

Princípio de Funcionamento de uma Câmera de Varredura Linear
O princípio fundamental de funcionamento de uma câmera de varredura linear é: utilizar um ou múltiplos sensores de imagem lineares, combinados com o movimento uniforme do objeto fotografado (ou da própria câmera), para coletar dados de imagem linha por linha e, finalmente, unir as informações em uma imagem 2D completa.
Seus principais passos de funcionamento são os seguintes:
Detecção Linear de Luz: O componente principal é um sensor de imagem linear (como CCD ou CMOS), que consegue capturar apenas informações de pixels unidimensionais ao longo da direção da "linha" (horizontal), diferentemente das informações bidimensionais de uma câmera de varredura de área.
Coordenação de Movimento Uniforme: Deve-se garantir um movimento relativo uniforme e estável entre a câmera e o objeto fotografado (por exemplo, o objeto move-se em uma esteira transportadora, a câmera escaneia ao longo de um trilho guia). Esta direção do movimento é a direção "linha" (vertical) da imagem.
Aquisição e Costura Linha por Linha: O sensor captura dados de pixels unidimensionais linha por linha em uma frequência fixa (frequência de linha), e cada linha de dados corresponde a uma nova posição do objeto após o movimento; a câmera interna ou o sistema de backend costura sequencialmente essas "imagens de linha" contínuas, formando, por fim, uma imagem 2D completa.
Este princípio determina que as câmeras de varredura por linha sejam mais adequadas para a inspeção de objetos de alta velocidade, comprimento longo ou grande área (como impressos, chapas metálicas, tecidos, etc.) e dependem de mecanismos de movimento externos para garantir a qualidade da imagem.
A cenários de aplicação de câmeras de varredura por linha
Os cenários principais de aplicação das câmaras de varredura linear concentram-se na aquisição de imagens e inspeção com alta precisão de objetos de alta velocidade, grande área e comprimento prolongado, sendo especialmente adequadas para cenários que exigem aquisição dinâmica contínua. Os campos típicos são os seguintes:
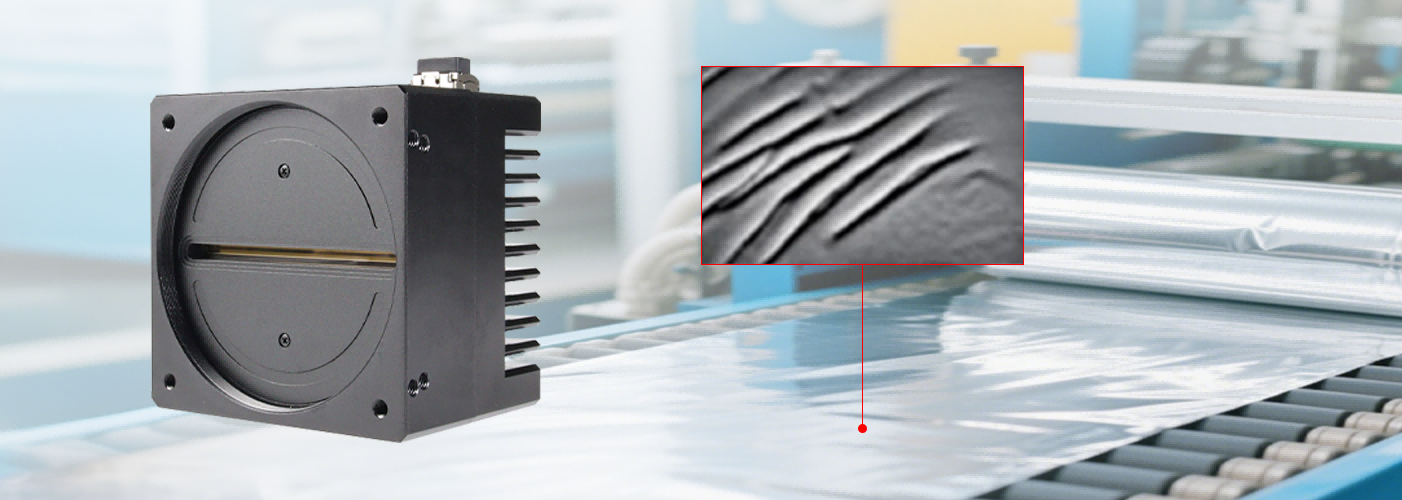
Campo de Inspeção Industrial: Este é o cenário principal de aplicação das câmaras de varredura linear. São utilizadas para inspecionar materiais em movimento contínuo nas linhas de produção, como chapas/bobinas metálicas (inspeção de defeitos superficiais), vidro/películas (inspeção de planicidade e impurezas), produtos impressos (inspeção da precisão do registro de cores e de textos) e eletrodos de baterias de íon-lítio (inspeção da uniformidade do revestimento).

Campo de Logística e Embalagem: São utilizadas para medição de volume de embalagens e identificação de códigos de barras/códigos QR em linhas de separação de alta velocidade, ou para inspeção da integridade visual de produtos continuamente embalados (como alimentos em sacos e caixas).
Campo de Impressão e Têxtil: Em máquinas de impressão web e linhas de produção de tingimento/impressão de tecidos, realizam inspeção em tempo real de diferenças de cor nos padrões impressos e defeitos na textura do tecido (como fios quebrados e furos) para garantir a qualidade da produção.
Área de Tráfego e Segurança: São utilizados na varredura do contorno de veículos em pedágios rodoviários (para obter dados sobre modelo e dimensões do veículo) ou na inspeção de trilhos ferroviários (para detectar riscos ocultos, como rachaduras e desgaste na superfície dos trilhos).
Área de Pesquisa Médica e Científica: São parcialmente aplicados em imagens médicas (como escaneamento de alta resolução de seções patológicas), observação de amostras biológicas ou em imagens de varredura linear de TC industrial—cenários que exigem alta precisão e alta resolução.





