

เทคโนโลยี 2D, 2.5D และ 3D ในระบบการมองเห็นของเครื่องจักร
เทคโนโลยีระบบการมองเห็นของเครื่องจักรเป็นเสาหลักสำคัญของการผลิตอัตโนมัติและระบบการผลิตอัจฉริยะในยุคอุตสาหกรรมปัจจุบัน ถูกนำไปใช้กันอย่างแพร่หลายในงานตรวจสอบ งานนำทาง และการควบคุมคุณภาพ รวมถึงสาขาอื่นๆ อีกมากมาย โดยเฉพาะเทคโนโลยีระบบมองเห็นแบบ 2D, 2.5D และ 3D ซึ่งเป็นสามเทคโนโลยีหลักที่มีลักษณะเฉพาะและสถานการณ์การใช้งานที่แตกต่างกัน
I. เทคโนโลยีระบบมองเห็นแบบ 2D: การมองเห็นในระนาบ ใช้งานง่ายและมีประสิทธิภาพ
1. ลักษณะทางเทคนิค
เทคโนโลยีระบบมองเห็นแบบ 2D ประมวลผลภาพในระนาบเดียว คล้ายกับการถ่ายภาพด้วยกล้องถ่ายรูป จากนั้นจึงดำเนินการให้เสร็จสมบูรณ์โดยการวิเคราะห์ภาพถ่ายนี้ ขั้นตอนหลักๆ ได้แก่
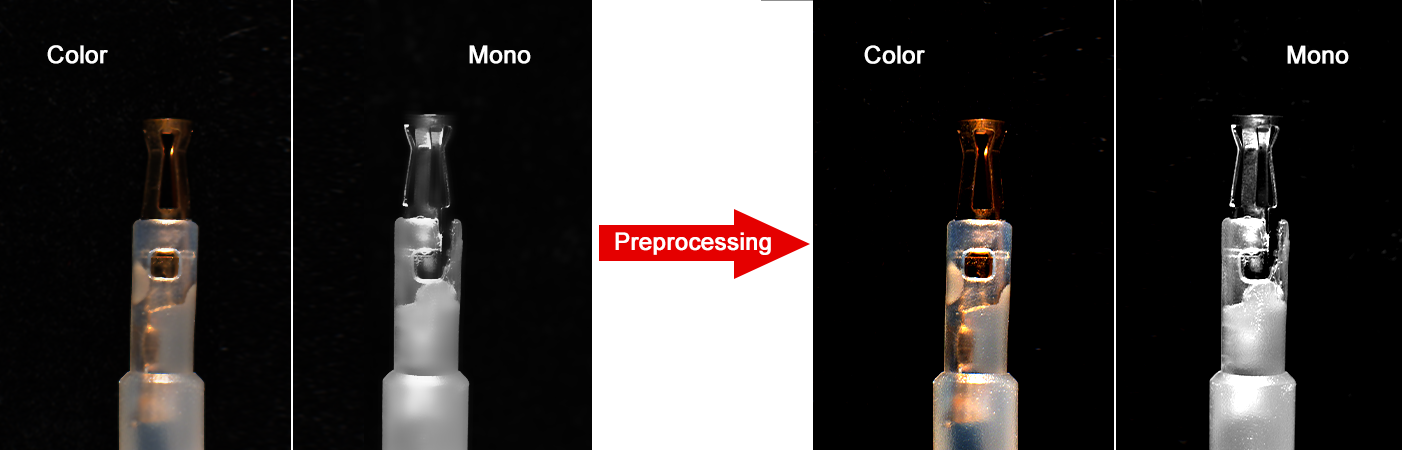
การรับภาพ: ใช้กล้องอุตสาหกรรมในการถ่ายภาพสีเทา (grayscale) หรือภาพสี โดยมีแสงช่วยให้ภาพถ่ายชัดเจนยิ่งขึ้น
การเตรียมข้อมูล: ทำให้ข้อมูลสำคัญในภาพชัดเจนขึ้นด้วยการกรองหรือเพิ่มความคมชัด
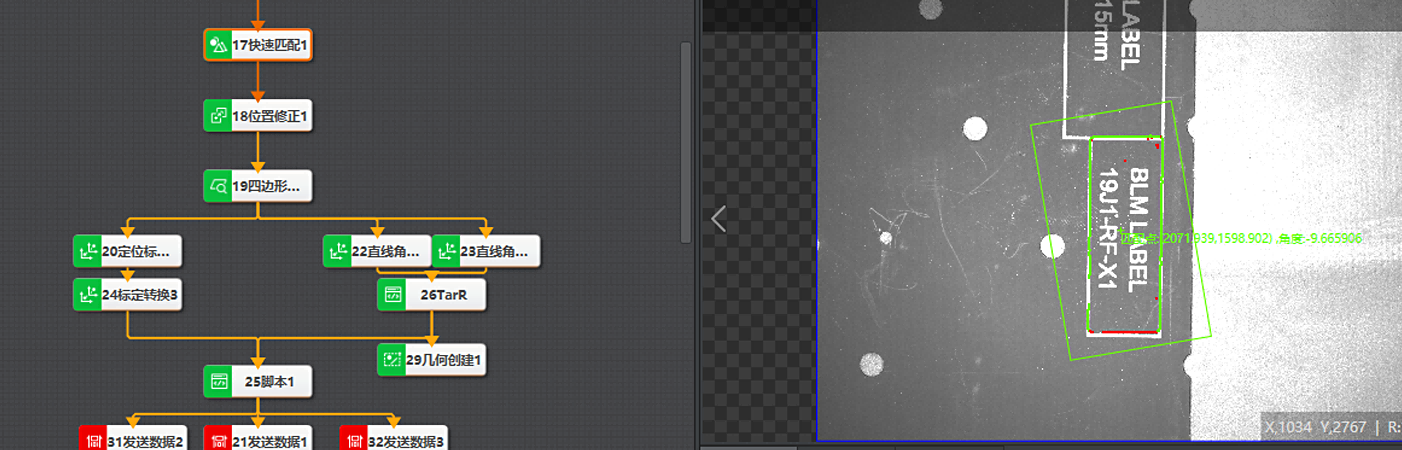
การแยกคุณลักษณะ: ระบุคุณลักษณะ เช่น เส้นตรง รูปทรง หรือจุดมุมในภาพถ่าย
การจดจำรูปแบบ: ใช้อัลกอริทึมเพื่อวินิจฉัยว่าคุณลักษณะเหล่านี้คืออะไร เช่น ข้อความหรือลวดลาย
การวัดและการกำหนดตำแหน่ง: คำนวณขนาดและตำแหน่งของวัตถุ
การตรวจจุดบกพร่อง: เปรียบเทียบกับภาพมาตรฐานเพื่อหาจุดที่มีปัญหา
2. สถานการณ์ที่ใช้งานได้
เทคโนโลยีวิชัน 2 มิติ เหมาะสำหรับงานที่ต้องการมองเห็นเพียงพื้นผิว และไม่ต้องการความหนาของวัตถุ เช่น
ตรวจสอบว่าฉลากสินค้าในโรงงานถูกพิมพ์อย่างถูกต้องหรือไม่
สแกนบาร์โค้ดบนพัสดุโลจิสติกส์
ตรวจจับรอยขีดข่วนหรือคราบเปื้อนบนพื้นผิวของแผงวงจร
3. ข้อดีและข้อจํากัด
ข้อดี: อุปกรณ์เรียบง่าย ต้นทุนต่ำ การประมวลผลรวดเร็ว เหมาะสำหรับการดำเนินงานปริมาณมากอย่างรวดเร็ว
ข้อจำกัด: ไม่สามารถทราบความสูงหรือความลึกของวัตถุ ไร้ประสิทธิภาพต่อรูปร่างที่ซับซ้อนหรือวัตถุที่ถูกบดบัง
II. เทคโนโลยีวิชัน 2.5 มิติ: เพิ่มความสูง เทคนิคสเตอริโอแบบกึ่งหนึ่ง
1. ลักษณะทางเทคนิค
เทคโนโลยีวิชัน 2.5 มิติ เพิ่มข้อมูลอีกหนึ่งมิติเข้าไปในแบบ 2 มิติ นั่นคือความสูงของวัตถุ แม้จะไม่ใช่แบบจำลอง 3 มิติที่สมบูรณ์ แต่ใช้เลเซอร์หรือกล้องวัดความลึกเพื่อระบุความสูงในแต่ละจุดของภาพแบบสองมิติ วิธีการที่พบได้ทั่วไปมีดังนี้:
การวัดรูปร่าง: สแกนพื้นผิวของวัตถุด้วยเลเซอร์เพื่อวัดการเปลี่ยนแปลงความสูง
แผนภาพความลึก: ใช้กล้องพิเศษเพื่อสร้างภาพที่มีข้อมูลความสูง
พูดง่ายๆ คือ 2.5 มิติ เปรียบเสมือนการเพิ่ม "ป้ายบอกความสูง" เข้าไปในรูปถ่ายแบบแบน แต่สามารถมองได้เพียงมุมเดียวเท่านั้น
2. สถานการณ์ที่สามารถนำไปใช้ได้
2.5 มิติ เหมาะกับสถานการณ์ที่ต้องการความสูงของวัตถุ แต่ไม่จำเป็นต้องมีรูปร่างแบบ 3 มิติสมบูรณ์ เช่น:
ตรวจสอบว่าความสูงของชิ้นส่วนบนแผงวงจรเป็นปกติหรือไม่
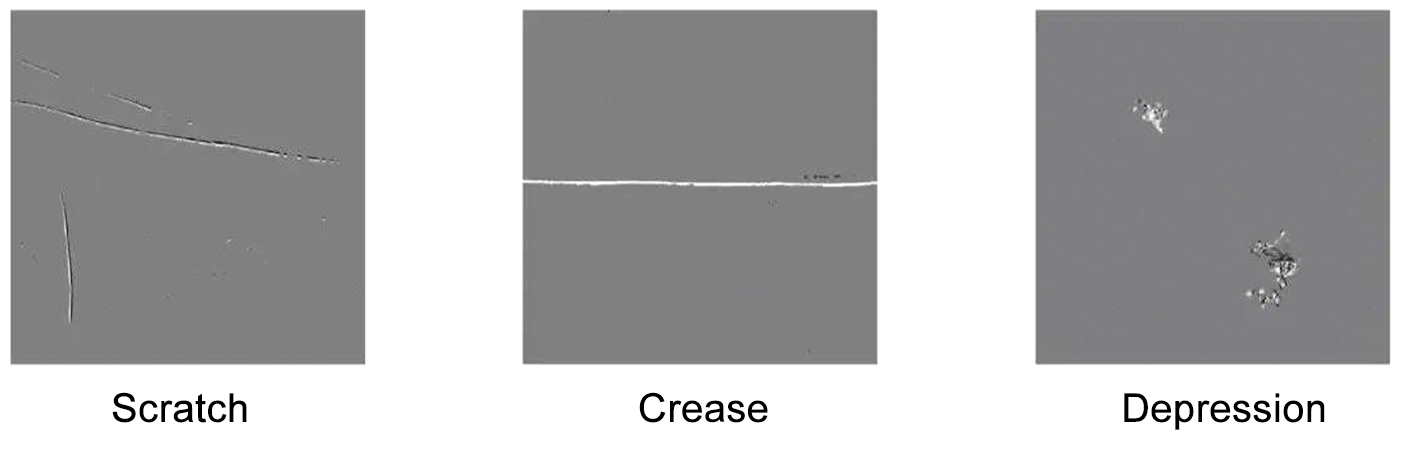
วัดว่าพื้นผิวของวัตถุเรียบหรือมีความนูนหรือไม่
ช่วยให้หุ่นยนต์ประเมินความสูงของสิ่งกีดขวางขณะเดินทาง
3. ข้อดีและข้อจำกัด
ข้อดี: มีข้อมูลความสูงมากกว่า 2D แต่ราคาถูกกว่าและง่ายกว่า 3D; ให้ประสิทธิภาพคุ้มค่า
ข้อจำกัด: มองได้เพียงมุมเดียว; ไม่สามารถจัดการโครงสร้าง 3D ที่ซับซ้อน หรือการบังกันของหลายพื้นผิว
III. เทคโนโลยีวิชัน 3 มิติ: ภาพคู่สมบูรณ์ มีข้อมูลครบถ้วน
1. ลักษณะทางเทคนิค
เทคโนโลยีวิชัน 3 มิติสามารถแสดงรูปร่างและตำแหน่งในอวกาศของวัตถุได้อย่างสมบูรณ์ เหมือนกับการวาดรูปแบบพาโนรามาของวัตถุ วิธีการดำเนินการมีดังนี้:
วิชันสเตอริโอ: ใช้กล้องหลายตัวถ่ายภาพจากมุมที่ต่างกัน และคำนวณความลึก
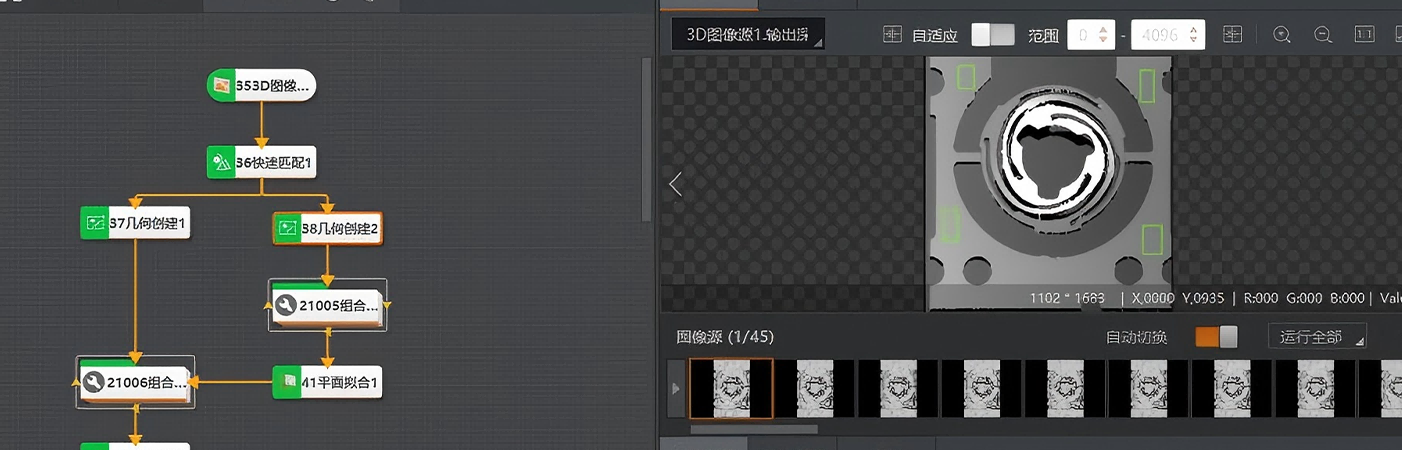
เลเซอร์สแกน: สแกนพื้นผิวของวัตถุด้วยเลเซอร์ เพื่อบันทึกรูปร่าง
แสงโครงสร้าง: ฉายลวดลายแสงไปยังวัตถุ และสร้างรูปร่าง 3 มิติขึ้นใหม่จากความเปลี่ยนแปลงของลวดลาย
เวลาการเดินทาง (Time of Flight - ToF): วัดเวลาที่แสงถูกส่งออกไปและสะท้อนกลับมาเพื่อคำนวณระยะทาง
การสร้างภาพ 3 มิติ (3D Reconstruction): ใช้รูปภาพหลายภาพ หรือข้อมูลจุดประสานกันสร้างแบบจำลอง 3 มิติ
2.สถานการณ์ที่ใช้ได้
เทคโนโลยี 3D เหมาะสำหรับงานที่ต้องการข้อมูล 3D ที่แม่นยำ เช่น:
แนะนำหุ่นยนต์ให้จับวัตถุที่มีรูปร่างไม่สม่ำเสมอ
ตรวจสอบว่าชิ้นส่วนซับซ้อนถูกประกอบอย่างถูกต้องหรือไม่
วัดปริมาตรของพัสดุในการขนส่งเพื่อเพิ่มประสิทธิภาพการใช้พื้นที่
สร้างแผนที่แบบสเตอริโอของสภาพแวดล้อมในการขับขี่อัตโนมัติ
3.ข้อดีและข้อจำกัด
ข้อดี: ให้ข้อมูลเชิงพื้นที่อย่างสมบูรณ์; รับมือกับสถานการณ์ซับซ้อนและความต้องการความแม่นยำสูง
ข้อจำกัด: อุปกรณ์ซับซ้อน ราคาสูง ความเร็วในการประมวลผลช้า ต้องใช้ทรัพยากรการคำนวณมากขึ้น
IV. การเปรียบเทียบ 2D, 2.5D และ 3D: เห็นได้ชัดในพริบตา
1. การเปรียบเทียบคุณสมบัติทางเทคนิค
|
ด้าน |
2D Vision |
2.5D Vision |
วิชั่น 3D |
|
ประเภทข้อมูล |
ภาพแบบระนาบ |
ภาพแบบระนาบ + ความสูง |
โมเดล 3 มิติสมบูรณ์ |
|
ข้อมูลความลึก |
ไม่มี |
ความลึกจากมุมเดียว |
ความลึกจากหลายมุม |
|
ความซับซ้อนของอุปกรณ์ |
ง่าย |
ปานกลาง |
สับสน |
|
ต้นทุน |
ต่ำ |
ปานกลาง |
สูง |
|
ความเร็วในการประมวลผล |
เร็ว |
ปานกลาง |
ช้า |
2. ปัญหาที่แก้ไข
การมองเห็นแบบ 2D: เหมาะสำหรับงานในระนาบ เช่น อ่านบาร์โค้ด ตรวจสอบสี/ข้อความ
การมองเห็นแบบ 2.5D: แก้ปัญหาง่ายๆ ที่เกี่ยวข้องกับความสูง เช่น ตรวจสอบความบกพร่องบนพื้นผิว หรือตรวจสอบความสูงของชิ้นส่วน
การมองเห็นแบบ 3D: เหมาะสำหรับงานที่ซับซ้อนแบบ 3 มิติ เช่น ระบุตำแหน่งวัตถุที่ไม่สม่ำเสมอ หรือวิเคราะห์ความสัมพันธ์เชิงพื้นที่
3. ตัวอย่างการประยุกต์ใช้งานจริง
(1) อุตสาหกรรมยานยนต์:
2D: ตรวจสอบสีตัวถังรถยนต์ และเครื่องหมายบนชิ้นส่วน
2.5D: วัดระดับความเรียบพื้นผิวตัวถังรถยนต์
3D: นำทางหุ่นยนต์ในการเชื่อมหรือจัดการชิ้นส่วน
(2) อุตสาหกรรมอิเล็กทรอนิกส์:
2D: ตรวจสอบการบัดกรีพื้นผิวของแผงวงจร
2.5D: ตรวจจับความสูงของชิ้นส่วน
3D: ตรวจสอบการประกอบชิ้นส่วนที่ซับซ้อน
(3) การขนส่ง:
2D: สแกนฉลากบรรจุภัณฑ์
2.5D: วัดความสูงของบรรจุภัณฑ์
3D: คำนวณปริมาตรของบรรจุภัณฑ์ เพื่อเพิ่มประสิทธิภาพการจัดเก็บ
V. เทรนด์เทคโนโลยี: การผสานรวมและการพัฒนา
เทคโนโลยีการมองเห็นของเครื่องจักรในปัจจุบันพัฒนาอย่างรวดเร็ว 2D, 2.5D และ 3D มีแนวโน้มเข้าหากันมากขึ้น:
การใช้งาน 2.5D แพร่หลายขึ้น: กล้องตรวจจับความลึกมีราคาถูกลง และเป็นทางเลือกที่เหมาะสมสำหรับงานหลากหลายประเภท
การเสริมพลังด้วย AI: ใช้ AI วิเคราะห์ภาพและข้อมูล 3D เพื่อให้ได้ผลลัพธ์ที่แม่นยำมากยิ่งขึ้น
การผสานเทคโนโลยี: ระบบบางอย่างสามารถสลับระหว่างสามเทคโนโลยีได้อย่างยืดหยุ่นตามลักษณะงาน เพื่อเพิ่มประสิทธิภาพ
VI. สรุป: การเลือกใช้เทคโนโลยีที่เหมาะสมคือสิ่งสำคัญ
เทคโนโลยีระบบภาพแบบ 2D, 2.5D และ 3D ต่างมีจุดเด่นเฉพาะตัว:
2D: ใช้งานง่ายและรวดเร็ว เหมาะสำหรับงานที่พื้นผิว
2.5D: เพิ่มข้อมูลความสูง เหมาะสำหรับงานที่มีความต้องการระดับปานกลาง
3D: มีฟังก์ชันที่ทรงพลัง เหมาะสำหรับงาน 3D ที่ซับซ้อน





