

คู่มือการใช้กล้องระดับบอร์ดสำหรับระบบการมองเห็นแบบฝังตัว (Embedded Vision Systems)
สำหรับผู้ผลิตรถยนต์ (OEM) ผู้รวมระบบ (system integrators) และทีมวิศวกรด้านระบบการมองเห็นแบบฝังตัว (embedded vision) กล้องระดับบอร์ดเป็นองค์ประกอบพื้นฐานที่สำคัญในการสร้างระบบการมองเห็นแบบฝังตัวที่มีขนาดกะทัดรัด ใช้งานได้เชื่อถือได้ และมีประสิทธิภาพสูง คู่มือฉบับนี้นำเสนอเกณฑ์สำคัญในการเลือกใช้ โปรโตคอลอินเทอร์เฟซ ข้อกำหนดของระบบนิเวศซอฟต์แวร์ และแนวทางปฏิบัติที่ดีที่สุดสำหรับการบูรณาการทางกายภาพของกล้องระดับบอร์ด เพื่อช่วยให้ทีมวิศวกรรมของคุณสามารถปรับแต่งการออกแบบระบบการมองเห็นแบบฝังตัวให้เหมาะสมที่สุดสำหรับการใช้งานในภาคอุตสาหกรรม การแพทย์ ยานยนต์ และโครงสร้างพื้นฐานอัจฉริยะ
เกณฑ์สำคัญในการเลือกกล้องระดับบอร์ด
การสมดุลระหว่างประสิทธิภาพของเซนเซอร์กับข้อจำกัดด้านพลังงานและอุณหภูมิ
การเลือก กล้องระดับบอร์ด ต้องมีการปรับแต่งความสามารถของเซ็นเซอร์ให้สอดคล้องกับงบประมาณด้านพลังงานและขีดจำกัดความร้อน เซ็นเซอร์ความละเอียดสูง (เช่น 12 ล้านพิกเซลขึ้นไป) ใช้พลังงานมากกว่าเซ็นเซอร์ความละเอียด 2–5 ล้านพิกเซล 30–50% และสร้างความร้อนซึ่งส่งผลเสียต่อความน่าเชื่อถือในระบบแบบไม่มีพัดลม ระบบวิชั่นอุตสาหกรรมที่ติดตั้งในพื้นที่จำกัดจะได้รับประโยชน์สูงสุดจากเซ็นเซอร์ที่มีสัญญาณรบกวนต่ำ ซึ่งใช้พลังงานน้อยกว่า 1 วัตต์ พร้อมรักษาอัตราส่วนสัญญาณต่อสัญญาณรบกวน (SNR) ไว้ที่มากกว่า 40 เดซิเบล วิศวกรควรตรวจสอบสมรรถนะด้านความร้อนโดยใช้ภาพถ่ายอินฟราเรดในระหว่างขั้นตอนการสร้างต้นแบบ — อุณหภูมิที่คงที่เกิน 85°C จะเร่งการเสื่อมสภาพของเซ็นเซอร์เพิ่มขึ้น 4 เท่า (วารสารระบบฝังตัว ปี 2023)

การจับคู่ความละเอียด อัตราเฟรม และช่วงไดนามิกให้สอดคล้องกับความต้องการของแอปพลิเคชัน
การจัดแนวข้อกำหนดของกล้องให้ตรงกับความต้องการในการปฏิบัติงานอย่างแม่นยำ จะช่วยป้องกันการวางระบบเกินความจำเป็นและลดการเพิ่มต้นทุน โปรดพิจารณาคู่ค่าที่สำคัญเหล่านี้:
| การประยุกต์ใช้ | สเปคที่ดีที่สุด | เหตุผล |
|---|---|---|
| หุ่นยนต์หยิบและวาง (Robotic Pick-and-Place) | 5 ล้านพิกเซล @ 60 เฟรมต่อวินาที ช่วงไดนามิก 120 เดซิเบล | รักษาสมดุลระหว่างความเร็วในการระบุชิ้นส่วนกับสภาวะแสงที่แปรผันในคลังสินค้า |
| การส่องกล้องทางการแพทย์ | 1080p @ 30 เฟรมต่อวินาที ช่วงไดนามิกมากกว่า 75 เดซิเบล | ลดการเบลอจากการเคลื่อนไหวในพื้นที่แคบซึ่งมีแสงน้อย ขณะเดียวกันก็ลดความกว้างของแถบข้อมูล |
| การตรวจสอบจราจร | 4K @ 24 เฟรมต่อวินาที, WDR (140 เดซิเบล) | จับภาพป้ายทะเบียนรถได้ชัดเจนในช่วงรุ่งสาง/พลบค่ำ โดยไม่มีการเบลอจากความเคลื่อนไหว |
โหมดความไดนามิกเรนจ์สูง (HDR) มีความจำเป็นอย่างยิ่งในสถานที่ที่ระดับแสงเปลี่ยนแปลงอยู่ตลอดเวลา แม้ว่าจะเพิ่มความหน่วงในการประมวลผล 15–20 มิลลิวินาทีก็ตาม การเลือกอัตราเฟรมต้องสอดคล้องกับความเร็วของวัตถุ: งานตรวจสอบสายพานลำเลียงที่ความเร็ว 2 เมตรต่อวินาที ต้องใช้อัตราเฟรมไม่น้อยกว่า 120 เฟรมต่อวินาที เพื่อจำกัดการเบลอจากความเคลื่อนไหวให้น้อยกว่า 0.5 พิกเซล
โปรโตคอลอินเทอร์เฟซสำหรับการผสานรวมกล้องระดับบอร์ดอย่างเชื่อถือได้
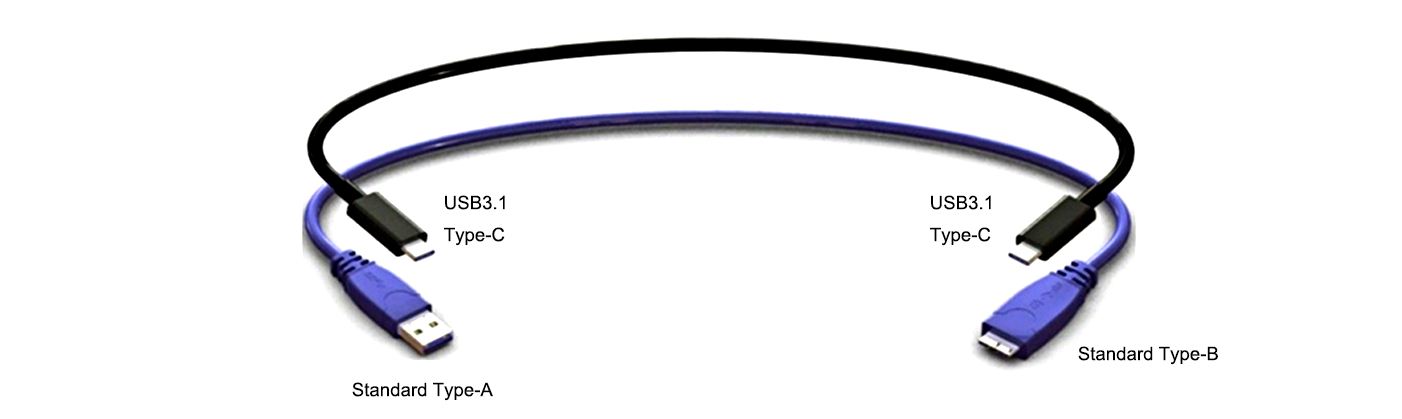
USB 3.1, MIPI CSI-2 และ LVDS: แบนด์วิดธ์ ความหน่วง และความเหมาะสมในการใช้งานจริง
การเลือกโปรโตคอลอินเทอร์เฟซที่เหมาะสมที่สุดสำหรับกล้องระดับบอร์ด จำเป็นต้องพิจารณาสมดุลระหว่างแบนด์วิดท์ ความหน่วงเวลา (latency) และข้อจำกัดด้านสิ่งแวดล้อม USB 3.1 มีอัตราการรับส่งข้อมูลสูงสุด 5 Gbps พร้อมความสะดวกในการใช้งานแบบปลั๊กแอนด์เพลย์ (plug-and-play) ซึ่งเหมาะอย่างยิ่งสำหรับการถ่ายภาพทางการแพทย์หรือเครื่องบริการตนเอง (kiosks) ที่ระยะความยาวของสายเคเบิลไม่เกิน 3 เมตร MIPI CSI-2 ให้แบนด์วิดท์ที่ปรับขนาดได้ (สูงสุด 6 Gbps ผ่านช่องทาง 4 ช่อง) และการใช้พลังงานต่ำมาก จึงกลายเป็นมาตรฐานที่ยอมรับโดยทั่วไปสำหรับระบบมือถือและระบบฝังตัวที่ใช้สถาปัตยกรรม ARM LVDS มีความสามารถในการต้านทานสัญญาณรบกวนได้ดีเยี่ยมในสภาพแวดล้อมที่มีสัญญาณรบกวนทางไฟฟ้าสูง เช่น ระบบอัตโนมัติในโรงงาน แม้กระนั้น แบนด์วิดท์ต่ำกว่า 1 Gbps ของ LVDS ก็อาจจำกัดการใช้งานในกรณีที่ต้องการความละเอียดสูง สำหรับหุ่นยนต์แบบเรียลไทม์ ความหน่วงเวลาของ MIPI CSI-2 ที่ต่ำกว่า 5 มิลลิวินาที จะเหนือกว่าช่วงความหน่วงเวลาของ USB 3.1 ที่อยู่ระหว่าง 10–20 มิลลิวินาที ดังนั้นควรจัดลำดับความสำคัญของโปรโตคอลตามความต้องการในการนำไปใช้งานจริง: ใช้ USB 3.1 สำหรับการพัฒนาต้นแบบอย่างรวดเร็ว ใช้ MIPI สำหรับอุปกรณ์ขอบ (edge devices) ที่มีข้อจำกัดด้านพลังงาน และใช้ LVDS สำหรับเครื่องจักรอุตสาหกรรม
ระบบนิเวศซอฟต์แวร์และการสนับสนุน SDK สำหรับกล้องระดับบอร์ด
SDK ที่รองรับหลายแพลตฟอร์ม (Spinnaker, Aravis) และความเข้ากันได้กับ RTOS บนสถาปัตยกรรม ARM/ x86
ชุดพัฒนาซอฟต์แวร์ (SDK) ที่มีความแข็งแกร่งเป็นสิ่งจำเป็นอย่างยิ่งในการเร่งการนำระบบวิชันไปใช้งานจริงร่วมกับกล้องระดับบอร์ด โซลูชันแบบข้ามแพลตฟอร์ม เช่น Spinnaker และ Aravis ให้ส่วนติดต่อมาตรฐานที่ซ่อนความซับซ้อนของฮาร์ดแวร์ไว้ ทำให้สามารถย้ายโค้ดไปใช้งานได้ระหว่างสภาพแวดล้อมการพัฒนาและสภาพแวดล้อมการผลิตได้อย่างราบรื่น Spinnaker รองรับสถาปัตยกรรมหลากหลายประเภท รวมถึง x86, ARM และระบบปฏิบัติการแบบเรียลไทม์ (RTOS) ผ่าน API แบบรวมศูนย์ ซึ่งช่วยให้วิศวกรสามารถสร้างต้นแบบบนคอมพิวเตอร์เดสก์ท็อปแล้วนำไปปรับใช้งานได้โดยไม่ต้องเปลี่ยนแปลงบนอุปกรณ์ฝังตัวอย่างไร้รอยต่อ ในขณะเดียวกัน โครงสร้างพื้นฐานแบบโอเพนซอร์สเช่น Aravis ก็ให้การรองรับมาตรฐาน GenICam ที่ไม่ขึ้นกับผู้ผลิตสำหรับระบบที่ใช้ Linux ความยืดหยุ่นของสถาปัตยกรรมนี้ช่วยลดอุปสรรคในการผสานรวมลง 40% ตามผลการศึกษาเกี่ยวกับการนำระบบวิชันฝังตัวมาใช้งาน (2023) ประเด็นสำคัญที่ควรพิจารณา ได้แก่ ความสามารถในการทำงานร่วมกับ RTOS เพื่อให้ได้ความหน่วงเวลาที่แน่นอนในระบบควบคุมอุตสาหกรรม การรองรับหลายสถาปัตยกรรมเพื่อเตรียมความพร้อมสำหรับการเปลี่ยนแปลงฮาร์ดแวร์ในอนาคต และเลเยอร์การซ่อนความซับซ้อน (abstraction layers) ที่ช่วยให้การพัฒนาไดรเวอร์ทำได้ง่ายขึ้น ความเข้ากันได้กับสภาพแวดล้อม RTOS แบบเบาบางยังมั่นใจได้ถึงการทำงานที่เชื่อถือได้ในแอปพลิเคชันที่มีทรัพยากรจำกัด เช่น หุ่นยนต์เคลื่อนที่อัตโนมัติหรืออุปกรณ์ทางการแพทย์ ซึ่งการดำเนินงานอย่างต่อเนื่องนั้นเป็นสิ่งที่ขาดไม่ได้
การรวมเข้าด้วยกันทางกายภาพ: รูปร่างและขนาด (Form Factor), การติดตั้งเลนส์ (Lens Mounting), และความทนทานต่อสภาพแวดล้อม (Environmental Robustness)
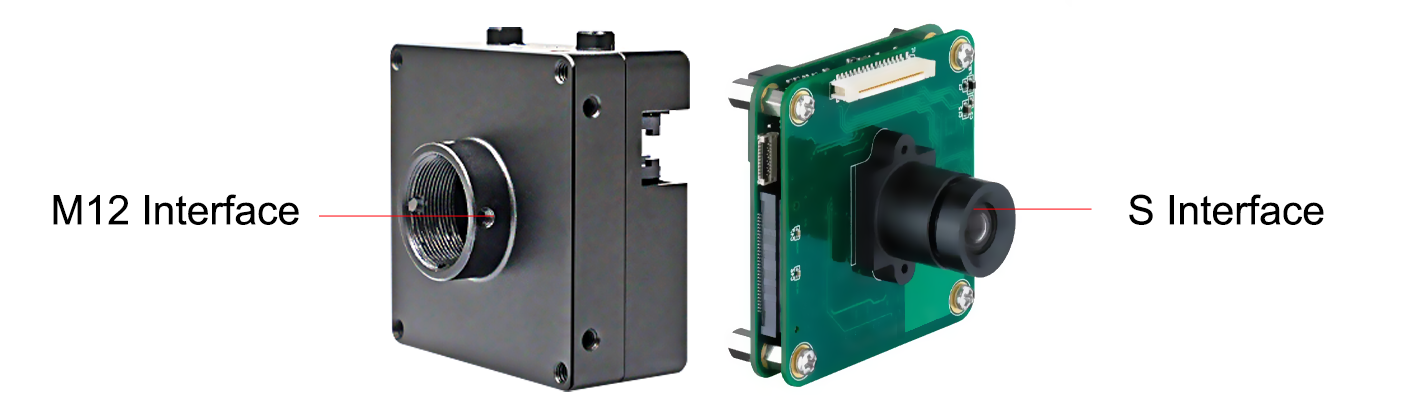
อินเทอร์เฟซแบบ M12, S-Mount และแบบกำหนดเอง — มุมมอง (Field-of-View) และความยืดหยุ่นด้านแสง (Optical Flexibility)
อินเทอร์เฟซสำหรับการติดตั้งเลนส์มีผลโดยตรงต่อประสิทธิภาพด้านแสงในระบบการมองเห็นแบบฝัง (embedded vision systems) อินเทอร์เฟซแบบ M12 ที่ได้รับการมาตรฐานช่วยให้สามารถปรับมุมมอง (FOV) ได้อย่างคุ้มค่าสำหรับการใช้งานในอุตสาหกรรม ขณะที่อินเทอร์เฟซแบบ S-Mount เหมาะสำหรับโซลูชันที่มีข้อจำกัดด้านพื้นที่ ส่วนอินเทอร์เฟซแบบกำหนดเองสามารถรองรับความต้องการเฉพาะด้านมุมมอง เช่น มุมกว้างพิเศษ (ultra-wide angles) หรือการจัดวางแบบเทเลเซนตริก (telecentric configurations) ปัจจัยด้านแสงที่สำคัญ ได้แก่:
- การควบคุมการบิดเบือน : การบิดเบือนแบบถัง (barrel distortion) ต่ำกว่า 0.1% ช่วยรักษาความแม่นยำในการวัดสำหรับงานเมโทรโลยี
- เสถียรภาพทางกล : กลไกการล็อก (locking mechanisms) ป้องกันการเปลี่ยนตำแหน่งโฟกัส (focus drift) ระหว่างสัมผัสกับแรงสั่นสะเทือนระดับ 15G
- ความไวต่อแสงช่วงใกล้อินฟราเรด (NIR) : การรองรับความยาวคลื่น 850 นาโนเมตร ช่วยเพิ่มประสิทธิภาพการทำงานในสภาพแสงน้อย
- การเสริมความแข็งแรงต่อสภาพแวดล้อม : ซีลที่ผ่านการรับรองตามมาตรฐาน IP67 ป้องกันไม่ให้อนุภาคต่าง ๆ เข้าสู่ตัวเครื่อง
การออกแบบด้านความร้อนและการปฏิบัติตามข้อกำหนดด้าน EMC สำหรับการติดตั้งแบบไม่มีพัดลม (fanless) และไม่มีเคสครอบ (unhoused)
การจัดการความร้อนกลายเป็นสิ่งสำคัญอย่างยิ่งเมื่อใช้งานกล้องระดับบอร์ดในสภาพแวดล้อมที่ไม่มีพัดลมซึ่งมีอุณหภูมิสูงกว่า 60°C กลยุทธ์ที่มีประสิทธิภาพ ได้แก่ แผ่นกระจายความร้อนทำจากทองแดงที่สามารถถ่ายเทภาระความร้อนได้มากกว่า 5 วัตต์ วัสดุเชื่อมต่อที่มีเสถียรภาพทางความร้อนซึ่งรักษาความสมบูรณ์ของเซนเซอร์ได้ในช่วงอุณหภูมิตั้งแต่ –40°C ถึง 85°C และการออกแบบเลย์เอาต์ของแผงวงจร (PCB) ให้แยกส่วนประกอบที่สร้างความร้อนออกจากเซนเซอร์ภาพอย่างเหมาะสม ความเข้ากันได้ทางแม่เหล็กไฟฟ้า (EMC) ช่วยให้มั่นใจได้ว่าระบบจะทำงานได้อย่างเชื่อถือได้ในสภาพแวดล้อมอุตสาหกรรมที่มีสัญญาณรบกวนทางไฟฟ้าสูง การปฏิบัติตามมาตรฐานหลักจึงเป็นสิ่งจำเป็น:
| ข้อกำหนด | มาตรฐาน | การใช้งานที่สำคัญยิ่ง |
|---|---|---|
| การปล่อยคลื่นแม่เหล็กไฟฟ้าแบบไร้สาย | FCC Part 15 Class B | การวินิจฉัยทางการแพทย์ |
| ระบบภูมิคุ้มกัน | IEC 61000-4-3 | การประกอบรถยนต์ |
| การป้องกัน ESD | IEC 61000-4-2 | การแปรรูปอาหาร |
การต่อกราวด์อย่างเหมาะสมและเปลือกหุ้มที่มีการป้องกันการรบกวน (shielded enclosures) ช่วยลดความเสี่ยงจากการรบกวนลงได้ถึง 40% ในการติดตั้งแบบไม่มีเคสหุ้ม (unhoused deployments) (EMC Journal 2023)
พร้อมปรับแต่งระบบการมองเห็นแบบฝังตัว (Embedded Vision System) ของคุณด้วยกล้องระดับบอร์ดแบบเฉพาะเจาะจงหรือยัง?
กล้องระดับบอร์ด (Board Level Camera) คือหัวใจสำคัญของระบบการมองเห็นแบบฝังตัว (Embedded Vision Systems) ที่มีความน่าเชื่อถือ ขนาดกะทัดรัด และประสิทธิภาพสูง — ไม่มีโซลูชันสำเร็จรูปใดสามารถเทียบเคียงได้กับความสามารถในการปรับแต่งเฉพาะ การใช้พลังงานอย่างมีประสิทธิภาพ และความยืดหยุ่นในการรวมเข้ากับระบบที่มากกว่าการออกแบบกล้องระดับบอร์ดที่พัฒนาขึ้นเฉพาะสำหรับผู้ผลิตอุปกรณ์ดั้งเดิม (OEM) โดยการจัดสมดุลประสิทธิภาพของเซนเซอร์ โปรโตคอลอินเทอร์เฟซ การสนับสนุนซอฟต์แวร์ และรูปแบบทางกายภาพให้สอดคล้องกับความต้องการเฉพาะของแอปพลิเคชันของคุณ คุณจะสามารถเร่งระยะเวลาในการนำผลิตภัณฑ์ออกสู่ตลาด (Time-to-Market) ลดต้นทุนวัสดุ (BOM Costs) และรับประกันความน่าเชื่อถือที่สม่ำเสมอในระยะยาว แม้ในสภาพแวดล้อมแบบฝังตัวที่มีความต้องการสูงที่สุด

สำหรับโซลูชันกล้องระดับบอร์ดที่มีคุณภาพสำหรับอุตสาหกรรม ซึ่งออกแบบมาเฉพาะเพื่อการประยุกต์ใช้ด้านวิชันฝังตัว (embedded vision) ของผู้ผลิตอุปกรณ์ดั้งเดิม (OEM) ของคุณ หรือเพื่อสร้างระบบวิชันแบบบูรณาการอย่างสมบูรณ์พร้อมเลนส์ เครื่องให้แสง และเครื่องมือประมวลผลขอบ (edge processing tools) ที่เสริมประสิทธิภาพซึ่ง HIFLY ให้บริการ โปรดร่วมงานกับผู้ให้บริการที่มีพื้นฐานความเชี่ยวชาญลึกซึ้งด้านวิชันเครื่องจักรอุตสาหกรรมและประสบการณ์ในการปรับแต่งผลิตภัณฑ์ให้ตรงตามความต้องการของ OEM โดยประสบการณ์ 15 ปีของ HIFLY ครอบคลุมการออกแบบกล้องระดับบอร์ด การผลิตแบบกำหนดเองแบบเต็มรูปแบบสำหรับ OEM/ODM และการผสานรวมระบบวิชันฝังตัวแบบครบวงจร (end-to-end) — ซึ่งได้รับการรับรองมาตรฐาน ISO 9001:2015 สนับสนุนการปฏิบัติตามข้อบังคับระดับโลก และให้บริการวิศวกรออกแบบเฉพาะทาง (design-in engineering services) อย่างมุ่งมั่น ติดต่อเราในวันนี้เพื่อรับคำปรึกษาโดยไม่มีภาระผูกพัน สร้างต้นแบบแบบกำหนดเอง หรือออกแบบกล้องระดับบอร์ดที่เหมาะสมที่สุดสำหรับโครงการวิชันฝังตัวของคุณ





