

マシンビジョン輪郭検出
産業4.0およびスマートオートメーションの時代において、マシンビジョンはコア技術となっており、マシンに「視覚」を持たせ、人間の能力を超える精度で視覚データを解釈することが可能になっています。その主な機能の中には、次のような重要な機能が含まれます。 境界線検出 輪郭検出が重要です。これはデジタル画像から対象物の境界形状を抽出し、対象物認識、寸法測定、欠陥検査、ロボット操作などの作業の基盤を形成します。
1. 輪郭検出とは何か?
画像処理における「輪郭(コンター)」とは、同じ輝度または色を持つ連続する点(対象物の境界上にある点)をつなげる曲線のことで、対象物を背景から分離します。エッジ(画素レベルでの明暗の遷移)とは異なり、輪郭は連続的なループ(または部分的な対象物のための開いた曲線)で表され、対象物の 形状 外形を示しており、単なる輝度変化の一点だけではありません。
輪郭検出の主な目的は、画像データを簡略化することです。2次元画像を1次元の輪郭線にまで縮減することで、マシンが各ピクセルを処理することなく対象の幾何学的特徴(サイズ、角度、対称性など)を効率的に分析できるようになります。これは、速度と精度の両方が重要なリアルタイムアプリケーションにおいて不可欠です。
2. 基本原理
輪郭検出は、2つの主要なステップに基づいています。 前処理 (対象と背景のコントラストの強化)および 輪郭抽出 (境界点の特定)です。これらのステップにより、ノイズ、照度の不均一、コントラストの低さなど、境界を曖昧にするような生画像上の欠点に対処します。
2.1 前処理
生画像には明確な境界がほとんど存在しないため、前処理は非常に重要です:
グレースケール変換 : 多くのアルゴリズムはシングルチャネルのグレースケール画像を使用します(RGBの3チャネルから1チャネルにデータを簡略化し、色は多くの場合関係ないため)
騒音削減 : ガウシアンブラーはガウシアンカーネルを使用して画像を滑らかにし、高周波ノイズを除去しながら主要な輝度変化を保持します。これはセンサー干渉や照明の変動による誤ったエッジを避けるために重要です。
エッジ検出 : 輪郭を形成するピクセルレベルでの輝度変化(エッジ)を検出します。 キャニー・エッジ検出器 (平滑化、勾配計算、非最大値抑制、ヒステリシス閾値処理という多段階の方法)は、細く連続したエッジを生成するための基準となる方法です。ソーベルオペレータは水平/垂直方向のエッジを強調し、太い境界に適しています。
閾値処理 : グレースケールのエッジマップをバイナリ(白黒)画像に変換し、前景(オブジェクトのエッジ)を1、背景を0とすることで輪郭抽出を簡略化します。
2.2 輪郭抽出
前処理後、アルゴリズムは接続された前景ピクセルをたどって輪郭を形成します。 フリーマンチェインコード 広く利用されています。これは、輪郭を前のピクセルに対する方向コード(上、下、左、右)として表現し、ストレージを削減し、形状の比較を容易にします。OpenCVなどのライブラリはfindContours()のような関数でこれを簡略化し、輪郭のピクセル座標を返し、面積やアスペクト比によるフィルタリングを可能にし、ノイズを除去できます。

3. 高度な技術
従来の方法はコントロールされた高コントラスト環境には有効ですが、実際のシナリオ(照明が均等でない、物が重なっている)では高度なアプローチが必要です。
適応的閾値処理 :各ピクセルに対してグローバルな単一の閾値ではなく、ローカルな閾値を計算します。照明が変化する画像(例:工場の照明下での工業部品)に最適です。
ディープラーニングベースの検出 :畳み込みニューネットワーク(CNN)は、手動での前処理を必要とせず、直接画像から境界を抽出します。次のようなモデルがあります。 HED(Holistically-Nested Edge Detector) および RCF(Richer Convolutional Features) 高解像度エッジマップのために多スケールCNN特徴を融合し、複雑なシーン(医用画像、混雑した環境)で優れた性能を発揮します。
4. 主な課題
進歩にもかかわらず、現実世界には依然として障壁があります:
ノイズと照明 :工場の床、暗所、屋外環境ではエッジが途切れたり誤検出されたりします。
重なった/隠れた物体 :積み重なった部品のエッジが結合し、個々の形状が識別しにくくなります。
透明/反射材質 :ガラスや金属が光を散乱し、エッジが弱く歪んで見えることがあります。
リアルタイムパフォーマンス :産業用途(ライン検査)では1秒間に30フレーム以上(FPS)が必要です。ディープラーニングモデルは速度要件を満たすために最適化(量子化、GPUハードウェアアクセラレーション等)が必要です。
5. 実際の応用
輪郭検出が各業界の自動化を推進:
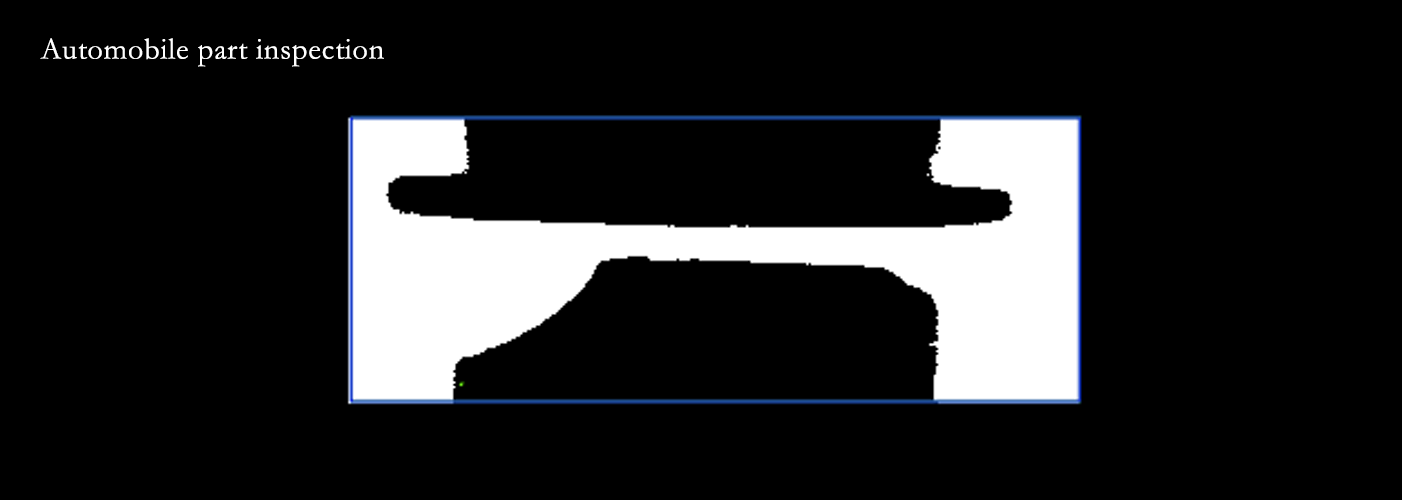
産業品質検査 : 製造業における欠陥(ひび割れ、へこみ)の検出。例えば、自動車生産ではエンジン部品(ギア、ガスケット)が設計された輪郭と一致するかを確認し、許容誤差外の部品を排除します。
ロボットによるピック&プレース : ロボットが物体の位置を把握するのを支援します。倉庫内では、ロボットアームがコンベア上のパッケージの輪郭を使用して位置と方向を検知し、グリップを調整します。
市場の継続的な拡大により、 : 解剖学的構造(CTスキャンでの腫瘍、組織学的スライドでの細胞境界)をセグメント化し、診断を支援します。ディープラーニングモデルは変動のある生体組織にも適応できます。
農業 : 輪郭分析により果物(リンゴ、オレンジ)をサイズ・熟度で分類し、葉の輪郭の変化から作物の病気を検出します。
交通監視 : 車両を追跡し、交通量を測定したり、監視カメラを使用して異常な輪郭や停止した物体から事故を識別します。
6. 今後のトレンド
3つのトレンドが輪郭検出を形作るでしょう:
エッジAI統合 :軽量モデル(量子化CNN)をエッジデバイス(産業用カメラ、ドローン)に実装することで、クラウドに依存せずにリアルタイム処理を実現します。これは自律型ロボットにとって極めて重要です。
マルチモーダル融合 :視覚データとLiDAR/サーマルイメージングを統合することで、厳しい環境条件下でも検出性能を向上させます(例:サーマルイメージングは暗所での境界線を明確にし、LiDARは重なった物体に対する3Dの奥行き情報を提供します)。
説明可能なAI(XAI) :XAI技術により、ディープラーニングモデルが輪郭をどのように検出しているかを明確にし、医療診断や航空宇宙検査など信頼性が重要な分野での活用を後押しします。
結論
マシンビジョンにおける輪郭検出は、生の画像データから実用的な洞察へとつなぎ、自動化および品質管理を支える技術です。従来のエッジ検出からディープラーニングまで進化し、複雑な課題に対応してきました。技術が進歩し続ける中で、スマートシステムの核として存在感を増し、産業横断的に機械をより capable かつ信頼できるものにしています。





