

เคล็ดลับในการเลือกกล้องสแกนแบบไลน์ที่เหมาะสม
พื้นฐานของกล้องสแกนแบบไลน์: สถาปัตยกรรม หลักการ และข้อได้เปรียบสำคัญ
วิธีที่การถ่ายภาพแบบไลน์สแกนแตกต่างจากการถ่ายภาพแบบแอเรียสแกน—ช่วยกำจัดภาพเบลอจากความเคลื่อนไหวและทำให้สามารถบรรลุความละเอียดแนวตั้งแบบไม่จำกัด
กล้องสแกนแบบพื้นที่ (Area scan cameras) จับภาพสองมิติ (2D) ทั้งหมดพร้อมกันในครั้งเดียว ขณะที่กล้องสแกนแบบเส้น (Line scan cameras) ทำงานต่างออกไป โดยมีเพียงแถวเดียวของพิกเซลซึ่งสร้างภาพขึ้นทีละส่วนตามการเคลื่อนผ่านของวัตถุเข้าสู่ขอบเขตการมองเห็นของกล้อง ระบบจะประสานงานกับการเคลื่อนที่โดยใช้อุปกรณ์เช่น เอ็นโคเดอร์แบบหมุน (rotary encoders) หรือเอ็นโคเดอร์แบบเชิงเส้น (linear encoders) ทำให้ไม่เกิดภาพเบลอแม้ในขณะที่วัตถุเคลื่อนที่ด้วยความเร็วสูงมาก — บางครั้งสูงกว่า 10 เมตรต่อวินาที ปัจจัยที่สำคัญที่สุดในกรณีนี้คือ ความละเอียดแนวตั้งสามารถขยายได้เกือบไม่สิ้นสุด โดยความสูงของภาพที่ได้ขึ้นอยู่กับระยะทางที่วัตถุเคลื่อนผ่านกล้องเท่านั้น ไม่ได้จำกัดด้วยขนาดของเซนเซอร์เอง ด้วยเหตุนี้ เทคโนโลยีการสแกนแบบเส้นจึงโดดเด่นเป็นพิเศษในงานที่ต้องการความแม่นยำสูง เช่น การตรวจสอบชิ้นส่วนเซมิคอนดักเตอร์ระหว่างกระบวนการผลิต หรือการติดตามม้วนโลหะขนาดใหญ่ที่มีความกว้างถึง 3,000 มิลลิเมตร ขณะที่ระบบสแกนแบบพื้นที่แบบดั้งเดิมไม่สามารถจัดการสถานการณ์เหล่านี้ได้อย่างมีประสิทธิภาพ โดยหากพยายามใช้งาน จะต้องสร้างภาพขนาดใหญ่ที่ประกอบขึ้นจากหลายส่วน (stitched together images) หรือสูญเสียรายละเอียดสำคัญไปในระหว่างกระบวนการ
อธิบายส่วนประกอบหลัก: เซ็นเซอร์เชิงเส้น เครื่องยนต์อัตราการสแกนแบบไลน์ อินเทอร์เฟซเอนโค้เดอร์ และตรรกะการซิงโครไนซ์แบบเรียลไทม์
ส่วนประกอบที่พึ่งพาอาศัยกันทั้งสี่ส่วนนี้ทำให้เกิดความแม่นยำระดับนี้:
- เซนเซอร์เชิงเส้น โดยทั่วไปคืออาร์เรย์ CMOS หรือ CCD ที่มีพิกเซลใช้งานได้ 1–16k พิกเซล ซึ่งกำหนดความละเอียดในแนวราบและช่วงการตอบสนองทางสเปกตรัม
- เครื่องยนต์อัตราการสแกนแบบไลน์ ประมวลผลข้อมูลพิกเซลที่อัตรา 10–140 กิโลเฮิร์ตซ์ โดยปรับจังหวะให้สอดคล้องกับความเร็วของวัตถุอย่างไดนามิกเพื่อให้สอดคล้องกับความถี่ในการสุ่มตัวอย่าง
- อินเทอร์เฟซเอนโค้เดอร์ แปลงการเคลื่อนที่เชิงกลให้เป็นสัญญาณทริกเกอร์ที่แม่นยำ—บรรลุการซิงโครไนซ์ความเร็วที่แม่นยำ ±0.01% ผ่านการถอดรหัสแบบควอดราเจอร์ (quadrature decoding)
- ตรรกะการซิงโครไนซ์แบบเรียลไทม์ ชดเชยการสั่นสะเทือนที่ก่อให้เกิดการแย่ง (jitter) หรือการเปลี่ยนแปลงความเร็วชั่วคราว เพื่อรักษาการจัดตำแหน่งพิกเซลย่อย (sub-pixel registration) อย่างต่อเนื่องตลอดการสแกน
โดยรวมแล้ว องค์ประกอบเหล่านี้สนับสนุนการสร้างภาพที่ไม่มีการบิดเบือนบนพื้นผิวทรงกระบอก วัสดุที่เป็นเว็บแบบไม่มีที่สิ้นสุด (endless webs) และวัสดุที่มีความไม่เสถียรทางความร้อน—ซึ่งเป็นความสามารถที่สถาปัตยกรรมแบบแอเรีย (area-based architectures) ไม่สามารถให้ได้โดยพื้นฐาน
การจับคู่ความแม่นยำของอัตราการสแกนเส้น ความเร็วของการเคลื่อนที่ และความละเอียดเชิงพื้นที่
สมการหลัก: Δx = v / fline — และวิธีการประยุกต์ใช้เพื่อการสอบเทียบพิกเซลต่อมิลลิเมตร
การวัดค่าเชิงพื้นที่อย่างแม่นยำในการถ่ายภาพแบบไลน์สแกนนั้นขึ้นอยู่กับความสอดคล้องกันระหว่างความเร็วของวัตถุ (v) กับอัตราการจับภาพแบบไลน์ของกล้อง (fline) เป็นหลัก ซึ่งโดยพื้นฐานแล้วมีสูตรพื้นฐานดังนี้: ค่าเดลต้า x เท่ากับ v หารด้วย fline ซึ่งบ่งบอกถึงระยะทางจริงที่แต่ละพิกเซลแทนค่าไว้ ตัวอย่างเช่น หากเราตรวจสอบสายพานลำเลียงที่เคลื่อนที่ด้วยความเร็ว 500 มิลลิเมตรต่อวินาที และกล้องของเราตั้งค่าไว้ที่ 10 กิโลเฮิร์ตซ์ ผลการคำนวณจะได้ค่าความละเอียดเท่ากับประมาณ 0.05 มิลลิเมตรต่อพิกเซล ในการสอบเทียบระบบนี้ การวัดความเร็วอย่างเชื่อถือได้มีความสำคัญอย่างยิ่ง ผู้ใช้ส่วนใหญ่มักอาศัยเครื่องวัดความเร็วด้วยเลเซอร์แบบดอปเปลอร์ (laser Doppler velocimeters) สำหรับขั้นตอนนี้ จากนั้นจึงปรับค่าอัตราการจับภาพแบบไลน์ให้สอดคล้องกับค่าเดลต้า x ที่ต้องการอย่างแม่นยำ ทั้งนี้ ควรระมัดระวังความเบี่ยงเบนต่าง ๆ ด้วย เพราะหากค่าความเร็วเปลี่ยนแปลงเกินกว่า ±2% ความคลาดเคลื่อนจะเริ่มปรากฏขึ้นในงานประยุกต์ที่ต้องการความแม่นยำสูง เช่น การตรวจสอบความกว้างของลายวงจรบนแผงวงจรพิมพ์ (PCB traces)
การซิงโครไนซ์แบบใช้เอนโค้ดเดอร์: รับประกันความแม่นยำในการจัดตำแหน่งระดับย่อยพิกเซลในสภาพแวดล้อมที่มีการสั่นสะเทือนสูงหรือความเร็วแปรผัน
เมื่อเครื่องจักรสั่นสะเทือนหรือความเร็วของมันเปลี่ยนแปลงอย่างไม่คาดคิด จะก่อให้เกิดปัญหาด้านการจับเวลา ซึ่งส่งผลให้ภาพที่ได้มีความคมชัดลดลง และการวัดค่าซ้ำๆ มีความแม่นยำต่ำลง ด้วยการประสานงานตำแหน่งของเอนโค้เดอร์เข้ากับสัญญาณตอบกลับตำแหน่งจากระบบขับเคลื่อน เราสามารถควบคุมช่วงเวลาที่ถ่ายภาพได้อย่างแม่นยำ หมายความว่า แม้ความเร็วจะแปรผันสูงสุดถึง 15% ก็ยังสามารถรับประกันการจับภาพที่มีความแม่นยำระดับย่อยพิกเซล (sub-pixel level) ซึ่งมีความสำคัญอย่างยิ่งต่อการควบคุมคุณภาพ ตัวเลขก็บ่งชี้ชัดเจนเช่นกัน: เอนโค้เดอร์แบบหมุนสามารถวัดมุมได้แม่นยำถึง 0.001 องศา ในขณะที่เอนโค้เดอร์แบบเชิงเส้นสามารถตรวจจับตำแหน่งได้แม่นยำภายในเพียง 1 ไมโครเมตร ความสามารถเหล่านี้สร้างความแตกต่างอย่างมากในสภาพแวดล้อมอุตสาหกรรมที่ท้าทาย เช่น โรงหลอมเหล็ก ซึ่งทุกสิ่งทุกอย่างสั่นสะเทือนอย่างต่อเนื่อง หรือโรงงานสิ่งทอ ที่แรงตึงเปลี่ยนแปลงทุกขณะ ด้วยการประสานงานเอนโค้เดอร์อย่างเหมาะสม ระบบจะสามารถตรวจจับข้อบกพร่องที่แท้จริงได้ แทนที่จะทิ้งสินค้าที่ดีโดยไม่จำเป็น งานวิจัยแสดงให้เห็นว่าวิธีการนี้ช่วยลดจำนวนการปฏิเสธสินค้าผิดพลาดลงประมาณ 40% เมื่อเทียบกับวิธีการแบบดั้งเดิมที่ทำงานแบบไม่มีจุดกระตุ้น (free-running) ใดๆ

เกณฑ์การเลือกที่ขับเคลื่อนด้วยการใช้งานสำหรับกรณีการใช้งานอุตสาหกรรมทั่วไป
การตรวจสอบผ่านเว็บ: การจัดการความแปรผันของแรงตึง การต่อเนื่องของการเย็บ และการระบุตำแหน่งข้อบกพร่องแบบเรียลไทม์
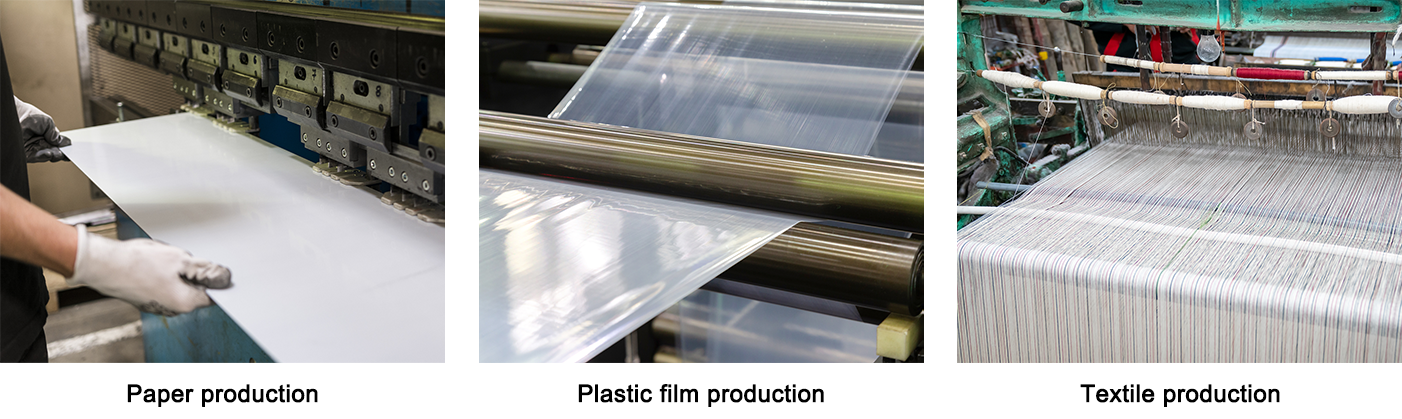
เมื่อทำงานกับวัสดุแบบม้วนต่อเนื่อง เช่น กระดาษ ฟิล์มพลาสติก ฟอยล์โลหะ หรือผ้าม้วน การเลือกกล้องสแกนแบบไลน์ (line scan camera) ที่เหมาะสมจะขึ้นอยู่กับปัจจัยหลักสามประการ ซึ่งมีความสำคัญมากที่สุดในสายการผลิต ประการแรก ความท้าทายคือความแปรผันของความเร็วที่เกิดจากการเปลี่ยนแปลงแรงตึงตลอดกระบวนการ เพื่อรับมือกับปัญหานี้ ระบบจำเป็นต้องใช้คอนโทรลเลอร์แบบปรับตัวได้ที่ทำงานด้วยความถี่ไม่น้อยกว่า 20 กิโลเฮิร์ตซ์ ควบคู่ไปกับวงจรตอบสนองจากเอนโคเดอร์ (encoder feedback loops) เพื่อให้ภาพที่ได้คงความสอดคล้องกันแบบพิกเซลต่อพิกเซลทั่วทั้งความกว้างของวัสดุ ประการที่สอง การนำภาพแต่ละบรรทัดมาต่อกันอย่างต่อเนื่องโดยไม่มีช่องว่างระหว่างบรรทัด จำเป็นต้องมีการทับซ้อนกันของอาร์เรย์พิกเซลอย่างแม่นยำ ผู้ผลิตมักมุ่งหมายให้ระบบมีความแม่นยำในการซิงโครไนซ์ดีกว่าหนึ่งไมโครวินาที เพื่อรักษาความต่อเนื่องของผลการตรวจสอบขั้นสุดท้าย ประการที่สาม การตรวจจับข้อบกพร่องขณะเกิดขึ้นจริงนั้นขึ้นอยู่กับพลังการประมวลผลบนตัวเครื่องเป็นอย่างมาก ปัจจุบัน ระบบสมัยใหม่หลายระบบใช้ชิป FPGA เพื่อเร่งงานวิเคราะห์ภาพพื้นฐาน เช่น การตรวจจับค่าเกณฑ์ (threshold detection) ทำให้สามารถระบุปัญหาได้ภายในเวลาเพียงห้ามิลลิวินาทีก่อนที่ผลิตภัณฑ์จะถูกตัดสินว่าไม่ผ่านมาตรฐาน งานวิจัยล่าสุดในปี ค.ศ. 2023 แสดงให้เห็นว่า การเปลี่ยนจากเทคโนโลยีกล้องสแกนแบบแอเรีย (area scan) ไปเป็นเทคโนโลยีกล้องสแกนแบบไลน์ ช่วยเพิ่มอัตราการตรวจจับข้อบกพร่องได้เกือบ 92% เมื่อทำงานที่ความเร็วสายการผลิตแปดเมตรต่อวินาที ซึ่งเป็นเหตุผลสำคัญที่ผู้ผลิตหลายรายกำลังเปลี่ยนมาใช้เทคโนโลยีนี้มากขึ้นในปัจจุบัน
การสแกนชิ้นส่วนทรงกระบอก: การแมปความละเอียดเชิงมุม การจัดแนวเอนโค้เดอร์แบบหมุน และข้อควรระวังเกี่ยวกับการบิดเบือนของสนามมอง (FOV)
เมื่อจัดการกับชิ้นส่วนที่หมุน เช่น ขวด ตลับลูกปืน หรือเพลาของรถยนต์ ความละเอียดเชิงมุม (angular resolution) มีบทบาทสำคัญในการเลือกเซ็นเซอร์ที่เหมาะสมสำหรับงานนั้นๆ สมการพื้นฐานมีลักษณะดังนี้: N เท่ากับ ค่าพาย คูณด้วยเส้นผ่านศูนย์กลาง หารด้วย RPM คูณด้วย 60 คูณด้วยความละเอียดเชิงพื้นที่ที่ต้องการ การคำนวณค่าตัวเลขเหล่านี้ให้ถูกต้องมีความสำคัญอย่างยิ่ง เพราะหากเอนโค้เดอร์แบบหมุนติดตั้งไม่ตรงแนว จะก่อให้เกิดปัญหาได้ ซึ่งโดยเฉลี่ยแล้ว ปัญหานี้เกิดขึ้นประมาณครึ่งหนึ่งของกรณีทั้งหมด และนำไปสู่การบิดเบือนตามแนวรัศมี (radial distortion) มากกว่า 15% จึงเป็นเหตุผลที่ช่างเทคนิคจำนวนมากตรวจสอบการติดตั้งระบบของตนก่อนเป็นอันดับแรกโดยใช้สัญญาณควอดราเจอร์ (quadrature signals) อีกประเด็นหนึ่งที่ควรระวังคือ การบิดเบือนของภาพจากแสง (optical distortion) ซึ่งเลนส์ทั่วไปมักทำให้ภาพบิดเบี้ยวบริเวณขอบโค้ง จนเกิดปรากฏการณ์ที่เรียกว่า 'การบิดเบือนแบบถัง' (barrel distortion) ด้วยเหตุนี้ บางแอปพลิเคชันจึงเปลี่ยนมาใช้เลนส์เทเลเซนตริก (telecentric optics) แทน เนื่องจากเลนส์ชนิดนี้สามารถควบคุมความคลาดเคลื่อนในการวัดให้อยู่ต่ำกว่า 0.1% ตลอดทั้งพื้นที่การมองเห็นทั้งหมด สำหรับการตรวจสอบเพลาในอุตสาหกรรมยานยนต์ ซึ่งปัญหาเงาสะท้อน (glare) เป็นอุปสรรคสำคัญ การเปลี่ยนจากเซ็นเซอร์แบบ 8-bit ไปเป็นแบบ 12-bit จะส่งผลแตกต่างอย่างมาก โดยร้านซ่อมส่วนใหญ่รายงานว่า จำนวนการตรวจจับผิดพลาดลดลงประมาณ 70% หลังการอัปเกรด แม้ว่าผลลัพธ์ที่ได้อาจแปรผันไปตามเงื่อนไขเฉพาะของแต่ละสถานการณ์
กล้องสแกนเส้น VS กล้องสแกนพื้นที่: เมื่อเลือกแต่ละตัวเพื่อ ROI ที่ดีที่สุด
สถานการณ์สําคัญห้าครั้ง ที่กล้องสแกนเส้นทางให้ผลงานและประสิทธิภาพในเรื่องค่าใช้จ่ายที่ไม่แพ้ใคร
ขณะที่กล้องสแกนพื้นที่ยังคงเป็นสิ่งที่ดีที่สุดสําหรับวัตถุที่แยกแยก, เสถียร, หรือความเร็วต่ํา, เทคโนโลยีสแกนเส้นส่งผลงานที่ดีกว่าและ ROI ที่แข็งแกร่งกว่าใน 5 สัมพันธ์อุตสาหกรรมขนาดสูง:
- การตรวจสอบเว็บไซต์ความเร็วสูง (กระดาษ, โฟลย, ฟิล์ม) ที่ความมืดของการเคลื่อนไหวทําให้ความแม่นยําในการสแกนพื้นที่ลดลง; การสแกนเส้นจับสไลส์ 1 มิติที่ไม่มีการบิดเบือนที่ > 70 kHz ทําให้สามารถถ่ายภาพขนาดกิโลเมตรได้
- การติดตามแผ่นโลหะ ในระหว่างการม้วนร้อน เมื่อการเคลื่อนไหวทางความร้อนและการสั่นสะเทือนโครงสร้างต้องการการรับข้อมูลที่สอดคล้องกับเครื่องรหัส เพื่อรักษาการบันทึก sub-pixel
- การผลิตผ้า , โดยการควบคุมความยืดหยุ่นของผ้าและความแตกต่างของความแน่นผ่านการปรับขนาดพิกเซลในเวลาจริงหลีกเลี่ยงสิ่งประดิษฐ์ที่เกี่ยวข้องกับการตั้งค่าสแกนพื้นที่หลายกล้อง
- การตรวจสอบ 360 ° ของส่วนกลมหมุน , โดยการแมปความละเอียดเชิงมุมช่วยให้ตรวจจับข้อบกพร่องระดับไมครอนได้ที่ความเร็วสูงกว่า 2,000 รอบต่อนาที (RPM)
- การสแกนพื้นที่ขนาดใหญ่ (แผงโซลาร์เซลล์ วัสดุคอมโพสิตสำหรับอุตสาหกรรมการบินและอวกาศ) ซึ่งระบบสแกนแบบไลน์ช่วยกำจัดความจำเป็นในการจัดแนวและปรับค่าเทียบเคียงกล้องหลายตัวที่มีต้นทุนสูง
ในแอปพลิเคชันเหล่านี้ ระบบสแกนแบบไลน์ช่วยลดต้นทุนฮาร์ดแวร์และการผสานรวมลง 30–60% ขณะเดียวกันยังลดจำนวนการปฏิเสธผลลัพธ์ที่ผิดพลาด—ซึ่งมักเกิดจากอาร์ติแฟกต์จากการเคลื่อนไหวในระบบสแกนแบบพื้นที่—ลงประมาณ 15% ความสามารถในการปรับขยายได้และความสามารถของสถาปัตยกรรมเซนเซอร์เพียงตัวเดียวทำให้เกิดผลตอบแทนจากการลงทุน (ROI) ภายใน 8–12 เดือนในสภาพแวดล้อมการผลิตที่มีอัตราการผลิตสูง

พร้อมที่จะเลือกกล้องสแกนแบบไลน์ที่เหมาะสมสำหรับการใช้งานอุตสาหกรรมของคุณหรือยัง?
กล้องสแกนแบบไลน์ที่เหมาะสมคือรากฐานของการตรวจสอบอุตสาหกรรมที่เชื่อถือได้และมีความเร็วสูง—ไม่มีอัลกอริธึมหรือซอฟต์แวร์ใดสามารถชดเชยข้อผิดพลาดจากการเลือกกล้องที่ไม่สอดคล้องกับอัตราความเร็วของสายการผลิต ความต้องการความละเอียด หรือสภาพแวดล้อมการผลิตของคุณได้ ด้วยการจับคู่อัตราการสแกนแบบไลน์ ความละเอียดของเซนเซอร์ การซิงโครไนซ์กับเอนโค้เดอร์ และการออกแบบทางออปติกให้สอดคล้องกับแอปพลิเคชันเฉพาะของคุณ คุณจะ ปลดล็อกการตรวจสอบที่ไร้ช่องว่าง แม่นยำถึงระดับไมครอน ลดการปฏิเสธผลิตภัณฑ์ผิดพลาด และสร้างผลตอบแทนจากการลงทุน (ROI) ที่วัดค่าได้สำหรับกระบวนการผลิตของคุณ
สำหรับโซลูชันกล้องสแกนแบบไลน์ (line scan camera) ระดับอุตสาหกรรมที่ออกแบบมาเฉพาะสำหรับการตรวจสอบพื้นผิวแบบต่อเนื่อง (web inspection) การสแกนทรงกระบอก (cylindrical scanning) หรือการถ่ายภาพรูปแบบขนาดใหญ่ (large-format imaging) หรือเพื่อสร้างระบบการมองเห็นด้วยเครื่องจักร (machine vision system) แบบบูรณาการอย่างสมบูรณ์ ซึ่งประกอบด้วยอุปกรณ์เสริม เช่น แหล่งกำเนิดแสง เลนส์ และเครื่องมือประสานงานกับเอนโคเดอร์ (encoder synchronization tools) ตามที่ HIFLY เสนอ โปรดร่วมมือกับผู้ให้บริการที่มีความเชี่ยวชาญลึกซึ้งด้านระบบการมองเห็นด้วยเครื่องจักรในภาคอุตสาหกรรม HIFLY's ประสบการณ์ 15 ปี ครอบคลุมกล้องสแกนแบบไลน์ความเร็วสูงที่รองรับมาตรฐาน 10 GigE ความละเอียด 8K ระบบการถ่ายภาพหลายช่วงคลื่น (multi-spectral imaging systems) และโซลูชันการตรวจสอบอุตสาหกรรมแบบครบวงจร — ซึ่งได้รับการรับรองตามมาตรฐาน ISO 9001:2015 มีสิทธิบัตรการประดิษฐ์กว่า 30 ฉบับ และให้การสนับสนุนลูกค้ามากกว่า 2,500 รายในกว่า 30 ประเทศ ติดต่อเราได้ทันทีวันนี้เพื่อรับคำปรึกษาโดยไม่มีค่าใช้จ่าย เพื่อเลือกกล้องสแกนแบบไลน์ที่เหมาะสมที่สุดสำหรับการดำเนินงานของคุณ





