

Контурное обнаружение в машинном зрении
В эпоху Индустрии 4.0 и умной автоматизации машинное зрение стало ключевой технологией, позволяя машинам «видеть» и интерпретировать визуальные данные с точностью, часто превосходящей человеческие возможности. Среди его ключевых функций определение контура очень важна: она извлекает формы границ объектов из цифровых изображений, создавая основу для таких задач, как распознавание объектов, измерение размеров, инспекция дефектов и манипуляции с роботами.
1. Что такое обнаружение контуров?
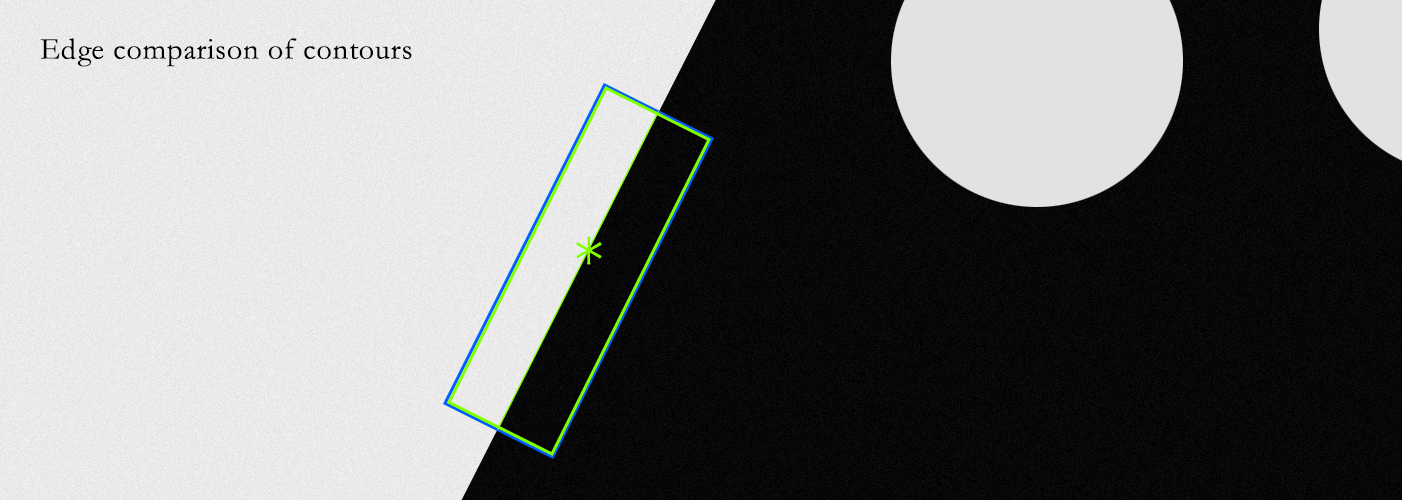
«Контур» в обработке изображений — это кривая, соединяющая непрерывные точки (вдоль границы объекта) с одинаковой интенсивностью или цветом, разделяя объект от фона. В отличие от дискретных краев (переходов свет-темнота на уровне пикселей), контуры представляют собой непрерывные петли (или открытые кривые для частичных объектов), которые описывают объект форма , а не просто изолированные изменения интенсивности.
Основная цель обнаружения контуров — упростить данные изображения: преобразование 2D-изображения в 1D-линии контуров позволяет машинам эффективно анализировать геометрию объекта (размер, углы, симметрию), не обрабатывая каждый пиксель — это критически важно для приложений, где одинаково важны скорость и точность.
2. Основные принципы
Обнаружение контуров основывается на двух ключевых шагах: предварительная обработка (повышение контраста между объектом и фоном) и извлечение контуров (определение точек границ). Эти шаги позволяют устранить недостатки исходного изображения, такие как шум, неравномерное освещение или низкий контраст, которые затрудняют распознавание границ.
2.1 Предварительная обработка
Исходные изображения редко имеют четкие границы, поэтому предварительная обработка играет ключевую роль:
Преобразование в оттенки серого : Большинство алгоритмов используют одноканальные изображения в градациях серого (упрощая данные с трех каналов RGB до одного, поскольку цвет зачастую не важен).
Снижение шума : Гауссово размытие сглаживает изображения с помощью гауссового ядра, уменьшая высокочастотный шум, при этом сохраняя основные перепады яркости — критично для предотвращения ложных краев из-за помех датчика или колебаний освещения.
Обнаружение краев : Определяет изменения интенсивности пикселей (края), из которых формируются контуры. Canny Edge Detector (многоэтапный метод: сглаживание, вычисление градиента, подавление немаксимумов, пороговая обработка с гистерезисом) является эталонным, обеспечивая тонкие и непрерывные края. Оператор Собеля, выделяющий горизонтальные/вертикальные края, подходит для более толстых границ.
Пороговая обработка : Преобразует карты краев в градациях серого в бинарные (черно-белые) изображения, где передний план (края объекта) обозначается как 1, а фон — как 0 — упрощает трассировку контуров.
2.2 Выделение контуров
После предварительной обработки алгоритмы отслеживают соединенные пиксели переднего плана, чтобы сформировать контуры. Freeman Chain Code широко используется: он представляет контуры в виде кодов направления (вверх, вниз, влево, вправо) относительно предыдущего пикселя, уменьшая объем хранения и обеспечивая простое сравнение форм. Библиотеки, такие как OpenCV, упрощают это с помощью функций, подобных findContours(), которая возвращает координаты пикселей контура и позволяет фильтрацию (по площади или соотношению сторон), чтобы удалить шумы.

3. Продвинутые методики
Традиционные методы работают в контролируемых условиях с высоким контрастом, но для реальных сценариев (неравномерное освещение, перекрывающиеся объекты) требуются продвинутые подходы:
Адаптивная бинаризация : Рассчитывает локальные пороговые значения для каждого пикселя (в отличие от одного глобального порога), идеально подходит для изображений с изменяющимся освещением (например, промышленные детали под фабричными лампами).
Обнаружение на основе глубокого обучения : Сверточные нейронные сети (CNN) напрямую извлекают границы из исходных изображений, пропуская ручную предварительную обработку. Модели, такие как HED (Holistically-Nested Edge Detector) и RCF (Richer Convolutional Features) объединение CNN-признаков на разных масштабах для получения контурных карт высокого разрешения, превосходно работающее в сложных сценах (медицинские изображения, захламленные среды)
4. Ключевые проблемы
Несмотря на прогресс, остаются реальные трудности:
Шум и освещение : Производственные цеха, слабое освещение или уличные условия вызывают разорванные/ложные контуры.
Перекрывающиеся/закрытые объекты : Сложенные детали объединяют контуры, из-за чего отдельные формы трудно различить.
Прозрачные/отражающие материалы : Стекло или металл рассеивают свет, создавая слабые/искаженные края.
Производительность в режиме реального времени : Промышленные задачи (контроль на конвейере) требуют 30+ кадров в секунду (FPS). Для выполнения требований по скорости глубокие модели требуют оптимизации (квантование, ускорение GPU).
5. Практическое применение
Обнаружение контуров способствует автоматизации в различных отраслях:
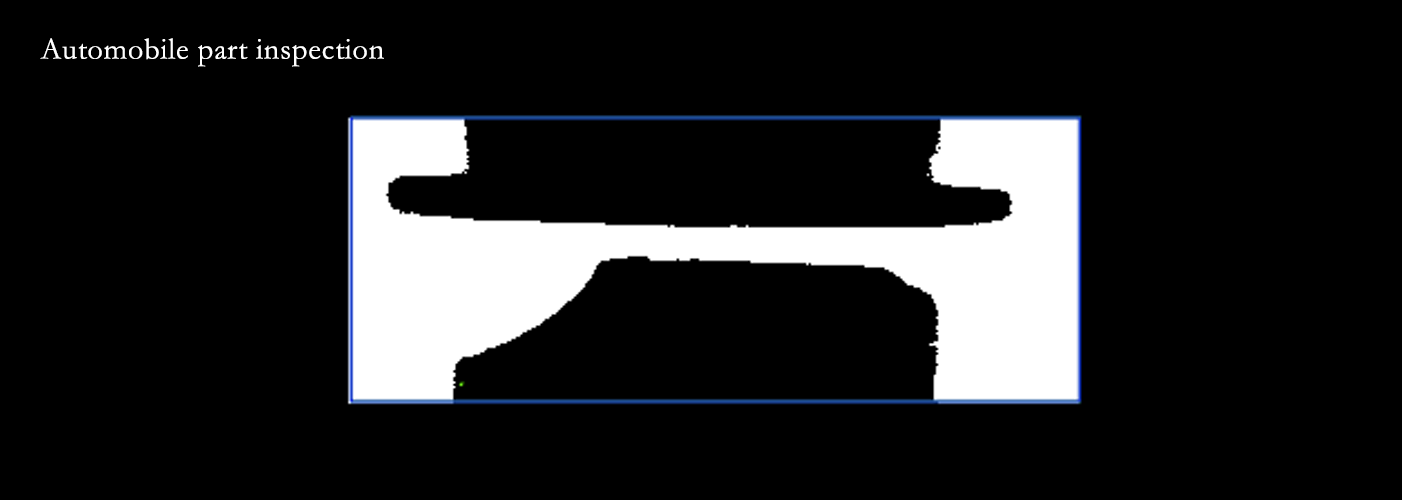
Промышленная инспекция качества : Проверка наличия дефектов (трещин, вмятин) в производстве. Например, в автомобилестроении проверяется, чтобы контуры компонентов двигателя (шестерен, прокладок) соответствовали проектным спецификациям, а детали, не соответствующие допускам, отбраковываются.
Роботизированная система захвата и размещения : Помогает роботам находить объекты. На складах роботизированные манипуляторы используют контуры для поиска упаковок на конвейерах, определения их центра/ориентации и корректировки захвата.
Медицинской визуализации : Сегментация анатомических структур (опухолей на КТ-снимках, границ клеток на гистологических срезах) для помощи в диагностике. Модели глубокого обучения хорошо справляются с переменными биологическими тканями.
Сельское хозяйство : Сортировка фруктов (яблок, апельсинов) по размеру/степени зрелости с помощью анализа контуров и обнаружение болезней сельскохозяйственных культур по изменениям контуров листьев.
Мониторинг трафика : Отслеживание транспортных средств, измерение потока или выявление аварий (через необычные контуры или неподвижные объекты) с использованием камер видеонаблюдения.
6. Перспективные тенденции
Три тенденции определят развитие обнаружения контуров:
Интеграция Edge AI : Легковесные модели (квантованные сверточные нейронные сети) на устройствах с обработкой на краю сети (промышленные камеры, дроны) позволяют выполнять обработку в реальном времени без зависимости от облака — критично для автономных роботов.
Мультимодальная интеграция : Комбинирование визуальных данных с LiDAR/тепловизионной съемкой улучшает обнаружение в сложных условиях (например, тепловизионная съемка усиливает видимость в условиях слабого освещения; LiDAR добавляет трехмерную глубину для перекрывающихся объектов).
Объяснимый искусственный интеллект (XAI) : Методы XAI помогут объяснить, как модели глубокого обучения обнаруживают контуры, что повысит доверие к ним в критически важных областях (например, диагностика заболеваний, инспекция в аэрокосмической отрасли).
Заключение
Обнаружение контуров в машинном зрении связывает необработанные изображения с полезной информацией и обеспечивает автоматизацию и контроль качества. От традиционного выявления краев до глубокого обучения эта технология развивалась, чтобы справляться со сложными задачами. По мере развития технологий она останется ключевой для интеллектуальных систем, делая машины более эффективными и надежными в различных отраслях.





