

Wykrywanie konturów w wizji maszynowej
W epoce Industry 4.0 i inteligentnej automatyki, wizja maszynowa stała się kluczową technologią, umożliwiając maszynom „widzenie” i interpretowanie danych wizualnych z precyzją często przewyższającą możliwości ludzkie. Wśród jej głównych funkcji, wykrywanie konturów odgrywa kluczową rolę: wyodrębnia kształty granic obiektów z obrazów cyfrowych, tworząc podstawę do zadań takich jak rozpoznawanie obiektów, pomiar wymiarów, inspekcja wad oraz manipulacja robotami.
1. Czym jest wykrywanie konturów?
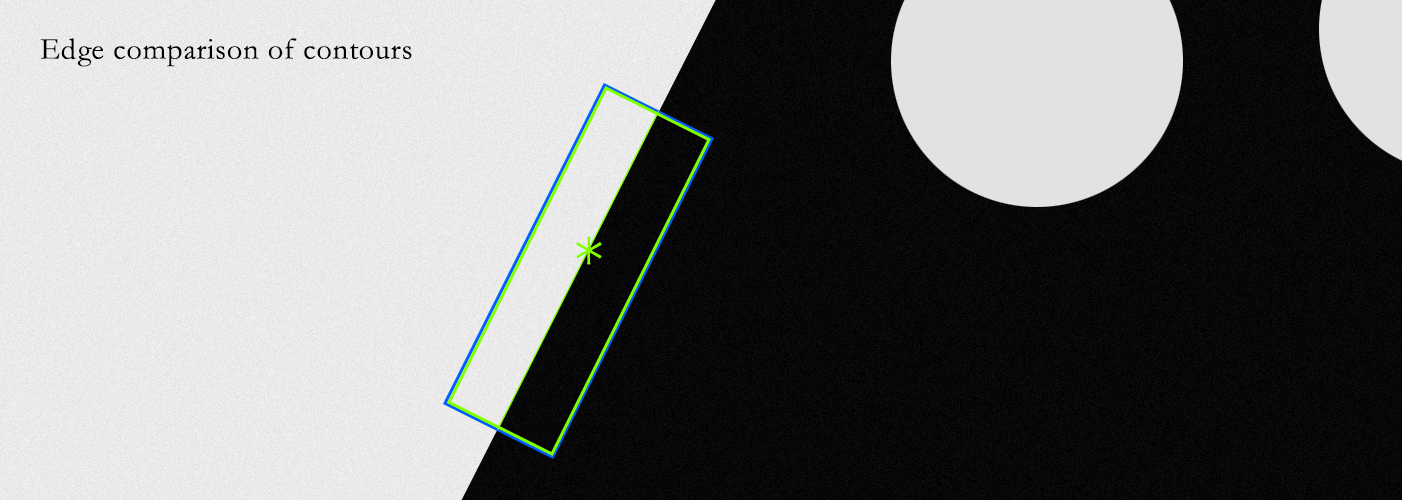
„Kontur” w przetwarzaniu obrazu to krzywa łącząca ciągłe punkty (na granicy obiektu) o tej samej intensywności lub kolorze, oddzielając obiekt od jego tła. W przeciwieństwie do dyskretnych krawędzi (przejść poziomu jasności na poziomie piksela), kontury są ciągłymi pętlami (lub krzywymi otwartymi dla częściowych obiektów), które reprezentują obiektowy kształt kształt, a nie tylko izolowane zmiany intensywności.
Głównym celem detekcji konturu jest uproszczenie danych obrazowych: zmniejszenie dwuwymiarowego obrazu do jednowymiarowych linii konturowych pozwala maszynom skutecznie analizować geometrię obiektu (wielkość, kąty, symetrię), bez konieczności przetwarzania każdego piksela – co jest istotne w aplikacjach wymagających działania w czasie rzeczywistym, gdzie jednakowo ważna jest szybkość i dokładność.
2. Podstawowe zasady
Detekcja konturu opiera się na dwóch kluczowych krokach: wstępnym przetwarzaniu (wzmacnianiu kontrastu między obiektem a tłem) i ekstrakcji konturu (identyfikacji punktów granicznych). Te kroki pozwalają zrekompensować wady surowego obrazu, takie jak szumy, nierówny rozkład oświetlenia lub niski kontrast, które utrudniają wyraźne wyznaczenie granic.
2.1 Przetwarzanie wstępne
Obrazy surowe rzadko posiadają wyraźne granice, dlatego przetwarzanie wstępne odgrywa kluczową rolę:
Konwersja na odcienie szarości : Większość algorytmów wykorzystuje jednokanałowe obrazy w odcieniach szarości (upraszczając dane z trzech kanałów RGB do jednego, ponieważ kolor często jest nieistotny).
Redukcja hałasu : Rozmycie Gaussa wyrównuje obrazy za pomocą jądra Gaussa, eliminując szumy wysokoczęstotliwościowe, przy jednoczesnym zachowaniu głównych zmian intensywności – kluczowe dla unikania fałszywych krawędzi wynikających z zakłóceń czujnika lub fluktuacji oświetlenia.
Wykrywanie krawędzi : Wykrywa zmiany intensywności pikseli na poziomie piksela (krawędzie), które tworzą kontury. Canny Edge Detector (metoda wieloetapowa: wygładzanie, obliczanie gradientu, tłumienie nie-maksymalne, progowanie histerezy) jest standardem referencyjnym, tworząc cienkie, ciągłe krawędzie. Operator Sobela, który podkreśla krawędzie poziome/pionowe, sprawdza się przy grubszych granicach.
Progowanie : Konwertuje mapy krawędzi w skali szarości na obrazy binarne (czarno-białe), z pierwszym planem (krawędziami obiektu) jako 1 i tłem jako 0, co upraszcza śledzenie konturów.
2.2 Ekstrakcja konturów
Po wstępnym przetworzeniu algorytmy śledzą połączone piksele pierwszego planu, tworząc kontury. Freeman Chain Code jest powszechnie stosowany: reprezentuje kontury jako kody kierunku (góra, dół, lewo, prawo) względem poprzedniego piksela, zmniejszając miejsce na dysku i umożliwiając łatwe porównywanie kształtów. Biblioteki takie jak OpenCV upraszczają to, oferując funkcje takie jak findContours(), która zwraca współrzędne pikseli konturowych i umożliwia filtrowanie (np. według powierzchni lub proporcji boków) w celu usunięcia zakłóceń.

3. Zaawansowane techniki
Tradycyjne metody działają w kontrolowanych, wysokokontrastowych warunkach, jednak w realnych scenariuszach (nierównomierne oświetlenie, nakładające się obiekty) potrzebne są zaawansowane podejścia:
Progowanie adaptacyjne : Oblicza progi lokalne dla każdego piksela (w przeciwieństwie do pojedynczego progu globalnego), idealne do obrazów z różnym oświetleniem (np. części przemysłowe pod światłami fabrycznymi).
Wydobywanie oparte na uczeniu głębokim : Splotowe sieci neuronowe (CNN) bezpośrednio wydobywają granice z surowych obrazów, pomijając ręczne przygotowanie danych. Modele takie jak HED (Holistycznie-Węzłowy Detektor Krawędzi) i RCF (Bogatsze Cechy Splotowe) fuzja wieloskalowych cech CNN w celu uzyskania map krawędzi o wysokiej rozdzielczości, doskonałe w złożonych scenach (obrazy medyczne, zatłoczone środowiska).
4. Kluczowe wyzwania
Mimo postępów, pozostają wyzwania wynikające z rzeczywistości:
Szumy i oświetlenie : Podłogi fabryczne, słabe oświetlenie lub środowiska zewnętrzne powodują przerwane/fałszywe kontury.
Nakładające się/zakryte obiekty : Nałożone na siebie części łączą kontury, co utrudnia odróżnienie indywidualnych kształtów.
Przezroczyste/odbijające materiały : Szkło lub metal rozprasza światło, tworząc słabe/zniekształcone krawędzie.
Wykonanie w czasie rzeczywistym : Zadania przemysłowe (inspekcja linii montażowej) wymagają 30+ klatek na sekundę (FPS). Modele uczenia głębokiego wymagają optymalizacji (kwantyzacja, akceleracja GPU), aby spełnić wymagania szybkości.
5. Zastosowania w praktyce
Wykrywanie konturów wspiera automatyzację w różnych sektorach:
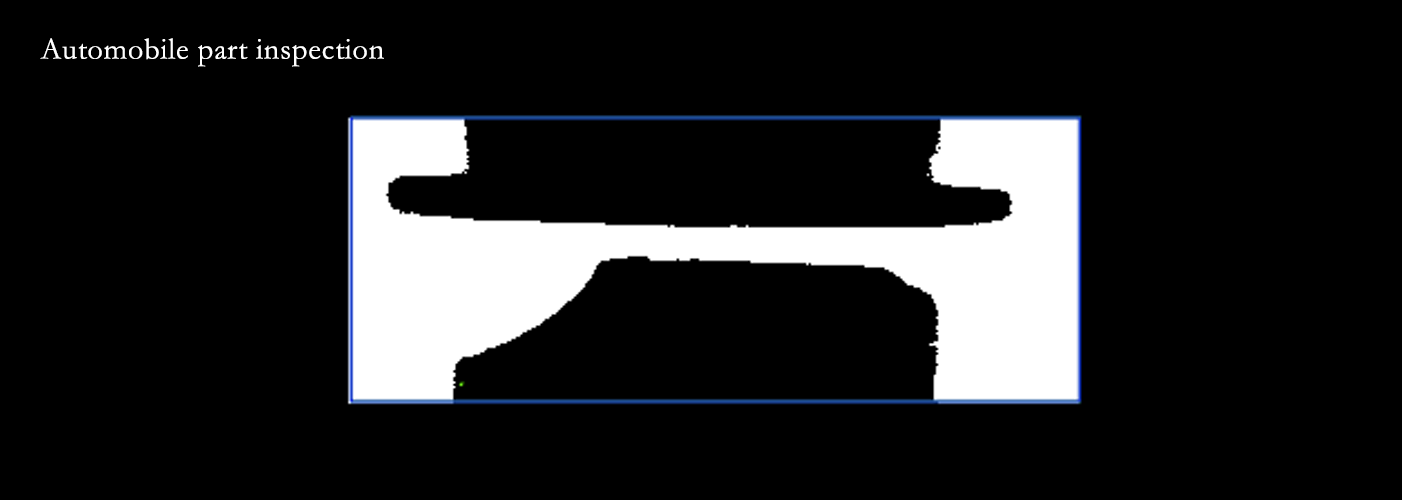
Inspekcja jakości przemysłowej : Wykrywa wady (pęknięcia, wgniecenia) w produkcji. Na przykład, w przemyśle motoryzacyjnym weryfikowane są elementy silnika (zębaki, uszczelki), by upewnić się, że ich kontury odpowiadają projektowanym, odrzucając części poza tolerancją.
Roboty do manipulacji przedmiotami : Pomaga robotom lokalizować obiekty. W magazynach ramiona robotów wykorzystują kontury do wykrywania paczek na taśmociągach, obliczania ich środka/orientacji i dostosowania uchwytu.
Obrazowaniu medycznym : Segmentuje struktury anatomiczne (guzy na tomografii, granice komórek na preparatach histologicznych), wspomagając diagnozowanie. Modele uczenia głębokiego dobrze radzą sobie z zmienną tkanką biologiczną.
Rolnictwo : Sortuje owoce (jabłka, pomarańcze) według wielkości/dojrzałości poprzez analizę konturów oraz wykrywa choroby roślin dzięki zmianom konturów liści.
Monitorowanie ruchu drogowego : Śledzi pojazdy, mierzy natężenie ruchu lub identyfikuje wypadki (poprzez nietypowe kontury lub nieruchome obiekty) z wykorzystaniem kamer monitoringu.
6. Trendy przyszłości
Trzy trendy będą kształtować detekcję konturów:
Integracja Edge AI : Lekkie modele (zakwantyzowane sieci CNN) na urządzeniach krawędziowych (kamery przemysłowe, drony) umożliwiają przetwarzanie w czasie rzeczywistym bez potrzeby korzystania z chmury – co jest kluczowe dla robotów autonomicznych.
Fuzja wielomodalna : Łączenie danych wizualnych z LiDAR/termowizją poprawia wykrywanie w trudnych warunkach (np. termowizja zwiększa widoczność konturów przy słabym oświetleniu; LiDAR dostarcza głębi przestrzennej 3D dla nakładających się obiektów).
Wyjaśnialna sztuczna inteligencja (XAI) : Techniki XAI wyjaśnią, jak modele uczenia głębokiego wykrywają kontury, zwiększając zaufanie w kluczowych dziedzinach (np. diagnostyka medyczna, inspekcja lotnicza).
Podsumowanie
Detekcja konturów w wizji maszynowej łączy surowe dane obrazowe z użytecznymi informacjami, napędzając automatyzację i kontrolę jakości. Od tradycyjnej detekcji krawędzi po uczenie głębokie, technologia ta ewoluowała, aby sprostać złożonym wyzwaniom. W miarę rozwoju technologii pozostanie ona kluczowym elementem inteligentnych systemów, czyniąc maszyny bardziej kompetentnymi i niezawodnymi w różnych sektorach.





