

ฟังก์ชันหลักของเฟรมแกร็บเบอร์สำหรับกล้องอุตสาหกรรม (6 ประเด็นสำคัญ)
การ์ดจับภาพทำหน้าที่เป็นศูนย์กลางสัญญาณและช่องทางการรับส่งข้อมูลความเร็วสูงในระบบวิชั่นของเครื่องจักร โดยเชื่อมต่อกล้องอุตสาหกรรมเข้ากับคอมพิวเตอร์โฮสต์ เพื่อให้สามารถแปลงสัญญาณ ถ่ายโอนข้อมูลด้วยความเร็วสูง ควบคุมจังหวะเวลาอย่างแม่นยำ ประสานงานการทำงานของกล้องหลายตัวพร้อมกัน ป้องกันสัญญาณรบกวน และประมวลผลข้อมูลเบื้องต้นด้วยฮาร์ดแวร์
1. การแปลงสัญญาณและการปรับตัวให้สอดคล้องกับโปรโตคอล (หลักสำคัญ)
กล้องแบบอะนาล็อก: ดำเนินการแปลงสัญญาณจากอะนาล็อกเป็นดิจิทัล (ADC) เพื่อเปลี่ยนสัญญาณวิดีโอแบบอะนาล็อกให้เป็นสตรีมพิกเซลแบบดิจิทัล
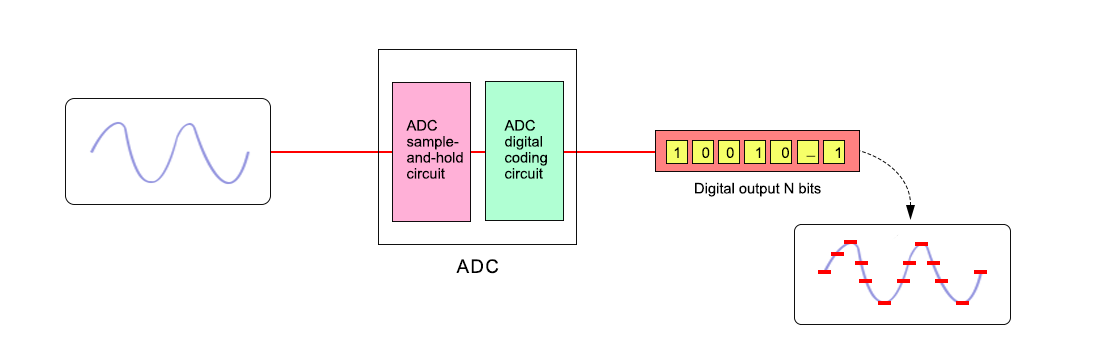
กล้องแบบดิจิทัล: แยกวิเคราะห์โปรโตคอลการสื่อสารอุตสาหกรรม เช่น Camera Link, CoaXPress (CXP) และ GigE Vision ดำเนินการแปลงอินเทอร์เฟซทางกายภาพและโปรโตคอล และส่งออกข้อมูลภาพในรูปแบบที่คอมพิวเตอร์สามารถอ่านได้ (เช่น RAW → RGB/YUV)
2. การถ่ายโอนข้อมูลด้วยความเร็วสูงและเสถียร พร้อมป้องกันการสูญเสียเฟรม
ให้อินเทอร์เฟซบัส PCIe ความเร็วสูง (เช่น PCIe x4/x8/x16) เพื่อรองรับความต้องการแบนด์วิดท์ของกล้องที่มีความละเอียดสูงและอัตราเฟรมสูง (12.5 Gbps ต่อช่อง CXP-12)
ติดตั้งแคชความเร็วสูงบนบอร์ด (DDR) เพื่อรองรับความไม่สอดคล้องกันของอัตราการถ่ายโอนข้อมูลระหว่างกล้องกับโฮสต์ ซึ่งช่วยป้องกันการสูญเสียเฟรมและการฉีกขาดของภาพได้อย่างมีประสิทธิภาพ
ใช้เทคโนโลยีปรับสภาพและแยกสัญญาณระดับอุตสาหกรรม เพื่อต้านทานการรบกวนจากคลื่นแม่เหล็กไฟฟ้า (EMI: Electromagnetic Interference) ทำให้มั่นใจได้ถึงความเสถียรของการส่งข้อมูลในสภาพแวดล้อมอุตสาหกรรมที่รุนแรง
3. การกระตุ้นด้วยจังหวะเวลาที่แม่นยำ (ระดับฮาร์ดแวร์)
รองรับการกระตุ้นจากภายนอก (เช่น เซ็นเซอร์โฟโตอิเล็กทริก หรือเอนโค้เดอร์) การกระตุ้นผ่านซอฟต์แวร์ และการกระตุ้นตามเวลาที่กำหนด ซึ่งมีความหน่วงในการตอบสนองระดับไมโครวินาที
ควบคุมจังหวะเวลาในการเปิดรับแสงและอัตราเฟรมอย่างแม่นยำ เหมาะสำหรับการตรวจจับการเคลื่อนไหวความเร็วสูง (เช่น การจัดเรียงสินค้าบนสายการผลิต หรือการวัดชิ้นส่วนเซมิคอนดักเตอร์) ทำให้สามารถจับภาพได้อย่างแม่นยำและซ้ำได้สูง
4. การซิงค์และประสานงานระหว่างกล้องหลายตัว
ส่งสัญญาณซิงค์แบบรวมศูนย์ (เช่น PTP (Precision Time Protocol) หรือ GenLock) เพื่อให้กล้องหลายตัวเปิดรับแสงพร้อมกันอย่างสมบูรณ์ ซึ่งช่วยรับประกันความสอดคล้องของข้อมูลสำหรับการมองเห็นแบบสเตอริโอและการตรวจสอบแบบ 360°
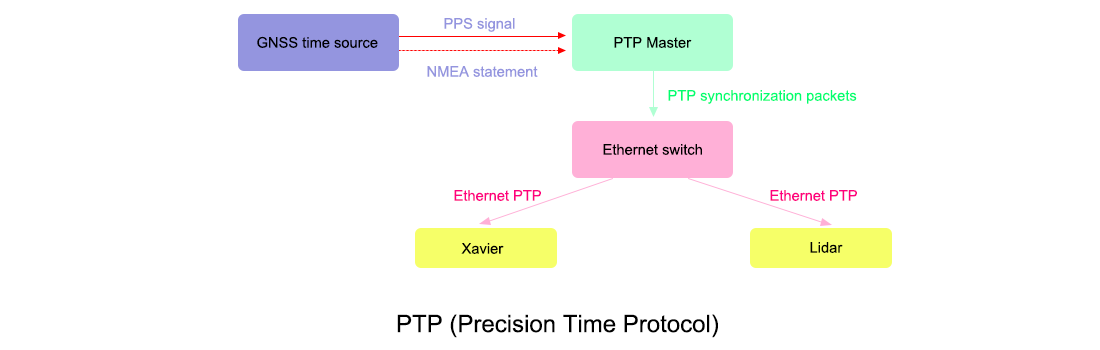
รองรับการรับข้อมูลแบบพร้อมกันหลายช่องทาง เพื่อตอบสนองความต้องการในการตรวจสอบแบบขนานจากหลายมุมมอง/หลายสถานี
5. การประมวลผลล่วงหน้าด้วยฮาร์ดแวร์ (รุ่นระดับสูง)
ผสานรวมชิป FPGA/ASIC เพื่อดำเนินการประมวลผลด้วยฮาร์ดแวร์แบบเร่งความเร็ว ซึ่งรวมถึงการลดสัญญาณรบกวน การปรับแก้สี การตัดภาพบริเวณที่สนใจ (ROI: Region of Interest) และการแทรกค่าสีแบบเบเยอร์ (Bayer interpolation)
ลดภาระงานของ CPU/GPU บนโฮสต์ และเพิ่มประสิทธิภาพการทำงานแบบเรียลไทม์และอัตราการผ่านข้อมูลของระบบ (เช่น การตรวจสอบ AOI ความเร็วสูง)
6. การผสานรวมระบบและการควบคุม
จัดเตรียมอินเทอร์เฟซดิจิทัล I/O เพื่อการผสานรวมอย่างไร้รอยต่อกับ PLC และตัวควบคุมการเคลื่อนที่ ทำให้เกิดกระบวนการทำงานแบบปิดวงจร (closed-loop) ได้แก่ "การรับภาพ – การวิเคราะห์ – การควบคุม"
สอดคล้องตามมาตรฐาน GenICam ซึ่งรับประกันความเข้ากันได้กับกล้องจากผู้ผลิตต่าง ๆ และช่วยให้การผสานรวมระบบเป็นไปอย่างง่ายดาย
หมายเหตุเพิ่มเติม: เมื่อจำเป็นต้องใช้ Frame Grabber
สำหรับกล้องความเร็วสูง/ความละเอียดสูง (เช่น แบนด์วิดท์ >10 Gbps อัตราเฟรม >1000 fps) ซึ่งอินเทอร์เฟซ Ethernet/USB มาตรฐานไม่สามารถรองรับได้
เมื่อต้องการการกระตุ้นและการซิงโครไนซ์ในระดับไมโครวินาที (เช่น การตรวจสอบชิ้นส่วนเซมิคอนดักเตอร์ การนำทางหุ่นยนต์)
สำหรับระบบกล้องร่วมมือแบบหลายตัว (เช่น การมองเห็นแบบสเตอริโอ การตรวจสอบแบบขนานหลายสถานี)
ในสภาพแวดล้อมอุตสาหกรรมที่มีสัญญาณรบกวนสูง ซึ่งต้องการการแยกสัญญาณด้วยฮาร์ดแวร์เพื่อให้การทำงานมีความเสถียร





