

Четыре распространенных типа 3D-видения
По мере развития технологии 3D-визуализации появилось множество решений для удовлетворения различных промышленных и коммерческих потребностей. В данной статье HIFLY рассматриваются четыре распространенные технологии 3D-изображения, анализируя их принципы работы, преимущества, ограничения и типичные сценарии применения.
1. Стереокамера
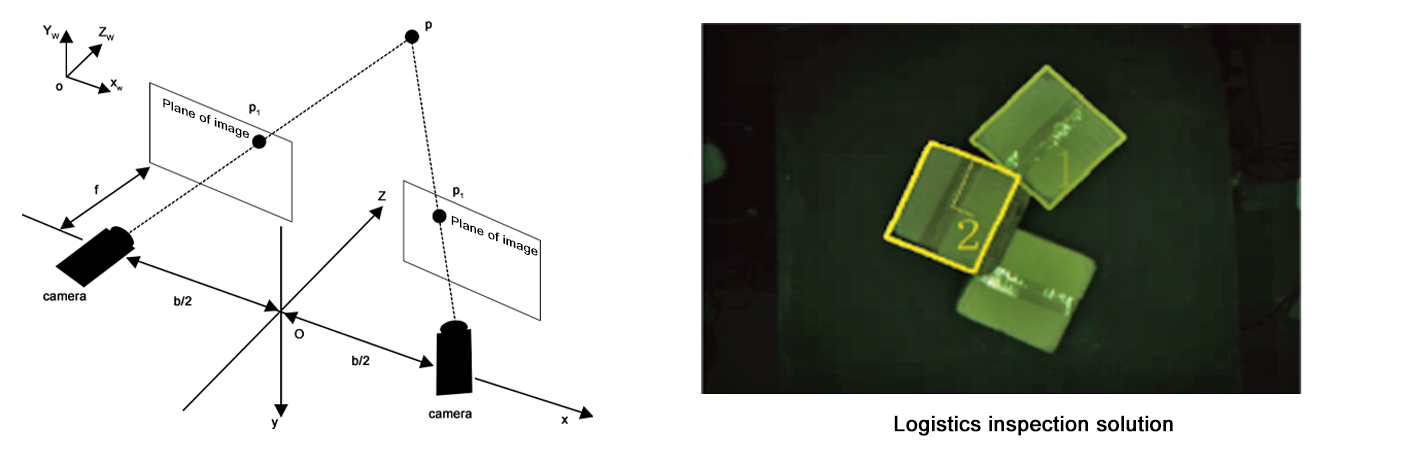
Функционируя аналогично человеческому бинокулярному зрению, стереоскопические системы используют две камеры под углом для захвата изображений с немного разных точек зрения. Система может оценивать информацию о глубине и восстанавливать 3D-модели, вычисляя пиксельное смещение (диспаритет) между двумя изображениями.
Преимущества:
Недорогая аппаратная конфигурация
Простая архитектура системы
Простая реализация и эксплуатация
Ограничения:
Ограниченная точность (обычно на уровне миллиметров)
Недостаточно для высокоточных промышленных приложений
Области применения: Базовое распознавание объектов, навигация автономных транспортных средств и потребительское определение глубины.
2. Лазерный линейный профилеграф
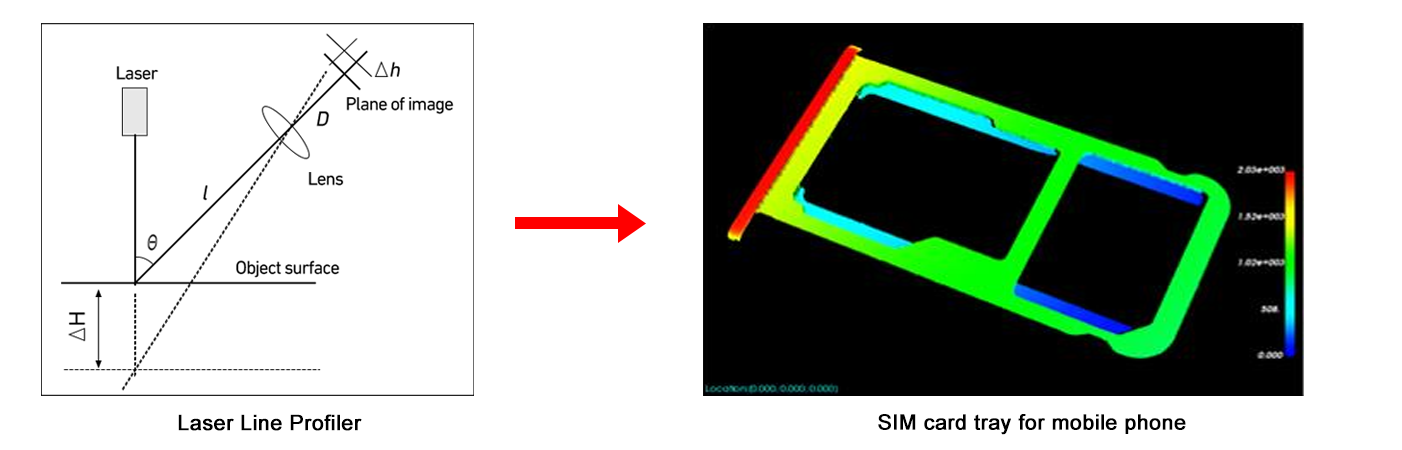
Эта система объединяет проектор лазерной линии с камерой, установленной под фиксированным углом. По мере того как лазерная полоса сканирует движущийся объект, камера захватывает искажения в проецируемой линии для создания облаков точек 3D.
Преимущества:
Исключительная точность по оси Z (уровень субмикронов)
Точность по осям XY в пределах десятков микронов
Идеально подходит для измерения плоскости/высоты высокой точности
Ограничения:
Требует координированного механического движения
Производительность снижается при отражающих поверхностях
Промышленное Преимущество: На данный момент это наиболее широко распространённое решение 3D-визуализации в производстве для контроля качества и измерения размеров.
3. Структурная Световая Камера 3D
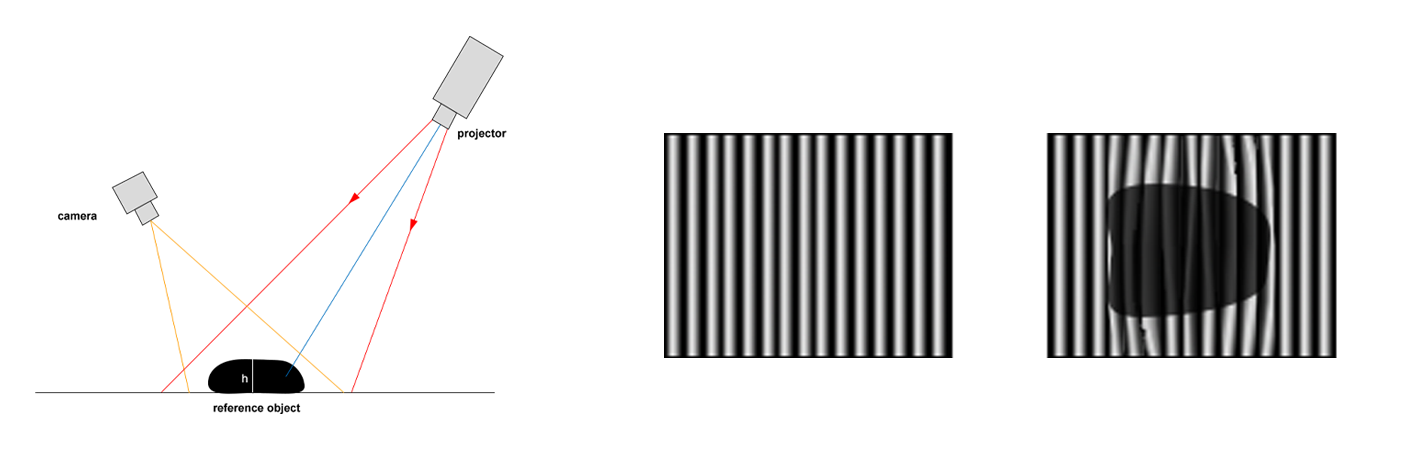
Эта технология проецирует закодированные световые паттерны (сетки или шумы) на объекты. Одна или несколько камер затем анализируют искажённые паттерны, вызванные поверхностями объектов, чтобы вычислить 3D-координаты.
Преимущества:
Измерение без контакта
Возможность сканирования без движения
Точность на уровне микрона в малых полях зрения
Эффективен в крупномасштабных приложениях
Ограничения:
Более высокая стоимость оборудования
Чувствителен к интерференции окружающего света
Основное применение: случайное трёхмерное захватывание
4. Сканер лазерный на основе временной модуляции (ToF)
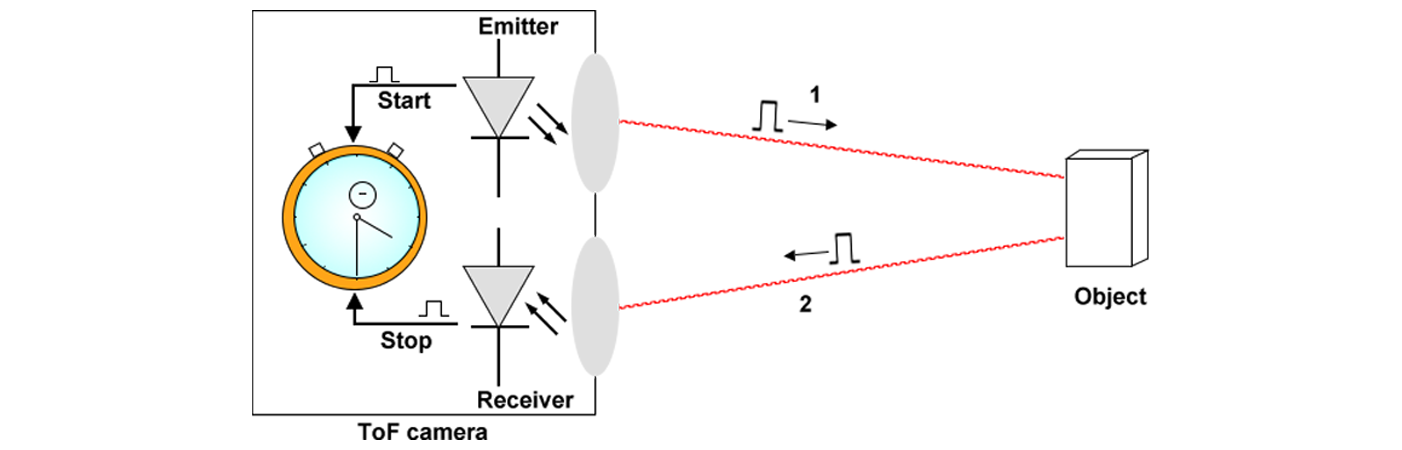
Системы ToF измеряют время возвращения инфракрасных лазерных импульсов для расчёта расстояний. Это прямое измерение временной модуляции позволяет создавать трёхмерные карты в реальном времени.
Преимущества:
Отличная производительность в реальном времени
Полное получение глубины поля
Компактный размер системы
Ограничения:
Ограниченная точность измерения
Подвержен влиянию многолучевого интерференции
Коммерческая распространенность: Широко применяется в потребительской электронике (VR/AR), системах безопасности и медицинском имAGINGе. Промышленное применение в основном ограничено избежанием препятствий AGV и базовой навигацией.
Руководство по сравнению и выбору технологии
Каждая технология превосходит другие в определенных сценариях:
Приложения, чувствительные к стоимости: СТЕРЕОЗРЕНИЕ
Сверхвысокие требования к точности: Лазерное линейное профилирование
Сканирование сложных поверхностей: СТРУКТУРИРОВАННЫЙ СВЕТ
Реальное время динамического измерения: Системы ToF





