

Uporaba kamor za strojno vizijo v projektih za prepoznavanje registrskih tablic
Kamere za strojno vizijo so jedro sistemov za prepoznavanje registrskih tablic (LPR), saj določajo natančnost z zajemom visokokakovostnih slik registrskih tablic. V tem članku so na kratko obravnavani izbor teh kamer, usklajevanje z omrežno aplikacijo in praktična optimizacija za projekte LPR.
1. Izbor kamere: Temelj sistema LPR
Za sisteme LPR namenjene kamere za strojno vizijo zahtevajo visokokakovostno slikanje in odlično prilagodljivost različnim okoljskim razmeram. Ključni kriteriji vključujejo ločljivost (2 megapiksela za kratke razdalje, 4–5 megapixelov za dolge razdalje), hitrost slike (15–30 FPS pri nizkih hitrostih, 30–60 FPS pri visokih hitrostih) ter občutljivost na svetlobo (občutljivost ≤ 0,01 luksa, širina dinamičnega obsega ≥ 120 dB, integrirana IR osvetlitev).
Objektivi naj ustrezajo razdalji zajemanja (8–12 mm za kratke razdalje, 12–25 mm za dolge razdalje, zoom za spremenljive scenarije) ter kotu med kamero in vozilom (≤ 30°). Vmesniki, kot so Gigabit Ethernet (za dolge razdalje) in USB 3.0 (za majhne sisteme), skupaj z podporo standardu GenICam, poenostavljajo integracijo sistema.
2. Usklajevanje programske opreme: Uresničitev pametnega prepoznavanja
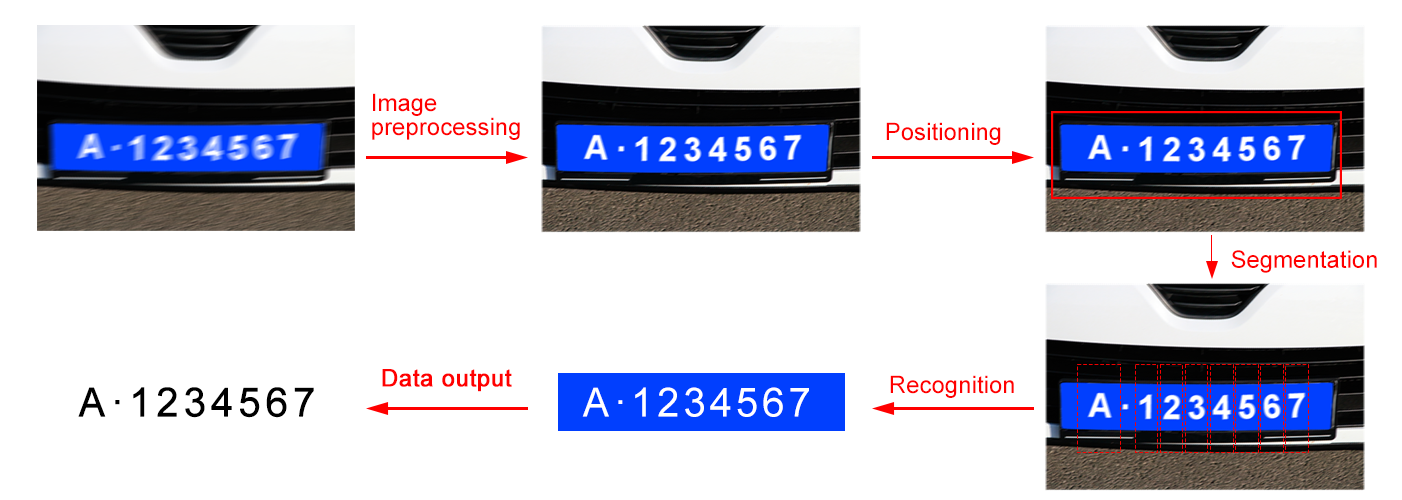
Kamere za strojno vizijo zagotavljajo podatke o slikah, programska oprema za prepoznavanje registrskih tablic pa tvori zaprt zanki s predobdelavo (izboljšanje kakovosti slike), določitvijo položaja (lokacija registrskih tablic), segmentacijo (ločevanje znakov), prepoznavo (pretvorba slik v besedilo) in izhodom podatkov.
Zmogljivost programske opreme je tesno povezana s kakovostjo kamere: bolj jasne slike zmanjšujejo težavo predobdelave in izboljšujejo natančnost prepoznavanja, medtem ko visoke hitrosti zajema slike z omogočajo primerjavo več sličic za bolj stabilne rezultate ter integracijo z nadrejenimi sistemi za praktično uporabo.
3. Vprašanje: Sklep
Povzetek: Kamere za strojno vizijo so ključ za stabilen in učinkovit delovanje projektov za prepoznavo registrskih tablic (LPR), pri čemer se izbor teh kamer (z osredotočenjem na ločljivost, hitrost slike, svetlobne lastnosti, objektive in vmesnike) ter koordinacija programske opreme med seboj ojačujeta. Kar zadeva ceno, ta variira glede na specifikacije kamere – osnovni modeli z razločljivostjo 2 megapiksela so cenovno ugodni za majhne parkirišča, medtem ko so visokoučinkovitostne kamere z razločljivostjo 4–5 megapikselov in naprednimi funkcijami bolj primerni za zahtevne scenarije, kot so avtoceste, pri čemer se uravnotežijo stroški in zahteve projekta, da se doseže optimalen učinek uporabe LPR.





