

โหมดการจับภาพของกล้องอุตสาหกรรม: การทริกเกอร์ การซิงโครไนซ์ และการถ่ายต่อเนื่อง
ในสายการผลิตที่ใช้ระบบอัตโนมัติทางอุตสาหกรรม มักจะเห็นเครื่องจักรทำงานโดยมีเสียงคลิกขณะถ่ายภาพ—นั่นคือกล้องอุตสาหกรรมกำลังทำงานอยู่ ต่างจากกล้องสมาร์ทโฟนทั่วไป กล้องเหล่านี้ให้ความสำคัญกับจังหวะเวลา การควบคุมรอบ และแม้แต่ "การทำงานร่วมกันอย่างไร้รอยต่อ"
วันนี้เราจะมาสำรวจกันว่า กล้องอุตสาหกรรมถ่ายภาพจริงๆ อย่างไร โหมดการถ่ายภาพที่พบบ่อยมีอะไรบ้าง และควรใช้โหมดใดเมื่อใด
ⅰ. กล้องอุตสาหกรรมถ่ายภาพอย่างไร? สี่วิธีที่นิยมใช้
"การถ่ายภาพ" สำหรับกล้องอุตสาหกรรม หมายถึงการรับภาพ โดยกระบวนการนี้สามารถทำงานได้หลายโหมด:
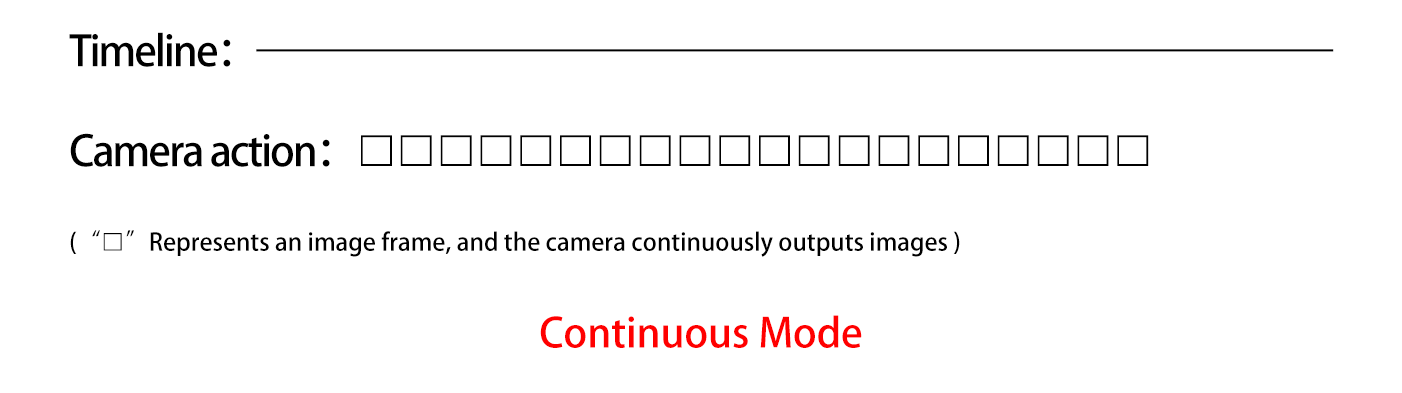
1. โหมดต่อเนื่อง: กล้องทำงานแบบ "สตรีมสด" เสมอ
(1) ไม่จำเป็นต้องใช้เงื่อนไขทริกเกอร์; กล้องจะเปิดรับแสงและถ่ายภาพต่อเนื่องด้วยตนเอง
(2) กระแสภาพไหลต่อเนื่องไม่หยุดเหมือนน้ำตก เหมาะสำหรับการตรวจสอบอย่างต่อเนื่อง
(3) เหมาะสำหรับ: การเฝ้าระวังรักษาความปลอดภัย, การตรวจสอบบนสายพานลำเลียงที่มีจังหวะคงที่ ฯลฯ
(4) ข้อดี: เรียบง่ายและสะดวก ข้อเสีย: สร้างภาพจำนวนมากแต่ขาดความแม่นยำ; ไม่สามารถควบคุมช่วงเวลาการถ่ายภาพที่แน่นอนได้
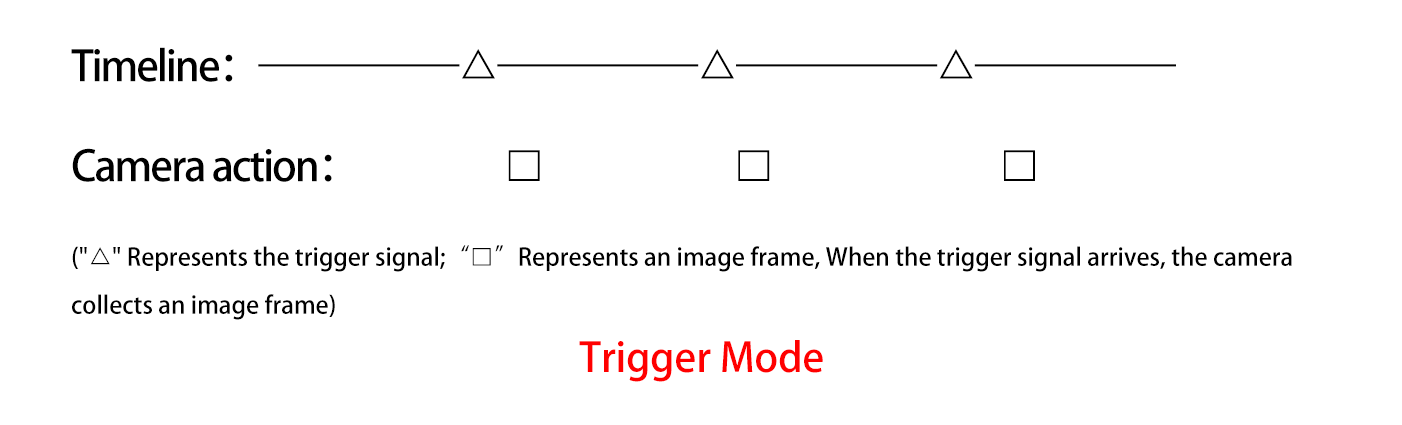
2. โหมดทริกเกอร์: กล้องจะถ่ายภาพเฉพาะเมื่อมีคนพูดว่า "Capture!"
(1) กล้องจะถ่ายภาพก็ต่อเมื่อได้รับคำสั่ง "capture command"
(2) คำสั่งนี้สามารถมาจากซอฟต์แวร์ (ส่งโดยคอมพิวเตอร์) หรือฮาร์ดแวร์ (เช่น สัญญาณไฟฟ้าจาก PLC หรือเซ็นเซอร์)
ทริกเกอร์แบบซอฟต์แวร์: คอมพิวเตอร์หลักควบคุมกล้องผ่านโค้ด เช่น การเรียกใช้ TriggerSoftware() เพื่อถ่ายภาพเพียงหนึ่งภาพ
ทริกเกอร์แบบฮาร์ดแวร์: อุปกรณ์ภายนอกส่งสัญญาณไฟฟ้า (เช่น สัญญาณขาขึ้นหรือระดับสูง) และกล้องจะตอบสนองทันที
(3) เหมาะอย่างยิ่งสำหรับ: การถ่ายภาพความเร็วสูง การประสานงานกับแขนหุ่นยนต์ การรับภาพในช่วงเวลาที่แม่นยำ
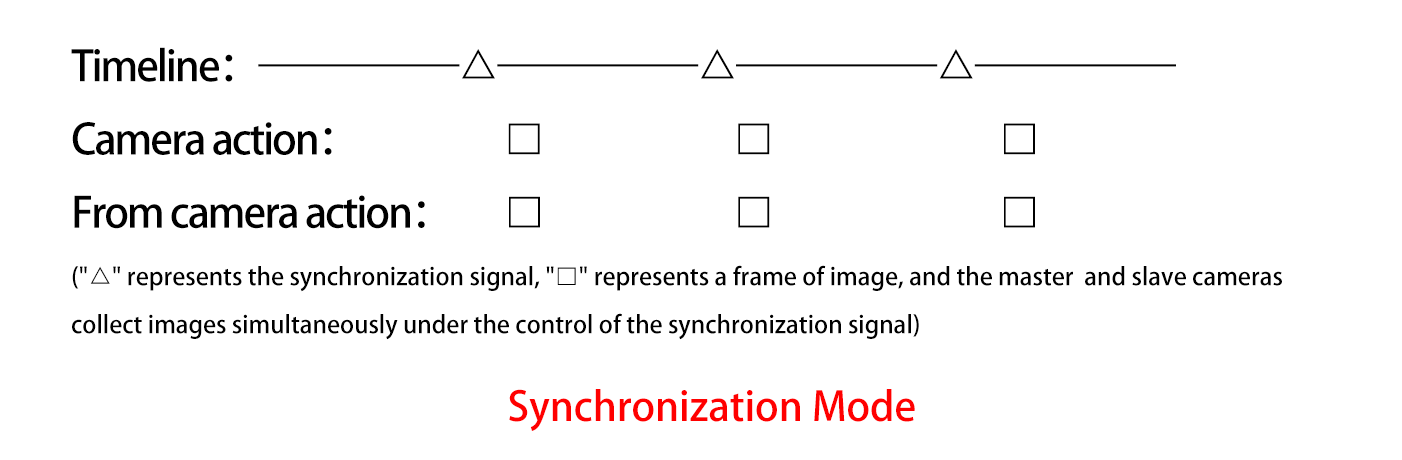
3. โหมดซิงโครไนซ์: กล้องหลายตัวถ่ายภาพพร้อมกันอย่างสมบูรณ์
(1) เหมือนกับการถ่ายภาพกลุ่ม กล้องหลายตัวได้รับสัญญาณที่รวมศูนย์ จากนั้นจึงเปิดรับแสงและจับภาพพร้อมกัน
(2) ทำให้มั่นใจได้ว่าภาพจากมุมต่างๆ จะถูกจับภาพในช่วงเวลาเดียวกันอย่างแม่นยำ โดยไม่มีความเบี่ยงเบนของเวลา
(3) เหมาะสำหรับ: การมองเห็นแบบสเตอริโอ ระบบการมองเห็นด้วยเครื่องจักรที่ใช้กล้องหลายตัว เป็นต้น
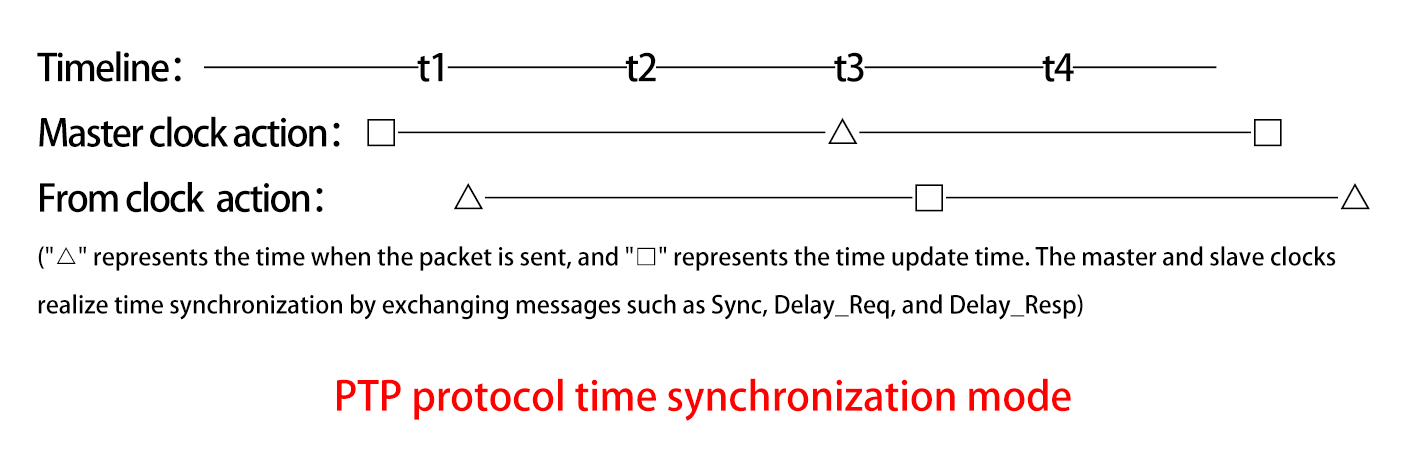
4. โหมดซิงค์โครไนซ์ตามเวลา: การซิงค์โครไนซ์ด้วย "นาฬิกา"
(1) รูปแบบขั้นสูงของการซิงค์โครไนซ์ ไม่เพียงแต่กล้องจะจับภาพพร้อมกัน แต่ยังบันทึก "เวลาที่แม่นยำ" ลงไปด้วย
(2) ใช้ระบบนาฬิกา GPS หรือ PTP (Precision Time Protocol) เพื่อกำหนดเวลาที่แน่นอนให้กับภาพทุกภาพ
(3) เหมาะสำหรับ: การประยุกต์ใช้งานขั้นสูงที่ต้องการ "การซิงค์โครไนซ์ตามเวลาทั่วโลก" เช่น การตรวจสอบรางรถไฟ ระบบกล้องระยะไกล เป็นต้น
iI. รองหัวหน้า สัญญาณทริกเกอร์มาจากไหน?
พูดอย่างง่าย ๆ สัญญาณทริกเกอร์บอกกล้องว่า "ถึงเวลาถ่ายภาพแล้ว!"
(1) ทริกเกอร์แบบซอฟต์แวร์
• มาจากคำสั่งที่ออกโดยคอมพิวเตอร์/โฮสต์
• ข้อดี: ใช้งานสะดวก เหมาะสำหรับการแก้ไขข้อผิดพลาดอย่างยืดหยุ่น
• ข้อเสีย: โดยทั่วไปมีเวลาตอบสนองช้ากว่าฮาร์ดแวร์ทริกเกอร์ โดยมีความล่าช้าประมาณ 1–5 มิลลิวินาที
(2) ทริกเกอร์แบบฮาร์ดแวร์
• มาจากอุปกรณ์ภายนอก เช่น PLC, เซ็นเซอร์, สวิตช์ หรือพอร์ต I/O
• ข้อดี: ความเร็วสูง เสถียรภาพดี ความล่าช้าสามารถอยู่ในระดับไมโครวินาที เหมาะสำหรับการใช้งานที่ต้องการความเร็วสูง
• ข้อเสีย: ต้องเดินสายไฟมากกว่า และอาจซับซ้อนในการติดตั้ง
ⅲ. ทริกเกอร์ "แอคชัน" มีรูปแบบต่าง ๆ อย่างไรบ้าง
สัญญาณไม่ใช่เพียงแค่คำว่า "จับภาพ" แต่มาในรูปแบบของการเปลี่ยนแปลงแรงดันไฟฟ้า กล้องอุตสาหกรรมสามารถเข้าใจประเภทต่อไปนี้:
|
โหมดการก่อ |
ความหมาย |
|
Rising Edge |
แรงดันไฟฟ้ากระโดดจากต่ำไปสูง (เช่น จาก 0V ไปเป็น 24V) |
|
ขอบตก |
แรงดันไฟฟ้าเปลี่ยนจากสูงไปต่ำ |
|
ทั้งสองขอบ |
ถูกกระตุ้นโดยขอบขึ้นและขอบลงทั้งสองอย่าง |
|
ระดับสูง |
แรงดันไฟฟ้าคงที่อยู่ในระดับสูงอย่างต่อเนื่อง |
|
ระดับต่ำ |
แรงดันไฟฟ้าคงที่อยู่ในระดับต่ำอย่างต่อเนื่อง |
ประการที่สี่ สองโหมดการทริกเกอร์: แบบขอบ (Edge) กับแบบระดับ (Level) - ต่างกันอย่างไร?
|
โหมด |
วิธีการเข้าใจ |
สถานการณ์ที่เหมาะสม |
|
การทริกเกอร์แบบเอจ |
กล้องจะจับภาพหนึ่งครั้งเมื่อสัญญาณเปลี่ยนแปลง (เอจ) จากนั้นจะเพิกเฉยต่อสถานะของสัญญาณ |
การจับภาพแบบเฟรมเดียว การถ่ายภาพที่มีเสถียรภาพ หลีกเลี่ยงการทริกเกอร์ซ้ำโดยไม่ได้ตั้งใจ |
|
การทริกเกอร์แบบเลเวล |
กล้องจะจับภาพอย่างต่อเนื่องตราบเท่าที่สัญญาณยังคงทำงานอยู่ (เลเวล) |
การจับภาพต่อเนื่องอย่างรวดเร็ว เช่น สายการผลิตความเร็วสูง |
ⅴ. โหมดใดเหมาะสมกว่ากันสำหรับสถานการณ์การใช้งานที่แตกต่างกัน?
|
สถานการณ์ |
โหมดที่แนะนำ |
เหตุผล |
|
ระบบความปลอดภัย การตรวจสอบทั่วไป |
โหมดต่อเนื่อง |
ใช้แรงงานต่ำ การดูภาพแบบเรียลไทม์ |
|
การดีบักในห้องปฏิบัติการ การจับภาพแบบบางครั้งคราว |
เครื่องกดโปรแกรม |
ควบคุมง่าย ไม่ต้องเดินสายไฟ |
|
การตรวจสอบสายการผลิตความเร็วสูง |
เครื่องกระตุ้นฮาร์ดแวร์ |
ความแม่นยำสูง ประสิทธิภาพมั่นคง |
|
การถ่ายภาพร่วมมุมมองหลายมุม |
การซิงค์แบบพร้อมกันหรือซิงค์เวลา |
การจับภาพพร้อมกัน โดยไม่มีข้อผิดพลาด |
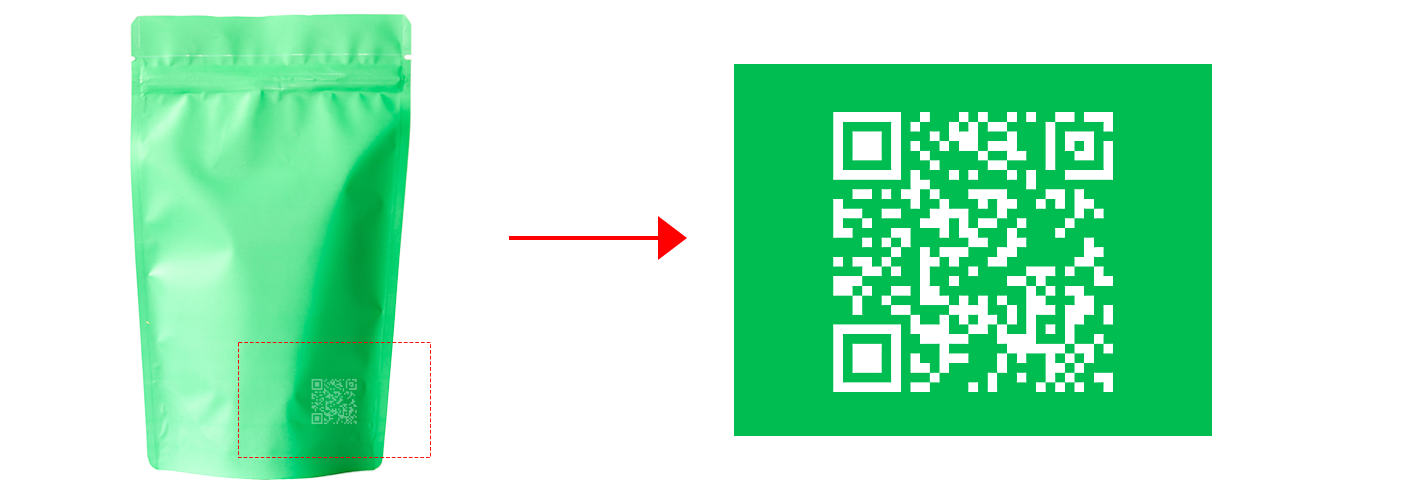
1. กลยุทธ์สีที่อยู่ติดกัน
ใช้สีของแสงที่ใกล้เคียงกับวัตถุเป้าหมาย (เช่น แสงสีเขียวสำหรับชิ้นส่วนสีเขียว) สิ่งนี้จะทำให้วัตถุเป้าหมายสว่างขึ้นในภาพ และ "ทำให้" พื้นหลังที่รบกวนจางลง—ตัวอย่างเช่น ลวดลายสีเขียวบนถุงบรรจุภัณฑ์สีเขียวจะดูจางลงภายใต้แสงสีเขียว จึงไม่รบกวนการอ่านรหัส QR สีขาว .
2. กลยุทธ์สีตรงข้าม
ใช้สีของแสงที่อยู่ตรงข้ามกับวัตถุเป้าหมายบนวงล้อสี (เช่น สีแดงกับสีเขียว สีน้ำเงินกับสีเหลือง) สิ่งนี้จะสร้างความต่างของความสว่างอย่างชัดเจน—ตัวอย่างเช่น ตัวหนังสือสีขาวบนพื้นหลังสีเขียวจะสว่างขึ้นภายใต้แสงสีแดง ในขณะที่พื้นหลังมืดลง ซึ่งช่วยเพิ่มอัตราความสำเร็จในการตรวจจับอย่างมาก
ⅵ. สรุป: โหมดการจับภาพที่ซับซ้อนที่สุดไม่จำเป็นต้องดีที่สุด—สิ่งที่เหมาะสมคือสิ่งที่ถูกต้อง!
• ต้องการครอบคลุมทั้งหมด เวลาไม่ใช่ปัจจัยสำคัญ? ใช้โหมดต่อเนื่อง
• ต้องการควบคุมช่วงเวลาอย่างแม่นยำ ต้องการการดำเนินการที่แม่นยำ? ใช้โหมดทริกเกอร์
• กล้องหลายตัวทำงานร่วมกัน? พิจารณาใช้โหมดการซิงค์หรือโหมดซิงค์เวลา
• สำหรับการทดลองหรือการดีบัก? การทริกเกอร์ด้วยซอฟต์แวร์มักเพียงพอ
• สำหรับสายการผลิตความเร็วสูง? การทริกเกอร์ด้วยฮาร์ดแวร์มีความน่าเชื่อถือมากกว่า





