

Советы по интеграции платы-уровневых камер для инженеров
Выбор подходящего интерфейса для интеграции камер на уровне платы
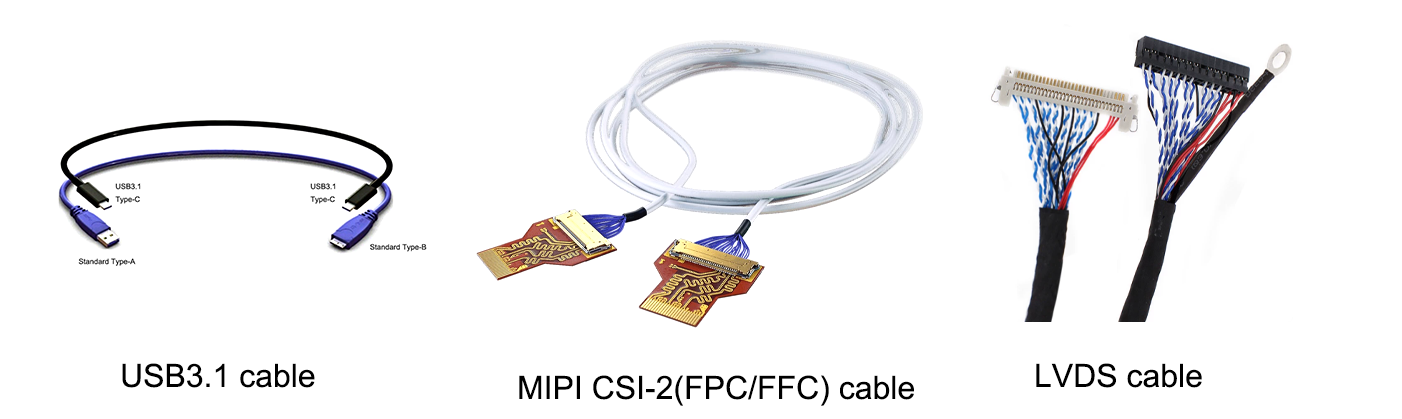
USB 3.1, MIPI CSI-2 и LVDS: компромиссы между пропускной способностью, задержкой и синхронизацией в реальном времени
Инженеры-разработчики встраиваемых систем сталкиваются с критически важными компромиссами при выборе интерфейсов для интеграции камер на уровне печатной платы. USB 3.1 обеспечивает высокую пропускную способность (5 Гбит/с), что делает его подходящим для потоковой передачи HD-видео, однако накладные расходы протокола вызывают задержку в 5–10 мс, ограничивая его применимость в контуре управления в реальном времени. MIPI CSI-2 предлагает масштабируемую пропускную способность (до 6 Гбит/с на линию) и аппаратную синхронизацию по триггеру, обеспечивая задержку менее одной миллисекунды и точную временную синхронизацию нескольких датчиков — что идеально подходит для промышленной автоматизации и робототехники. LVDS обеспечивает детерминированную передачу с чрезвычайно низкой задержкой (<1 мс) посредством простых последовательных протоколов, хотя пропускная способность на канал ограничена примерно 655 Мбит/с, что ограничивает его применение в задачах с низким разрешением или при использовании сжатых видеопотоков. В системах машинного зрения, требующих строгой синхронизации между камерами, следует отдавать предпочтение MIPI CSI-2; в задачах, критичных с точки зрения безопасности, например, в системах восприятия автономных транспортных средств, преимущество получает LVDS благодаря предсказуемости временных характеристик. USB 3.1 остаётся жизнеспособным решением для недорогих систем HD-мониторинга, не требующих работы в реальном времени, где незначительная задержка допустима — при условии, что термические и вычислительные ограничения были проверены и подтверждены.
Соблюдение целостности сигнала и передовые методы разработки печатных плат по интерфейсу
Целостность сигнала зависит от конкретного интерфейса и является основополагающим фактором надёжной работы камеры на уровне печатной платы. Для USB 3.1 необходимо поддерживать дифференциальное волновое сопротивление 90 Ом, использовать пары проводников одинаковой длины (с допуском ±5 мил), трассировку с экранированием землёй и строгое разделение от шумных цифровых цепей для подавления электромагнитных помех (ЭМП). Для MIPI CSI-2 требуется волновое сопротивление 100 Ом на каждую дифференциальную линию, согласование длин трасс в пределах ±10 мил и избегание переходных отверстий (via) вблизи приёмников — особенно критично для высокоскоростных линий, работающих на частоте выше 1,5 Гбит/с. При проектировании LVDS-интерфейсов необходимо минимизировать длину проводников (<10 дюймов), обеспечить стабильное волновое сопротивление 100 Ом и применять защитные (guard) проводники для подавления перекрёстных наводок. Во всех интерфейсах следует разделять плоскости земли, чтобы изолировать аналоговую схему датчика от цифровых доменов обработчика изображений (ISP) и процессора; размещать декорирующие конденсаторы не далее чем в 2 мм от выводов питания; а также использовать многослойные конструкции печатных плат с четырьмя и более слоями и непрерывными опорными плоскостями. Неправильная трассировка ответственна за 32 % артефактов изображения в прототипных системах машинного зрения — поэтому пост-трассировочное моделирование и верификация волнового сопротивления являются обязательными требованиями для проектов, критичных к надёжности.
Механическая интеграция: крепление объектива и оптическая гибкость
Точная установка объектива имеет решающее значение: несоосности в микронном диапазоне вызывают смещение фокуса, искажения или потерю разрешения. Инженерам необходимо обеспечить баланс между механической жёсткостью — критически важной для устойчивости к ударам и вибрациям — и возможностью регулировки на месте, что обычно достигается за счёт резьбовых оправ или опорных прокладок. Оптическая гибкость требует совместимости с различными типами объективов (с фиксированным фокусным расстоянием, вариофокальными, жидкостными) и поддержки настройки фокусного расстояния посредством спиральных механизмов или моторизованных контроллеров. Необходимо компенсировать несоответствие коэффициентов теплового расширения между объективами и датчиками — например, за счёт применения материалов с низким коэффициентом термического расширения (КТР) (например, инвара, керамических композитов) или кинематических креплений, особенно в промышленных условиях (от −40 °C до +85 °C). Для инфракрасной или мультиспектральной съёмки прозрачность материала подложки в целевой спектральной области (например, германия в дальнем ИК-диапазоне, кварцевого стекла в УФ-диапазоне) становится первоочередным ограничением при проектировании. Модульные интерфейсы объективов позволяют быстро заменять их без полной повторной калибровки, однако допуски на расстояние от фланца должны оставаться менее 10 мкм, чтобы избежать виньетирования или ухудшения функции передачи модуляции (MTF).

Обеспечение надежного совместного функционирования на уровне системы в конструкциях камер на печатной плате
Снижение ЭМП и разделение плоскости заземления для совместного функционирования датчика и ISP
Конструкции камер на уровне печатной платы без корпуса не имеют экранирования от электромагнитных помех (ЭМП), присущего герметичным модулям, что повышает требования к изоляции на уровне печатной платы между матрицами и процессорами обработки изображений (ISP). Разделённые плоскости земли — с выделением отдельных аналоговых областей для датчиков и цифровых подсистем ISP — необходимы для минимизации передачи помех по проводам, поскольку взаимодействие аналоговых и цифровых сигналов может вызывать гармоники тактовых частот, превышающие 50 дБ·мкВ/м (стандарт IEC 61000-4-3). Эффективные меры включают организацию «звёздообразного» заземления в точке ввода питания, защитные трассы с соединительными переходными отверстиями вокруг высокоскоростных цифровых цепей, отказ от термических разгрузок в земляных полигонах вблизи датчиков, а также установку ферритовых бусин на линии тактового сигнала интерфейса I²C. Целостность сигнала резко ухудшается при расстоянии между датчиком и ISP менее чем 3λ от максимальной рабочей частоты — что требует трассировки с контролируемым волновым сопротивлением и использования дифференциальных пар одинаковой длины. На этапе раннего прототипирования использование ближнепольных ЭМП-зондов (с шагом 5 мм) позволяет выявить «горячие точки»; локальное экранирование датчиков материалом на основе мю-металла снижает уровень излучаемых помех на 12–18 дБ (FCC OET-65). Поддержание минимального зазора ≥40 мил между аналоговыми и цифровыми областями последовательно повышает отношение сигнал/шум (SNR) на 20 % в модулях высокого разрешения.
Интеграция программного обеспечения и переносимость SDK для камер на уровне платы
Поддержка драйверов для кроссплатформенных систем: Linux RT, QNX и «голые» RTOS с поддержкой Spinnaker
Портативность программного обеспечения между различными платформами является обязательным требованием для развертывания встраиваемых систем машинного зрения в средах Linux в реальном времени (RT), QNX и ресурсоёмких «голых» RTOS. Каждая операционная система предъявляет свои особые требования к временным характеристикам, управлению памятью и моделям драйверов — однако при этом необходимо сохранять неизменной точную (пиксель-в-пиксель) захватываемую картинку и аппаратно-синхронизированное управление. Единый абстрактный уровень SDK устраняет этот разрыв: например, SDK Spinnaker предоставляет стандартизированные API для платформ x86, ARM и RISC-V, а также нативно поддерживает захват кадров в реальном времени, аппаратную синхронизацию и прямой доступ к регистрам ISP. Это исключает необходимость повторной разработки драйверов при переносе решений с промышленных ПК на базе Linux RT на целевые микроконтроллерные платформы с RTOS. Команды, использующие такие фреймворки, сокращают время интеграции до 40 %, сохраняя детерминированное поведение даже при тепловом снижении производительности или масштабировании напряжения.
Готовы оптимизировать интеграцию камер уровня печатной платы для серийного производства OEM?
Бесшовная интеграция камер уровня печатной платы является краеугольным камнем надежных встраиваемых систем машинного зрения высокой производительности: ни один передовой алгоритм или аппаратура обработки не способны компенсировать ошибочный выбор интерфейса, нарушения целостности сигнала или неоптимальное механическое проектирование. Следуя проверенным на практике рекомендациям по интеграции и сотрудничая с поставщиком камер, предлагающим предварительно протестированное оборудование, поддержку эталонных конструкций и программные инструменты, совместимые с различными платформами, вы сможете сократить количество итераций проектирования, ускорить вывод продукции на рынок и обеспечить стабильную, экономически эффективную производительность при серийном OEM-производстве.
Для промышленных решений на уровне платы с использованием камер, адаптированных под ваше приложение машинного зрения встраиваемых систем, или для получения полных пакетов эталонных проектов, внутренней инженерной поддержки и услуг по изготовлению продукции под собственной торговой маркой (OEM) по индивидуальному заказу (как это предлагает компания HIFLY), сотрудничайте с поставщиком, обладающим глубокими знаниями и многолетним опытом в области промышленного машинного зрения. За 15 лет работы компания HIFLY накопила обширный опыт в проектировании камер на уровне печатных плат, полной кастомизации решений OEM/ODM и комплексной интеграции встраиваемых систем машинного зрения «под ключ» — при этом деятельность компании сертифицирована по стандарту ISO 9001:2015, обеспечивается поддержка соответствия глобальным нормативным требованиям, а также предоставляются специализированные инженерные услуги по сопровождению проектирования (design-in). Свяжитесь с нами уже сегодня для бесплатной консультации без каких-либо обязательств, разработки индивидуальных прототипов или оптимизации вашего рабочего процесса интеграции камер на уровне печатных плат.





