

Detecção de Contorno por Visão Computacional
Na era da Indústria 4.0 e automação inteligente, a visão computacional tornou-se uma tecnologia fundamental, permitindo que máquinas "vejam" e interpretem dados visuais com precisão frequentemente superior às capacidades humanas. Entre suas funções principais, detecção de contorno é fundamental: ela extrai as formas dos limites dos objetos a partir de imagens digitais, constituindo a base para tarefas como reconhecimento de objetos, medição de dimensões, inspeção de defeitos e manipulação robótica.
1. O que é Detecção de Contornos?
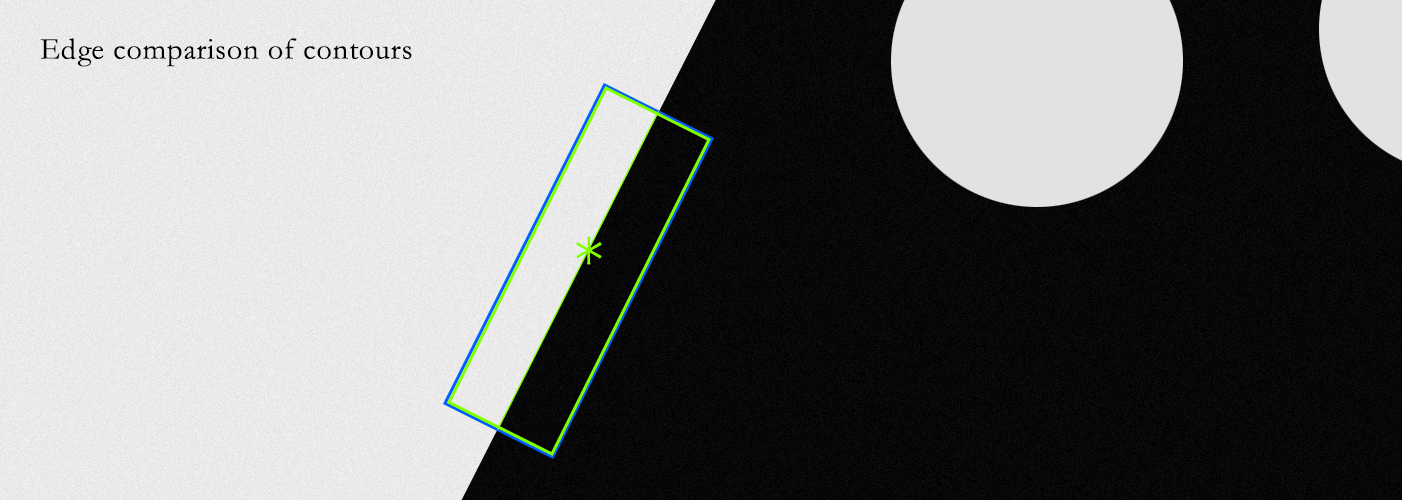
Um "contorno" no processamento de imagens é uma curva que conecta pontos contínuos (ao longo do limite de um objeto) com a mesma intensidade ou cor, separando o objeto de seu fundo. Ao contrário das bordas discretas (transições de claro-escuro ao nível dos pixels), os contornos são laços contínuos (ou curvas abertas para objetos parciais) que representam a formato forma de um objeto
Não apenas mudanças isoladas de intensidade. O principal objetivo da detecção de contornos é simplificar os dados da imagem: reduzir uma imagem 2D a linhas de contorno 1D permite que as máquinas analisem a geometria de um objeto (tamanho, ângulos, simetria) de forma eficiente, sem processar cada pixel – essencial para aplicações em tempo real onde velocidade e precisão são igualmente importantes.
2. Princípios Básicos
A detecção de contornos baseia-se em duas etapas principais: pré-processamento (melhoria do contraste entre objeto e fundo) e extração de contornos (identificação dos pontos do limite). Estas etapas tratam defeitos da imagem original, como ruído, iluminação irregular ou baixo contraste, que dificultam a identificação dos limites.
2.1 Pré-processamento
Imagens brutas raramente possuem limites claros, então o pré-processamento é vital:
Conversão para Escala de Cinza : A maioria dos algoritmos utiliza imagens em escala de cinza de um único canal (simplificando os dados de três canais RGB para um, já que a cor geralmente é irrelevante).
Redução do ruído : O desfoque gaussiano suaviza as imagens com um kernel gaussiano, reduzindo o ruído de alta frequência enquanto preserva as mudanças significativas de intensidade — essencial para evitar bordas falsas causadas por interferências do sensor ou flutuações na iluminação.
Detecção de bordas : Identifica mudanças na intensidade dos pixels (bordas) que formam os contornos. O Detector de Bordas Canny (um método de múltiplas etapas: suavização, cálculo do gradiente, supressão não máxima, limiarização por histerese) é o padrão ouro, produzindo bordas finas e contínuas. O Operador Sobel, que destaca bordas horizontais/verticais, é eficaz para contornos grossos.
Limiarização (Thresholding) : Converte mapas de bordas em escala de cinza para imagens binárias (preto/branco), com o primeiro plano (bordas dos objetos) como 1 e o fundo como 0 — simplificando o rastreamento de contornos.
2.2 Extração de Contornos
Após o pré-processamento, algoritmos rastreiam pixels de primeiro plano conectados para formar contornos. O Código de Cadeia de Freeman é amplamente utilizado: ele representa contornos como códigos de direção (para cima, para baixo, para a esquerda, para a direita) em relação ao pixel anterior, reduzindo o armazenamento e permitindo uma comparação fácil de formas. Bibliotecas como o OpenCV simplificam isso com funções como findContours(), que retorna as coordenadas dos pixels do contorno e permite filtragem (por área ou proporção de aspecto) para remover ruídos.

3. Técnicas Avançadas
Métodos tradicionais funcionam bem em ambientes controlados e de alto contraste, mas cenários do mundo real (iluminação irregular, objetos sobrepostos) exigem abordagens avançadas:
Limiarização Adaptativa : Calcula limiares locais para cada pixel (em vez de um único limiar global), ideal para imagens com iluminação variável (por exemplo, peças industriais sob luzes de fábrica).
Detecção Baseada em Aprendizado Profundo : Redes Neurais Convolucionais (CNNs) extraem diretamente os limites a partir de imagens brutas, pulando o pré-processamento manual. Modelos como HED (Holistically-Nested Edge Detector) e RCF (Recursos Convolucionais Enriquecidos) fundir recursos CNN em múltiplas escalas para mapas de bordas de alta resolução, destacando-se em cenas complexas (imagens médicas, ambientes desordenados).
4. Principais Desafios
Apesar dos avanços, persistem obstáculos no mundo real:
Ruído e Iluminação : Chãos de fábrica, baixa iluminação ou ambientes externos causam contornos quebrados/falsos.
Objetos Sobrepostos/Ocultos : Peças empilhadas fundem contornos, dificultando a distinção das formas individuais.
Materiais Transparentes/Refletivos : Vidro ou metal dispersa a luz, criando bordas fracas/distorcidas.
Desempenho em tempo real : Tarefas industriais (inspeção de linha de montagem) necessitam de 30+ quadros por segundo (FPS). Modelos de aprendizado profundo requerem otimização (quantização, aceleração GPU) para atender às demandas de velocidade.
5. Aplicações no Mundo Real
A detecção de contornos impulsiona a automação em diversos setores:
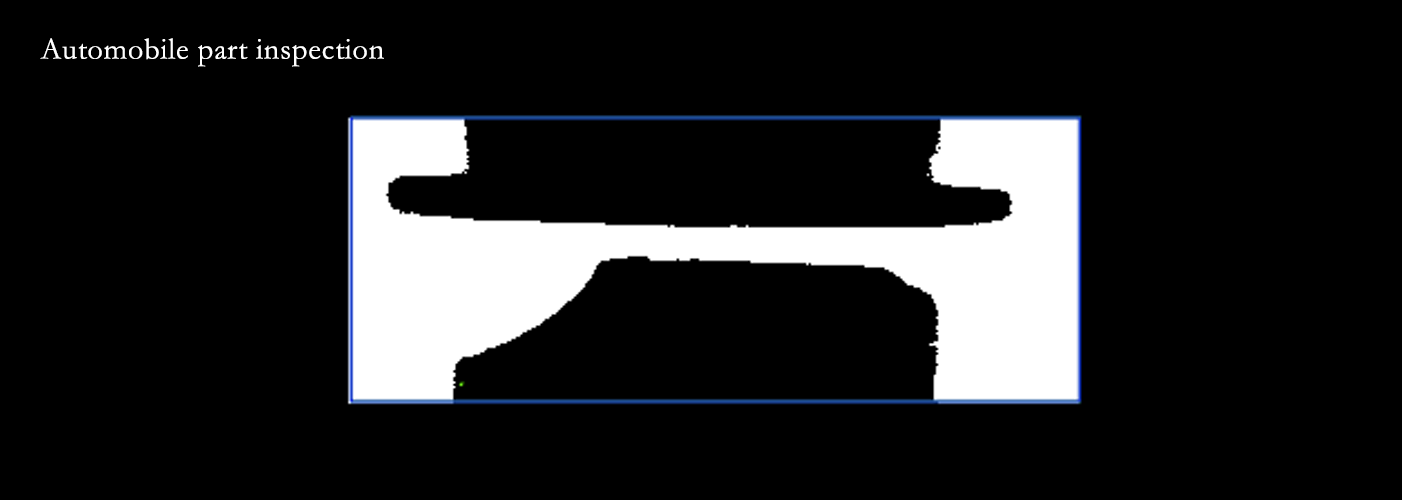
Inspecção da qualidade industrial : Verifica defeitos (rachaduras, amassados) na manufatura. Por exemplo, na produção automotiva, verifica se componentes do motor (engrenagens, juntas) correspondem aos contornos projetados, rejeitando peças fora da tolerância.
Robótica de Pegar e Colocar : Ajuda os robôs a localizar objetos. Em armazéns, braços robóticos utilizam contornos para encontrar pacotes em esteiras transportadoras, calcular centro/orientação e ajustar os movimentos de agarre.
Mercado de imagem médica : Segmenta estruturas anatômicas (tumores em exames de tomografia computadorizada, limites celulares em lâminas de histologia) para auxiliar no diagnóstico. Modelos de aprendizado profundo lidam bem com tecidos biológicos variáveis.
Agricultura : Classifica frutas (maçãs, laranjas) por tamanho/maturação por meio de análise de contornos e detecta doenças nas plantações a partir de alterações nos contornos das folhas.
Monitoramento de Tráfego : Rastreia veículos, mede fluxo ou identifica acidentes (por meio de contornos incomuns ou objetos estacionários) utilizando câmeras de vigilância.
6. Tendências Futuras
Três tendências moldarão a detecção de contornos:
Integração de Edge AI : Modelos leves (CNNs quantizados) em dispositivos de borda (câmeras industriais, drones) permitem processamento em tempo real sem dependência de nuvem — essencial para robôs autônomos.
Fusão Multi-Modal : A combinação de dados visuais com LiDAR/imagens térmicas melhora a detecção em condições adversas (por exemplo, imagens térmicas aprimoram contornos em baixa luminosidade; LiDAR adiciona profundidade 3D para objetos sobrepostos).
Inteligência Artificial Explicável (XAI) : Técnicas de XAI esclarecerão como modelos de deep learning detectam contornos, gerando confiança em áreas críticas (diagnóstico médico, inspeção aeroespacial).
Conclusão
A detecção de contornos por visão computacional conecta dados brutos de imagens a insights acionáveis, impulsionando automação e controle de qualidade. Da detecção tradicional de bordas até o aprendizado profundo, evoluiu para enfrentar desafios complexos. À medida que a tecnologia avança, permanecerá central nos sistemas inteligentes, tornando as máquinas mais capazes e confiáveis em diversos setores.





