

Wizja maszynowa w rozpoznawaniu tablic rejestracyjnych
W erze szybkiego postępu technologicznego, wizja maszynowa stała się podstawą systemów inteligentnych, rewolucjonizując branże poprzez umożliwienie maszynom „widzenia” i interpretowania danych wizyjnych. Jednym z najbardziej praktycznych zastosowań jest rozpoznawanie tablic rejestracyjnych (LPR), które zamienia ich przechwytywanie w narzędzie optymalizujące zarządzanie ruchem drogowym, zwiększające bezpieczeństwo oraz wspierające rozwój miast inteligentnych.
1. Zasada działania wizji maszynowej w rozpoznawaniu tablic rejestracyjnych
Pobieranie obrazu
Jako podstawa LPR, pozyskiwanie obrazu wykorzystuje kamery wysokiej rozdzielczości (2–8 megapikseli) oraz specjalistyczne czujniki zainstalowane w kluczowych lokalizacjach (skrzyżowania, wejścia do parkingu). Urządzenia te są kalibrowane pod kątem czasu ekspozycji, przysłony i wartości ISO, aby uzyskać wyraźne obrazy pojazdów, zapewniając czytelność tablic rejestracyjnych dla dalszego przetwarzania.

Wstępna obróbka obrazu
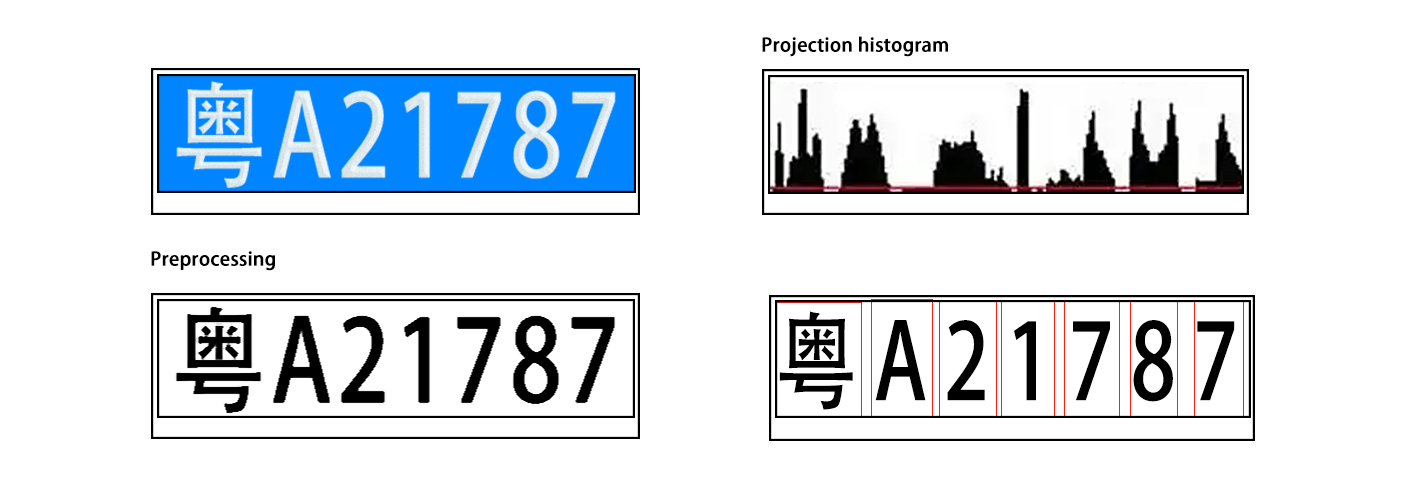
Surowe obrazy pojazdów często zawierają szumy, nierównomierne oświetlenie i niski kontrast. Wstępną obróbkę przeprowadza się poprzez konwersję na odcienie szarości (upraszczanie danych przy jednoczesnym zachowaniu struktury tablicy), redukcję szumów (filtrowanie Gaussa/medianowe) oraz wzmocnienie kontrastu (wyrównanie histogramu), co czyni szczegóły tablicy rejestracyjnej bardziej widocznymi przy lokalizacji.
Lokalizacja tablicy rejestracyjnej
W tym kroku izoluje się tablicę rejestracyjną z obrazów pojazdu, wykorzystując jej unikalne cechy: kształt (standardowy prostokąt o ustalonym współczynniku proporcji), kolor (np. niebiesko-biały dla samochodów cywilnych w Chinach) oraz teksturę. Detekcja krawędzi (Canny) i segmentacja kolorów współpracują, aby przyciąć obszar tablicy, eliminując nieistotne elementy.
Segmentacja znaków
Aby przygotować do rozpoznania, segmentacja znaków dzieli znaki na tablicy na osobne obrazy. Wykorzystuje projekcję poziomą (pionowy zakres znaku) i projekcję pionową (wykrywanie przerw między znakami). Stosuje się korekcję nachylenia dla ukośnie ustawionych tablic, zapewniając dokładne oddzielenie każdego znaku.
Rozpoznawanie znaków
Główny krok wykorzystuje rozpoznawanie znaków optycznych (OCR, porównywanie oparte na szablonach) lub uczenie głębokie (CNN, automatyczne uczenie się na podstawie zestawów danych). Każdy segmentowany znak jest przetwarzany, przekształcany na tekst i łączenie w kompletny numer rejestracyjny.
2. Zastosowania wizji maszynowej w rozpoznawaniu tablic rejestracyjnych
Zarządzanie ruchem
Systemy LPR na skrzyżowaniach i autostradach monitorują pojazdy, rozpoznają tablice i dopasowują je do danych o wykroczeniach. Rejestrują numery tablic, czas i lokalizację wykroczenia, a następnie wysyłają informacje do platform zarządzania, zmniejszając pracochłonność ręczną i poprawiając bezpieczeństwo ruchu drogowego.
Zarządzanie parkingiem
LPR automatyzuje działania związane z parkowaniem: kamery rejestrują tablice przy wejściach (rejestrując czas wejścia, otwierając bariery) oraz przy wyjściach (obliczając czas postoju, generując opłaty dla płatności bezgotówkowych). To skraca czasy oczekiwania i eliminuje problemy związane z biletami.
Płatność mytnych
Na autostradach i w tunelach system rozpoznawania tablic rejestracyjnych umożliwia bezprzystankowy pobór opłat. Rozpoznaje tablice, sprawdza rejestrację, automatycznie obniża opłaty dla zarejestrowanych pojazdów (skracając czas transakcji do poniżej 1 sekundy) oraz generuje rachunki dla niezarejestrowanych, zmniejszając tym samym korki.

Bezpieczeństwo i nadzór
Zintegrowany z kamerami w przestrzeni publicznej, system rozpoznawania tablic rejestracyjnych skanuje numery i porównuje je z listami obserwowanych (skradzione samochody, podejrzane pojazdy). Powiadamia personel ochrony o dopasowaniach, umożliwiając szybką reakcję i zwiększając bezpieczeństwo publiczne.
3. Zalety wizji maszynowej w rozpoznawaniu tablic rejestracyjnych
Wysoka wydajność
Wizja maszynowa przetwarza setki obrazów na minutę, z czasem rozpoznania od 0,1 do 0,5 sekundy na pojazd. W przeciwieństwie do operatorów ręcznych, zapewnia stałą wydajność, obniżając koszty i poprawiając jakość obsługi.
Wysoka dokładność
Zaawansowane algorytmy i sztuczna inteligencja zapewniają dokładność powyżej 99% w warunkach idealnych oraz powyżej 95% w trudnych warunkach środowiskowych — znacznie wyższą niż przy ręcznym rozpoznawaniu (powyżej 5% błędów). Gwarantuje to niezawodność w poborze opłat i zabezpieczeniach.
24/7 operation
Wyposażony w czujniki o niskim świetle i kamery odporne na warunki pogodowe, LPR działa bez przerwy. Oświetlenie podczerwone/LED pomaga w nagrywaniu w nocy, a algorytmy wzmacniania zmniejszają wpływ pogody, zapewniając nieprzerwaną pracę.
Zarządzanie danymi i analiza
Wyniki rozpoznawania (numer tablicy, czas, lokalizacja, obrazy) są przechowywane w scentralizowanej bazie danych w celu szybkiego wyszukiwania. Dane są analizowane w celu identyfikacji trendów optymalizacji sygnałów drogowych, dostosowania cen parkingowych lub śledzenia podejrzanych pojazdów.
4. Wyzwania i rozwiązania w rozpoznawaniu tablic rejestracyjnych w oparciu o wizję maszynową
Warunkach
Ekstremalne warunki pogodowe (deszcz, mgła, blask), zmiany oświetlenia i zużyte płyty zmniejszają dokładność do <80% w ciężkich przypadkach, wpływając na niezawodność.

Złożone sceny pojazdów
Okluzja (zablokowane płyty), nachylenie/zakłócenie i scenariusze wielopłatowe zakłócają rozpoznawanie, ponieważ tradycyjne algorytmy zmagają się z niestandardowymi wejściami.
Rozwiązania i ulepszenia
Optymalizacja sprzętu (kamery HDR, oświetlenie podczerwone) i ulepszenia algorytmu (adaptywne redukcja hałasu, usuwanie mgły) rozwiązują problemy środowiskowe. Korekta skrzywienia, obsługa okluzji i głębokie uczenie się (CNN oparte na regionie) rozwiązują złożone sceny. Regularna konserwacja i aktualizacje utrzymują systemy w stanie dokładnym.
5. Przyszłe trendy w zakresie wizji maszynowej w rozpoznawaniu tablic rejestracyjnych
Głębokie uczenie się i integracja sztucznej inteligencji
Zaawansowane modele (transformatory, uczenie się w krótkim czasie) obsługują trudne przypadki (znużone płyty). Systemy LPR od końca do końca (jedyna sieć neuronowa dla wszystkich kroków) upraszczają projektowanie, a sztuczna inteligencja przewiduje zachowanie pojazdu w celu proaktywnego zarządzania.
Fuzja wieloczująca
LPR będzie zintegrować LiDAR (3D dane pojazdów), radar (prędkość/odległość) i kamery termiczne (warunki ciemności/dymu). Fuzja danych zmniejsza liczbę błędów, dzięki czemu systemy są bardziej wytrzymałe do użytku w terenie terenowym i w sytuacjach awaryjnych.
Usługi oparte na chmurze
LPR oparte na chmurze oferuje skalowalność (dodaj kamery bez aktualizacji sprzętu), zdalne zarządzanie i integrację międzysystemową (dzielenie się danymi z platformami inteligentnych miast). Przechowywanie w chmurze umożliwia długoterminową analizę zastosowań na dużą skalę.
6. Podsumowanie
Wizualność maszynowa jest podstawą nowoczesnej LPR, rozwiązując problemy z ręcznym systemem z szybkością, dokładnością i 24 godziny na dobę. Postęp w nauce głębokiej, syntezie wieloczujników i technologii chmurowej pokonuje wyzwania. W miarę rozwoju inteligentnych miast LPR odegra kluczową rolę w łączeniu pojazdów, infrastruktury i użytkowników, kształtując inteligentny transport.





