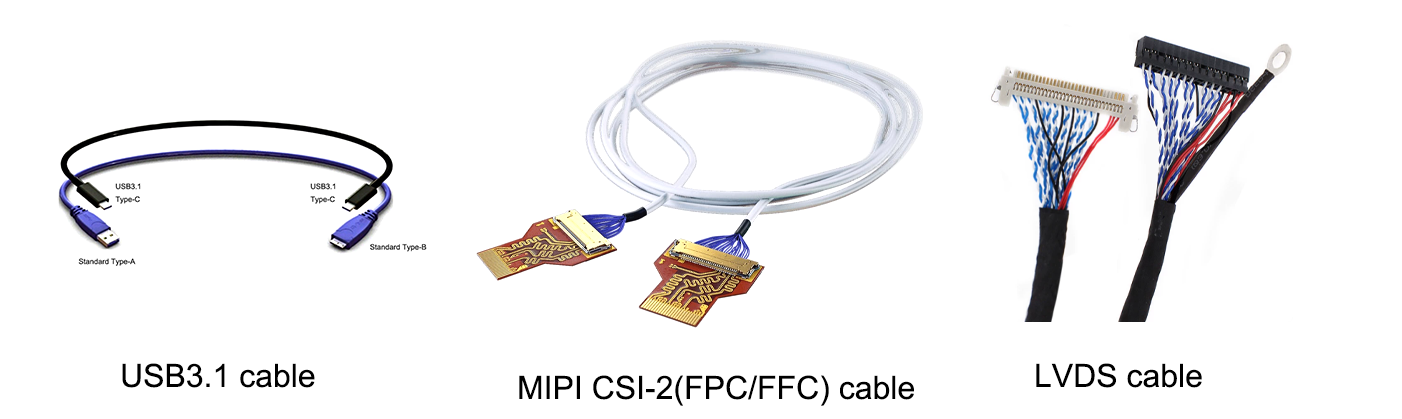
USB 3.1, MIPI CSI-2 e LVDS: compromessi tra larghezza di banda, latenza e sincronizzazione in tempo reale
Gli ingegneri embedded devono affrontare scelte critiche tra compromessi quando selezionano le interfacce per l’integrazione di telecamere a livello di scheda. USB 3.1 offre un’alta larghezza di banda (5 Gbps), rendendola adatta allo streaming video HD, ma il sovraccarico del protocollo introduce una latenza di 5–10 ms, limitandone l’idoneità per loop di controllo in tempo reale. MIPI CSI-2 offre una larghezza di banda scalabile (fino a 6 Gbps per linea) e una sincronizzazione hardware attivata da trigger, consentendo una latenza inferiore al millisecondo e una temporizzazione precisa tra più sensori: ideale per l’automazione industriale e la robotica. LVDS fornisce una trasmissione deterministica e a latenza ultra-bassa (<1 ms) tramite semplici protocolli seriali, sebbene la larghezza di banda per canale sia limitata a circa 655 Mbps, restringendone l’uso a flussi a bassa risoluzione o compressi. I sistemi di visione che richiedono una sincronizzazione stretta tra telecamere dovrebbero privilegiare MIPI CSI-2; applicazioni critiche per la sicurezza, come la percezione nei veicoli autonomi, traggono vantaggio dalla prevedibilità temporale di LVDS. USB 3.1 rimane una soluzione valida per il monitoraggio HD non in tempo reale e sensibile ai costi, purché la latenza minima sia accettabile e i vincoli termici e di elaborazione siano stati verificati.
Best practice per l'integrità del segnale e il layout delle PCB da parte di Interface
L'integrità del segnale è specifica dell'interfaccia ed è fondamentale per garantire prestazioni affidabili delle telecamere a livello di scheda. Per USB 3.1, mantenere un'impedenza differenziale di 90 Ω con coppie di tracce di lunghezza abbinata (±5 mil), routing schermato a massa e rigorosa separazione dalle tracce digitali rumorose per sopprimere le interferenze elettromagnetiche (EMI). MIPI CSI-2 richiede un’impedenza di 100 Ω per ogni linea differenziale, l’abbinamento della lunghezza entro ±10 mil e l’evitare l’uso di via vicino ai ricevitori—aspetto particolarmente critico per le linee ad alta velocità che operano a frequenze superiori a 1,5 Gbps. Le disposizioni LVDS richiedono tracce corte (<10 pollici), impedenza costante di 100 Ω e tracce di guardia per ridurre il diafonia. Per tutte le interfacce, suddividere i piani di massa al fine di isolare i circuiti analogici del sensore dai domini digitali dell’ISP e del processore, posizionare i condensatori di disaccoppiamento entro 2 mm dai pin di alimentazione e utilizzare stackup a 4 o più strati con piani di riferimento continui. Un routing non corretto è responsabile del 32% degli artefatti visivi nei sistemi di visione prototipali—rendendo quindi la simulazione post-layout e la validazione dell’impedenza obbligatorie per progetti critici per la missione.
Integrazione meccanica: montaggio dell'obiettivo e flessibilità ottica
Il montaggio preciso delle lenti è essenziale: allineamenti errati su scala micrometrica causano deriva del fuoco, distorsioni o perdita di risoluzione. Gli ingegneri devono bilanciare la rigidità meccanica—fondamentale per la resistenza a urti e vibrazioni—con la regolabilità in campo, generalmente ottenuta mediante barre filettate o supporti a spessori. La flessibilità ottica richiede compatibilità con diversi tipi di lenti (a fuoco fisso, varifocali, liquide) e il supporto della regolazione della lunghezza focale tramite meccanismi elicoidali o controller motorizzati. Le differenze di espansione termica tra lenti e sensori richiedono misure di mitigazione—ad esempio l’uso di materiali con basso coefficiente di espansione termica (CTE), come l’Invar o compositi ceramici, oppure supporti cinematici—soprattutto negli ambienti industriali (-40 °C ÷ +85 °C). Per l’imaging infrarosso o multispettrale, la trasparenza del materiale del substrato nella banda target (ad esempio il germanio per l’LWIR, la silice fusa per l’UV) diventa un vincolo progettuale primario. Interfacce modulari per le lenti consentono lo scambio rapido senza necessità di una nuova calibrazione completa, ma le tolleranze della distanza dal piano di riferimento (flange distance) devono rimanere inferiori a 10 µm per evitare vignettatura o degrado della funzione di trasferimento modulare (MTF).

Garantire una coesistenza robusta a livello di sistema nelle progettazioni di telecamere a livello di scheda
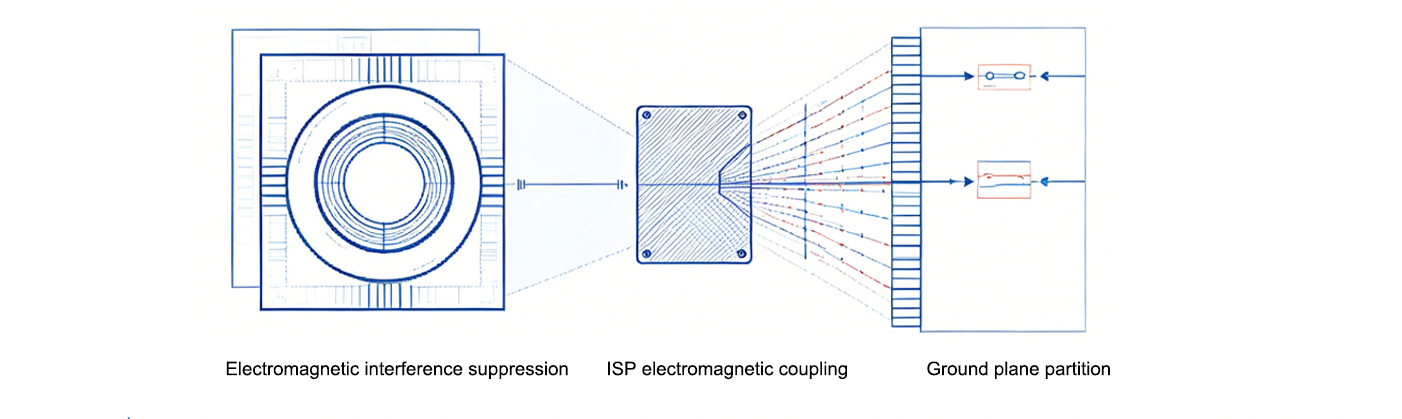
Mitigazione delle interferenze elettromagnetiche (EMI) e suddivisione del piano di massa per la coesistenza tra sensore e ISP
I design di fotocamere a livello di scheda privi di involucro non dispongono della schermatura EMI dei moduli chiusi, il che comporta una maggiore responsabilità a livello di isolamento sulla scheda a circuito stampato (PCB) tra sensori d’immagine e processori d’immagine (ISP). Piani di massa suddivisi — che separano i domini analogici dei sensori dai sottosistemi digitali dell’ISP — sono essenziali per ridurre al minimo l’accoppiamento di rumore condotto, poiché le interferenze in ambito mixed-signal possono introdurre armoniche di clock superiori a 50 dBμV/m (IEC 61000-4-3). Tra le strategie efficaci rientrano: il collegamento a stella della massa all’ingresso dell’alimentazione, tracce di guardia con via di connessione (stitching vias) intorno alle reti digitali ad alta velocità, l’evitare rilievi termici (thermal reliefs) nelle aree di massa (ground pours) vicino ai sensori e l’inserimento di perle ferrite sulle linee di clock I²C. L’integrità del segnale peggiora rapidamente quando la distanza tra sensore e ISP scende al di sotto di 3λ della massima frequenza operativa — rendendo pertanto necessario un routing con impedenza controllata e coppie differenziali con lunghezza abbinata. La prototipazione precoce con sonde EMI a campo vicino (spaziatura di 5 mm) consente di identificare i punti critici (hotspot); una schermatura localizzata in mu-metal sui sensori riduce le emissioni irradiate di 12–18 dB (FCC OET-65). Il mantenimento di una distanza minima di ≥40 mil tra i domini mixed-signal migliora costantemente il rapporto segnale-rumore (SNR) del 20% nei moduli ad alta risoluzione.
Integrazione software e portabilità dell'SDK per telecamere a livello di scheda
Supporto driver multipiattaforma: Linux RT, QNX e RTOS bare-metal con Spinnaker
La portabilità del software su piattaforme multiple è indispensabile per le implementazioni di visione embedded che operano su ambienti Linux in tempo reale (RT), QNX e RTOS bare-metal con risorse limitate. Ciascun sistema operativo impone requisiti distinti in termini di tempistica, memoria e modello di driver; tuttavia, devono essere preservati l’acquisizione pixel-perfect e la sincronizzazione attivata via hardware. Un livello di astrazione SDK unificato colma questa lacuna: ad esempio, l’SDK Spinnaker fornisce API standardizzate su piattaforme x86, ARM e RISC-V, supportando nativamente l’acquisizione frame in tempo reale, l’attivazione hardware e l’accesso ai registri dell’ISP. Ciò elimina lo sviluppo ridondante di driver durante la migrazione da PC industriali Linux RT a target RTOS basati su microcontrollore. I team che utilizzano tali framework riducono i tempi di integrazione fino al 40%, mantenendo comunque un comportamento deterministico, anche in condizioni di derating termico o scalatura della tensione.
Pronto a semplificare l’integrazione della tua fotocamera a livello di scheda per la produzione OEM?
Senza Saldature integrazione della fotocamera a livello di scheda è la pietra angolare dei sistemi di visione embedded affidabili e ad alte prestazioni: nessun algoritmo avanzato né alcun hardware di elaborazione possono compensare una scelta inadeguata dell’interfaccia, difetti di integrità del segnale o una progettazione meccanica non ottimizzata. Seguendo le migliori pratiche di integrazione validate sul campo e collaborando con un fornitore di telecamere che offre hardware pre-convalidato, supporto per progetti di riferimento e strumenti software multi-piattaforma, si riducono le iterazioni di progettazione, si accelera il time-to-market e si ottengono prestazioni costanti ed economicamente vantaggiose nella produzione OEM su larga scala.
Per soluzioni industriali di telecamere a livello di scheda personalizzate per la vostra applicazione di visione embedded, oppure per accedere a pacchetti completi di progettazione di riferimento, supporto ingegneristico interno e servizi di produzione OEM su misura (offerti da HIFLY), collaborare con un fornitore con consolidata esperienza nel settore della visione artificiale industriale. I 15 anni di esperienza di HIFLY coprono la progettazione di telecamere a livello di scheda, la personalizzazione completa OEM/ODM e l’integrazione end-to-end di sistemi di visione embedded—garantiti dalla certificazione ISO 9001:2015, dal supporto alla conformità alle normative internazionali e da servizi ingegneristici dedicati per l’ingresso nel design. Contattateci oggi stesso per una consulenza senza impegno, per la realizzazione di prototipi personalizzati o per ottimizzare il vostro flusso di lavoro di integrazione delle telecamere a livello di scheda.





