

De toepassing van machinevisiecamera's in projecten voor het herkennen van kentekenplaten
Machine vision-camera's zijn de kern van LPR-systemen en bepalen de nauwkeurigheid door het maken van hoogwaardige afbeeldingen van kentekenplaten. Dit artikel behandelt kort de keuze van deze camera's, de coördinatie met software en praktische optimalisatie voor LPR-projecten.
1. Camera-keuze: De basis van LPR
Voor LPR specifieke machine vision-camera's zijn hoge-resolutiebeelden en sterke aanpassingsvermogen aan de omgeving vereist. Belangrijke criteria zijn resolutie (2 megapixel voor korte afstanden, 4–5 megapixel voor lange afstanden), beeldfrequentie (15–30 FPS voor lage snelheid, 30–60 FPS voor hoge snelheid) en lichtprestaties (gevoeligheid ≤ 0,01 lux, ≥ 120 dB WDR, geïntegreerde IR-verlichting).
Lenzen moeten afgestemd zijn op de opnameafstand (8–12 mm voor korte afstanden, 12–25 mm voor lange afstanden, zoomlenzen voor variabele scenario’s), met een hoek tussen camera en voertuig van ≤ 30°. Interfaces zoals Gigabit Ethernet (voor lange afstanden) en USB 3.0 (voor kleinschalige toepassingen), plus ondersteuning voor GenICam, vereenvoudigen de systeemintegratie.
2. Softwarecoördinatie: Realisatie van intelligente herkenning
Machine vision-camera's leveren beeldgegevens, en LPR-software vormt een gesloten lus via voorverwerking (optimalisatie van de beeldkwaliteit), positionering (locatiebepaling van kentekenplaten), segmentatie (scheiding van tekens), herkenning (omzetting van afbeeldingen naar tekst) en gegevensuitvoer.
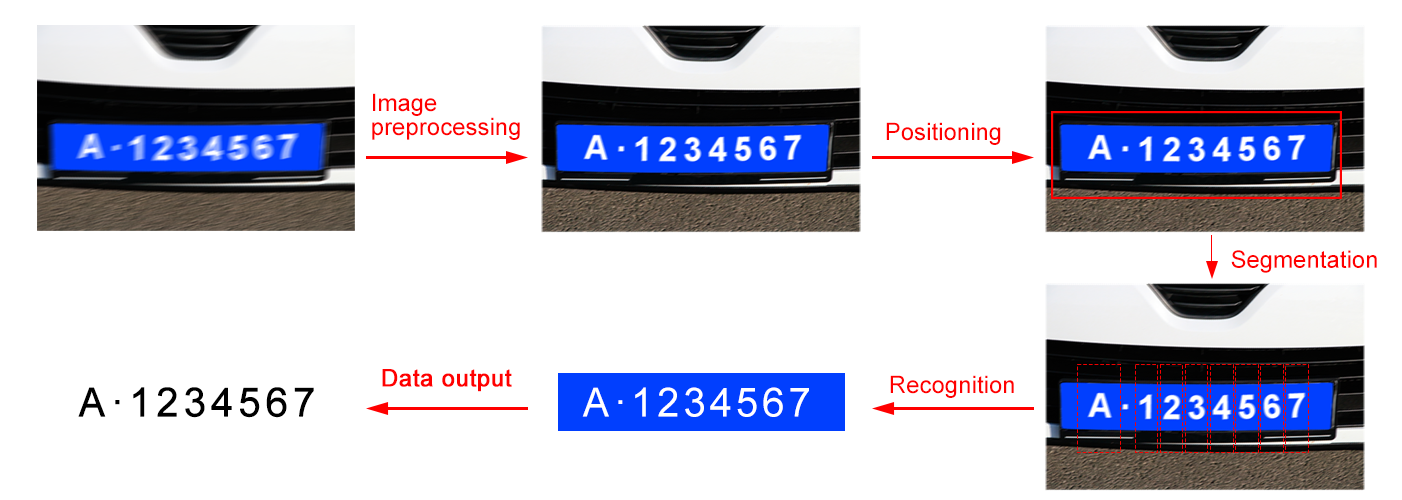
De softwareprestaties zijn nauw verbonden met de camera-kwaliteit: duidelijkere camera-afbeeldingen verminderen de moeilijkheid van de voorverwerking en verbeteren de herkenning nauwkeurigheid, terwijl een hoge camerabeeldfrequentie meervoudige framevergelijking mogelijk maakt voor stabielere resultaten, wat integratie met systemen op hoger niveau ondersteunt voor praktisch gebruik.
3. conclusie
Samenvattend zijn machine vision-camera's de sleutel tot de stabiele en efficiënte werking van LPR-projecten, waarbij de keuze (met nadruk op resolutie, beeldfrequentie, lichtprestaties, lenzen en interfaces) en de softwarecoördinatie elkaar wederzijds versterken. Wat de prijs betreft, varieert deze afhankelijk van de camera-specificaties: 2-megapixel basismodellen zijn kosteneffectief voor kleine parkeerplaatsen, terwijl 4- tot 5-megapixel high-performance-camera's met geavanceerde functies beter geschikt zijn voor scenario's met hoge eisen, zoals snelwegen, waarbij een evenwicht wordt gevonden tussen kosten en projectvereisten om optimale LPR-toepassingseffecten te bereiken.





