

Machine Vision Contour Detectie
In de tijd van Industrie 4.0 en slimme automatisering is machinevisie een kerntechnologie geworden, waardoor machines "kunnen zien" en visuele gegevens nauwkeurig kunnen interpreteren, vaak met een precisie die de menselijke waarneming overtreft. Binnen haar belangrijkste functies speelt contourdetectie een cruciale rol: deze haalt de vormen van objectranden uit digitale afbeeldingen en vormt daarmee de basis voor taken zoals objectherkenning, afmetingenmeting, defectinspectie en robotmanipulatie.
1. Wat is contourob detection?
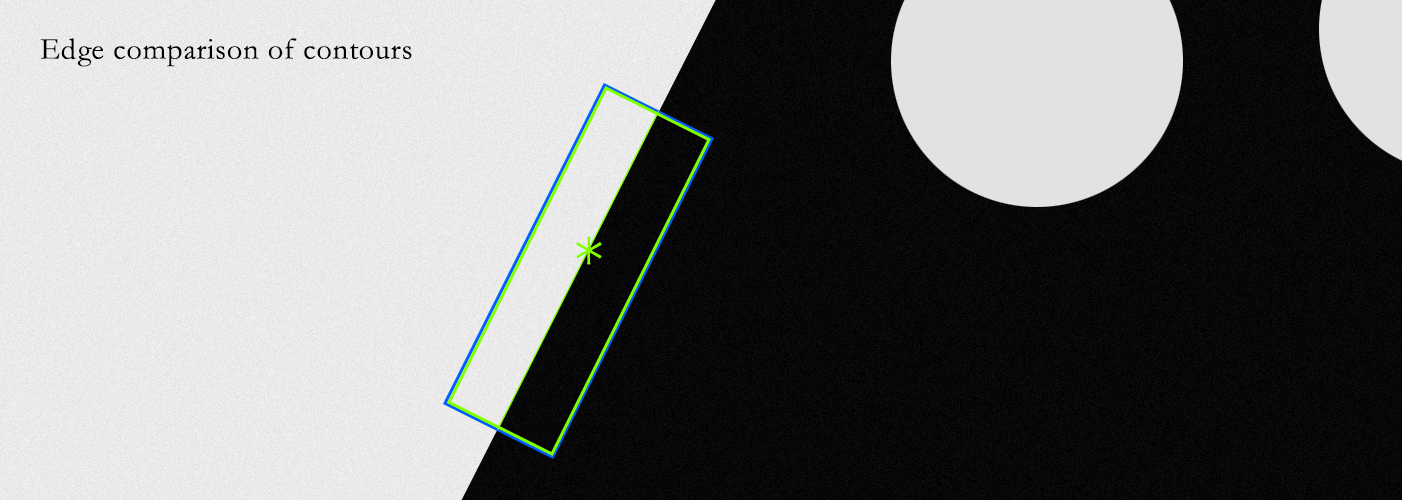
Een "contour" in beeldverwerking is een curve die continue punten (langs de rand van een object) met dezelfde intensiteit of kleur met elkaar verbindt, en daarmee het object scheidt van zijn achtergrond. In tegenstelling tot discrete randen (pixelniveau-overgangen van licht naar donker), zijn contouren continue lussen (of open curves voor gedeeltelijke objecten) die het object voorstellen, vorm niet alleen geïsoleerde intensiteitsveranderingen.
Het hoofddoel van contourob detection is het vereenvoudigen van beelddata: het reduceren van een 2D-afbeelding tot 1D-contouren laat machines efficiënt de geometrie van een object (grootte, hoeken, symmetrie) analyseren, zonder dat elk pixel hoeft te worden verwerkt — essentieel voor real-time toepassingen waarbij snelheid en nauwkeurigheid beide belangrijk zijn.
2. Kernprincipes
Contourob detection maakt gebruik van twee sleutelstappen: preprocessing (verbetering van het contrast tussen object en achtergrond) en contourextractie (identificatie van randpunten). Deze stappen lossen problemen in ruwe afbeeldingen op, zoals ruis, ongelijke verlichting of laag contrast die grenzen onduidelijk maken.
2.1 Preprocessing
Ruwe afbeeldingen hebben zelden duidelijke grenzen, dus preprocessing is van groot belang:
Grijswaardeconversie : De meeste algoritmen gebruiken enkelkanaals grijswaardenbeelden (vereenvoudiging van gegevens van drie RGB-kanalen naar één, aangezien kleur vaak irrelevant is).
Geruisreductie : Gaussisch vervagen smoothen beelden met een Gaussische kern, het verminderen van hoogfrequente ruis terwijl belangrijke intensiteitsverschuivingen behouden blijven - cruciaal om valse randen te voorkomen door sensorinterferentie of lichtfluctuaties.
Randdetectie : Identificeert pixelniveau intensiteitsveranderingen (randen) die contouren vormen. De Canny Edge Detector (een methode in meerdere stappen: smoothing, gradiëntberekening, non-maxima onderdrukking, hysteresis thresholding) is de gouden standaard en levert dunne, continue randen op. De Sobel-operator, die horizontale/verticale randen benadrukt, werkt voor dikke randen.
Thresholding : Converteert grijswaardenrandkaarten naar binaire (zwart/wit) beelden, waarbij de voorgrond (objectranden) als 1 en de achtergrond als 0 wordt weergegeven - vereenvoudiging van contouropvolging.
2.2 Contouropvolging
Na voorverwerking volgen algoritmen verbonden voorgrondpixels om contouren te vormen. De Freeman Chain Code wordt veel gebruikt: het representeert contouren als richtingcodes (omhoog, omlaag, links, rechts) ten opzichte van het vorige pixel, waardoor de opslag wordt verkleind en een eenvoudige vormvergelijking mogelijk is. Bibliotheken zoals OpenCV vereenvoudigen dit met functies zoals findContours(), die contourpixelcoördinaten retourneert en filtering toelaat (op oppervlakte of aspectverhouding) om ruis te verwijderen.

3. Geavanceerde technieken
Traditionele methoden werken in gecontroleerde, hoog-contrastomgevingen, maar voor realistische scenario's (onregelmatige verlichting, overlappende objecten) zijn geavanceerde aanpakken nodig:
Adaptieve drempelwaarde : Bereken lokale drempelwaarden voor elk pixel (tegenover één globale drempel), ideaal voor afbeeldingen met variabele verlichting (bijvoorbeeld industriële onderdelen onder fabrieksverlichting).
Detectie op basis van deep learning : Convolutional Neural Networks (CNN's) halen grenzen direct uit ruwe afbeeldingen, zonder handmatige voorverwerking. Modellen zoals HED (Holistically-Nested Edge Detector) en RCF (Richer Convolutional Features) combineer multi-schaal CNN-kenmerken voor hoogresolutie-kaarten van randen, uitstekend in complexe scènes (medische afbeeldingen, drukke omgevingen).
4. Belangrijkste uitdagingen
Ondanks vooruitgang blijven er praktische obstakels bestaan:
Ruis en verlichting : Fabrieksvloeren, weinig licht of buitenomgevingen veroorzaken onderbroken/valse contouren.
Overlappende/veroorloofde objecten : Opgestapelde onderdelen laten contouren samensmelten, waardoor individuele vormen moeilijk te onderscheiden zijn.
Doorzichtige/reflecterende materialen : Glas of metaal verspreidt licht, waardoor zwakke/vervormde randen ontstaan.
Real-time prestaties : Industriële taken (inspectie op de lopende band) vereisen 30+ frames per seconde (FPS). Deep learning modellen vereisen optimalisatie (kwantisering, GPU-versnelling) om aan de snelheidseisen te voldoen.
5. Toepassingen in de praktijk
Contourdetectie zorgt voor automatisering in verschillende industrieën:
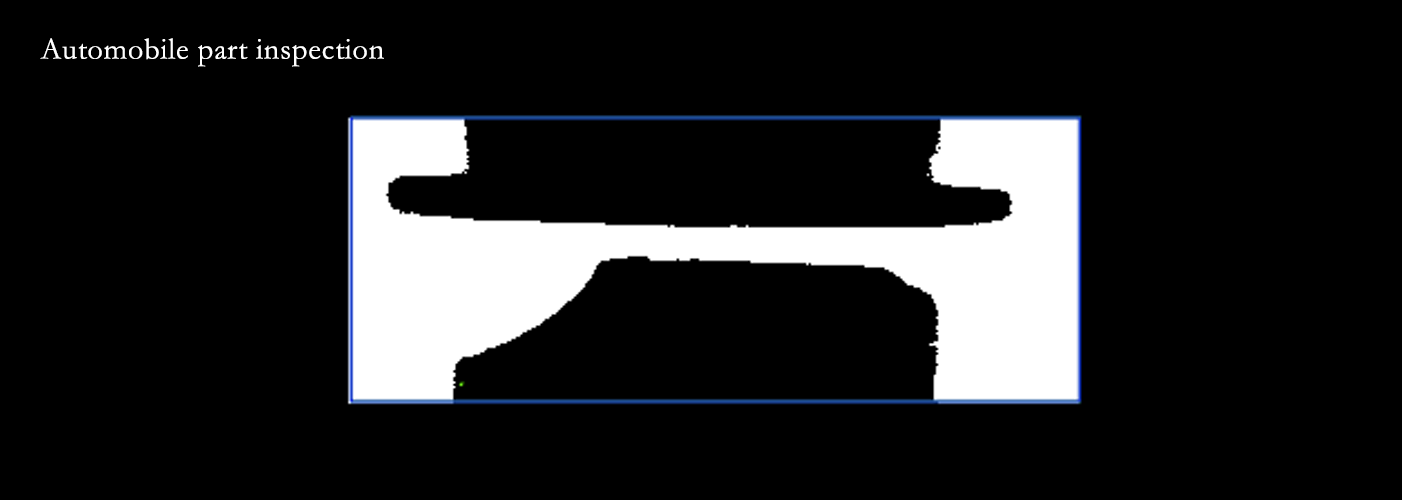
Industriële kwaliteitscontrole : Controleert op defecten (scheuren, deuken) in de productie. Bijvoorbeeld in de auto-industrie wordt gecontroleerd of motordelen (tandenwiel, pakkingen) overeenkomen met de ontwerpcontouren en worden afwijkende onderdelen afgewezen.
Robotisch pakken en plaatsen : Helpt robots bij het lokaliseren van objecten. In pakhuizen gebruiken robotarmen contouren om pakketten op transportbanden te detecteren, het middelpunt/oriëntatie te berekenen en de greep aan te passen.
Medische beeldvorming : Segmentatie van anatomische structuren (tumoren in CT-scans, celgrenzen in histologische preparaten) om de diagnose te ondersteunen. Deep learning modellen verwerken variabele biologische weefsels goed.
Landbouw : Sorteert fruit (appels, sinaasappels) op basis van grootte/rijpheid via contouranalyse en detecteert gewasziekten aan veranderingen in bladcontouren.
Verkeersbewaking : Volgt voertuigen, meet de verkeersstroom of identificeert ongevallen (via ongebruikelijke contouren of stilstaande objecten) met behulp van bewakingscamera's.
6. Toekomstige trends
Drie trends zullen de vormgevingsdetectie bepalen:
Edge AI-integratie : Lichte modellen (gequantiseerde CNN's) op edge-apparaten (industriële camera's, drones) maken realtime verwerking mogelijk zonder afhankelijkheid van de cloud - cruciaal voor autonome robots.
Multi-modale fusie : Het combineren van visuele gegevens met LiDAR/thermische beeldvorming verbetert de detectie in moeilijke omstandigheden (bijvoorbeeld thermische beeldvorming versterkt grenzen bij weinig licht; LiDAR voegt 3D-diepte toe voor overlappende objecten).
Uitlegbare AI (XAI) : XAI-technieken zullen verduidelijken hoe deep learning-modellen contouren detecteren en zo het vertrouwen opbouwen in kritieke sectoren (medische diagnostiek, lucht- en ruimtevaartinspectie).
Conclusie
Machinevisie voor vormgevingsdetectie verbindt ruwe beelddata met bruikbare inzichten en zorgt zo voor automatisering en kwaliteitscontrole. Van traditionele randdetectie naar deep learning is het geëvolueerd om complexe uitdagingen aan te pakken. Naarmate de technologie zich blijft ontwikkelen, zal het centraal blijven in slimme systemen en machines in verschillende industrieën beter en betrouwbaarder maken.





