

การตรวจจับเส้นขอบของเครื่องจักร
ในยุคของอุตสาหกรรม 4.0 และระบบอัตโนมัตอัจฉริยะ Machine Vision ได้กลายเป็นเทคโนโลยีหลักที่ทำให้เครื่องจักรสามารถ "มองเห็น" และตีความข้อมูลภาพด้วยความแม่นยำที่มักจะเหนือกว่าศักยภาพของมนุษย์ ในบรรดาฟังก์ชันหลักต่าง ๆ การตรวจจับลักษณะ มีความสำคัญอย่างยิ่ง: มันช่วยแยกลักษณะขอบของวัตถุออกจากภาพดิจิทัล ซึ่งเป็นพื้นฐานสำหรับงานต่าง ๆ เช่น การรู้จำวัตถุ การวัดขนาด การตรวจสอบข้อบกพร่อง และการควบคุมหุ่นยนต์
1. การตรวจจับเส้นโครงร่างคืออะไร?
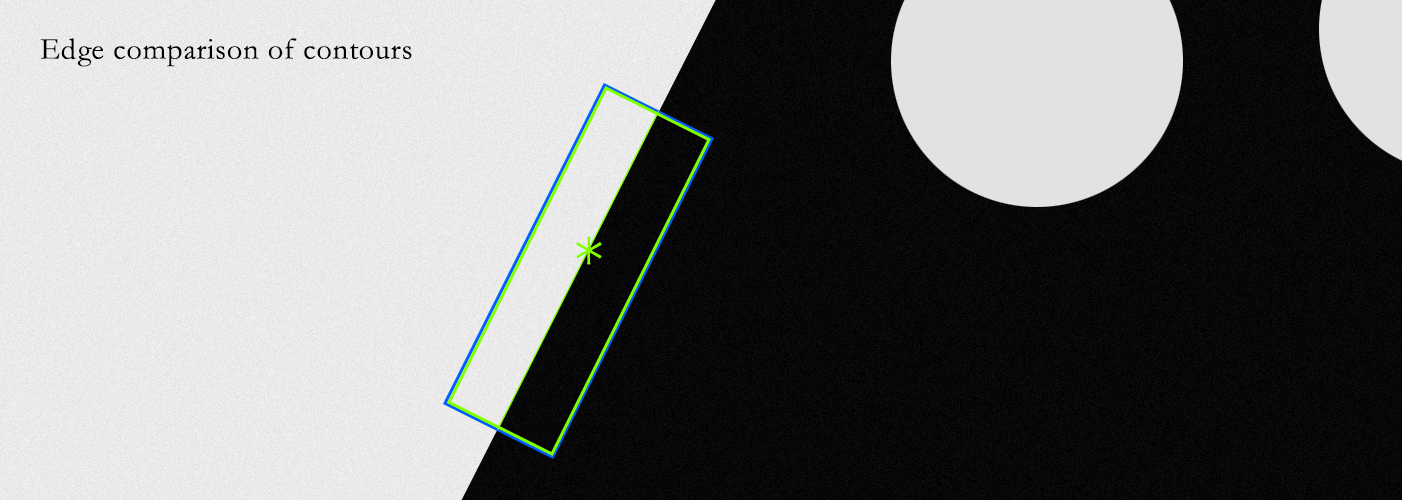
"เส้นคอนทัวร์" ในการประมวลผลภาพ คือ เส้นโค้งที่เชื่อมต่อจุดต่าง ๆ ที่ต่อเนื่องกัน (ตามขอบเขตของวัตถุ) ซึ่งมีความเข้มหรือสีเดียวกัน โดยทำหน้าที่แยกวัตถุออกจากพื้นหลัง มีลักษณะแตกต่างจากเส้นขอบแบบดิสครีต (การเปลี่ยนแปลงระดับความสว่างของพิกเซล) เพราะเส้นคอนทัวร์เป็นเส้นโค้งที่ต่อเนื่องกัน (หรือเส้นเปิดสำหรับวัตถุบางส่วน) ซึ่งแสดงถึงวัตถุทั้งหมด รูปทรง ไม่ใช่เพียงแค่การเปลี่ยนแปลงของความเข้มแบบแยกส่วน
เป้าหมายหลักของการตรวจจับเส้นคอนทัวร์คือการลดทอนข้อมูลภาพให้เรียบง่าย: การแปลงภาพแบบ 2 มิติให้กลายเป็นเส้นคอนทัวร์แบบ 1 มิติ ช่วยให้เครื่องจักรสามารถวิเคราะห์รูปทรงเรขาคณิตของวัตถุ (ขนาด มุม ความสมมาตร) ได้อย่างมีประสิทธิภาพ โดยไม่จำเป็นต้องประมวลผลทุกพิกเซล ซึ่งเป็นสิ่งสำคัญสำหรับการใช้งานแบบเรียลไทม์ที่ต้องการทั้งความเร็วและความแม่นยำ
2. หลักการพื้นฐาน
การตรวจจับเส้นคอนทัวร์อาศัยขั้นตอนหลัก 2 ขั้นตอน ได้แก่ การเตรียมข้อมูลเบื้องต้น (เพิ่มความคมชัดระหว่างวัตถุกับพื้นหลัง) และ การแยกเส้นคอนทัวร์ (ระบุจุดที่อยู่บนขอบเขต) ขั้นตอนเหล่านี้ช่วยแก้ปัญหาข้อบกพร่องของภาพดิบ เช่น สัญญาณรบกวน แสงสว่างไม่สม่ำเสมอ หรือคอนทราสต์ต่ำ ซึ่งทำให้ไม่สามารถมองเห็นขอบเขตได้ชัดเจน
2.1 การเตรียมข้อมูลเบื้องต้น
ภาพดิบมักมีขอบเขตไม่ชัดเจน ดังนั้นการเตรียมข้อมูลจึงมีความสำคัญอย่างมาก:
การแปลงเป็นโทนสีเทา : อัลกอริทึมส่วนใหญ่ใช้ภาพโทนสีเทาแบบหนึ่งช่องสัญญาณ (ทำให้ข้อมูลง่ายขึ้นจากการใช้ช่องสัญญาณ RGB สามช่องเป็นหนึ่งช่อง เนื่องจากสีมักไม่เกี่ยวข้องกับงาน)
การลดความรุนแรง : การเบลอแบบเกาส์เซียน (Gaussian blurring) ช่วยทำให้ภาพเรียบขึ้นโดยใช้ตัวกรองเกาส์เซียน ลดสัญญาณรบกวนความถี่สูงในขณะที่ยังคงการเปลี่ยนแปลงความเข้มที่สำคัญไว้ ซึ่งมีความสำคัญต่อการป้องกันขอบที่ผิดพลาดอันเนื่องมาจากสัญญาณรบกวนของเซ็นเซอร์หรือการเปลี่ยนแปลงของแสง
การตรวจจับขอบ (edge detection) : ระบุการเปลี่ยนแปลงของความเข้มระดับพิกเซล (ขอบ) ที่สร้างเส้นโครงร่าง (contour) ซึ่ง ตัวตรวจจับขอบแบบแคนนี (Canny Edge Detector) (วิธีการหลายขั้นตอน: การทำให้เรียบ การคำนวณเกรเดียนต์ การกดไม่ให้ค่าสูงสุดเกิน (non-maximum suppression) การทำ Thresholding แบบ Hysteresis) เป็นมาตรฐานอ้างอิงที่ให้เส้นขอบบางและต่อเนื่อง ตัวดำเนินการโซเบล (Sobel Operator) ซึ่งเน้นขอบแนวนอน/แนวตั้ง มีประสิทธิภาพสำหรับขอบที่กว้าง
การทำ Thresholding : แปลงแผนที่ขอบโทนสีเทาให้เป็นภาพแบบไบนารี (ขาว/ดำ) โดยให้ส่วนหน้า (เส้นขอบวัตถุ) เป็น 1 และพื้นหลังเป็น 0 ทำให้การติดตามเส้นโครงร่างง่ายขึ้น
2.2 การแยกเส้นโครงร่าง
หลังการเตรียมข้อมูล ขั้นตอนวิธีจะทำการติดตามพิกเซลพื้นหน้าที่เชื่อมโยงกันเพื่อสร้างเส้นโครงร่าง (contours) โดย Freeman Chain Code ถูกใช้อย่างแพร่หลาย: มันแสดงเส้นโครงร่างเป็นรหัสทิศทาง (ขึ้น ลง ซ้าย ขวา) เทียบกับพิกเซลก่อนหน้า ลดการใช้พื้นที่จัดเก็บและทำให้เปรียบเทียบรูปร่างได้ง่าย ไลบรารีอย่าง OpenCV ช่วยให้ง่ายขึ้นด้วยฟังก์ชันเช่น findContours() ซึ่งคืนค่าพิกัดของเส้นโครงร่าง และอนุญาตให้กรอง (ตามพื้นที่หรืออัตราส่วนด้าน) เพื่อลบสัญญาณรบกวน

3. เทคนิคขั้นสูง
วิธีการแบบดั้งเดิมใช้ได้ผลดีในสภาพแวดล้อมที่ควบคุมและมีคอนทราสต์สูง แต่ในสถานการณ์จริง (เช่น แสงสว่างไม่สม่ำเสมอ วัตถุทับซ้อนกัน) จำเป็นต้องใช้วิธีการขั้นสูงดังนี้
การปรับค่า Threshold แบบปรับตัว คำนวณค่า Threshold สำหรับแต่ละพิกเซลแบบเฉพาะที่ (แทนการใช้ค่า Threshold เดียวทั่วทั้งภาพ) เหมาะสำหรับภาพที่มีสภาพแสงเปลี่ยนแปลง เช่น ชิ้นส่วนอุตสาหกรรมภายใต้แสงสว่างของโรงงาน
การตรวจจับด้วย Deep Learning : โครงข่ายประสาทเทียมแบบคอนโวลูชัน (CNNs) แยกขอบเขตโดยตรงจากภาพดิบ โดยข้ามขั้นตอนเตรียมข้อมูลแบบทำด้วยมือ โมเดลเช่น HED (ตัวตรวจจับขอบแบบองค์รวม) และ RCF (คุณสมบัติการรวมแบบอุดมสมบูรณ์) ผสานรวมคุณสมบัติ CNN หลายระดับความละเอียดเพื่อสร้างแผนที่ขอบความละเอียดสูง ให้ผลลัพธ์ยอดเยี่ยมในฉากที่ซับซ้อน (ภาพทางการแพทย์ หรือสภาพแวดล้อมที่มีสิ่งกีดขวาง)
4. อุปสรรคสำคัญ
แม้จะมีความก้าวหน้า แต่ยังมีอุปสรรคในโลกแห่งความเป็นจริงที่เหลืออยู่:
สัญญาณรบกวนและแสงสว่าง : พื้นโรงงาน แสงน้อย หรือสภาพแวดล้อมกลางแจ้ง ทำให้เกิดเส้นโครงร่างขาดตอน/ผิดพลาด
วัตถุที่ทับซ้อน/ถูกบัง : ชิ้นส่วนที่ซ้อนกันทำให้เส้นโครงร่างรวมกัน ยากต่อการแยกแยะรูปร่างแต่ละชิ้น
วัสดุที่โปร่งใส/สะท้อนแสง : กระจกหรือโลหะทำให้แสงกระเจิง ส่งผลให้เกิดขอบที่อ่อนแอ/เพี้ยน
ผลงานในเวลาจริง : งานอุตสาหกรรม (การตรวจสอบบนสายการผลิต) ต้องการ 30+ เฟรมต่อวินาที (FPS) โมเดลการเรียนรู้เชิงลึกจำเป็นต้องมีการปรับปรุงประสิทธิภาพ (การจัดระดับควอนไทซ์ การเร่งด้วย GPU) เพื่อให้ตอบสนองความเร็วที่ต้องการ
5. การประยุกต์ใช้งานจริง
การตรวจจับเส้นโครงร่างขับเคลื่อนระบบอัตโนมัติในหลายอุตสาหกรรม:
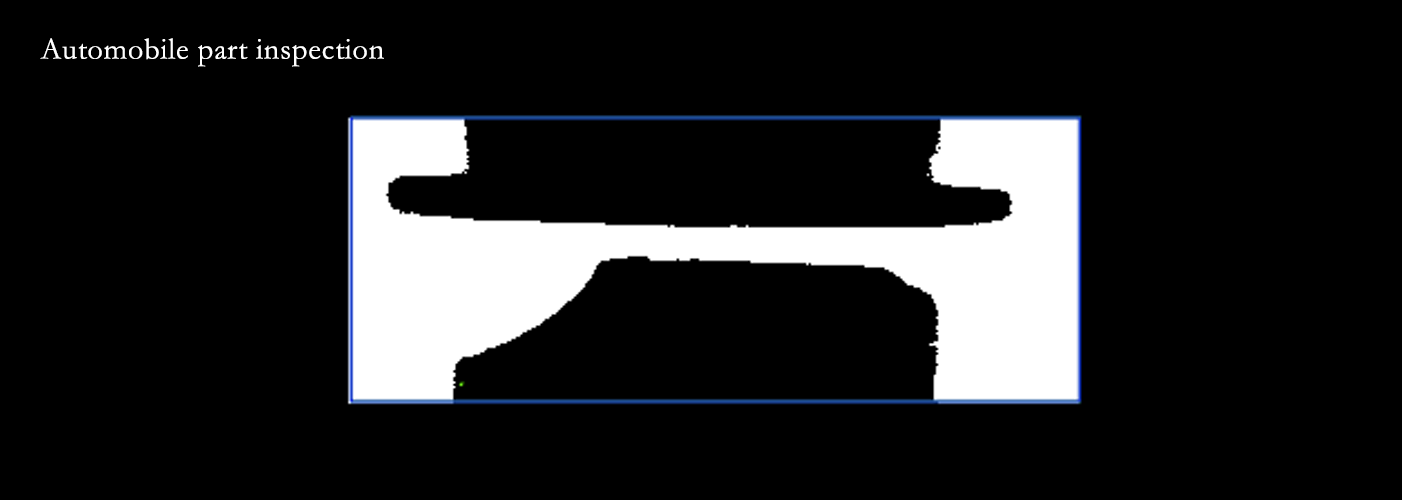
การตรวจสอบคุณภาพทางอุตสาหกรรม : ตรวจสอบข้อบกพร่อง (รอยร้าว รอยบุบ) ในการผลิต เช่น ในสายการผลิตยานยนต์ จะยืนยันว่าชิ้นส่วนเครื่องยนต์ (เฟือง ซีลยาง) มีเส้นโครงร่างตรงกับแบบ แล้วปฏิเสธชิ้นส่วนที่ไม่ตรงตามค่าที่กำหนด
หุ่นยนต์หยิบและวาง (Robotic Pick-and-Place) :ช่วยให้หุ่นยนต์ค้นหาวัตถุได้ ในคลังสินค้า แขนหุ่นยนต์ใช้รูปทรงเพื่อค้นหาบรรจุภัณฑ์บนสายพานลำเลียง คำนวณจุดศูนย์กลาง/ทิศทาง และปรับการจับยึด
ตลาดการถ่ายภาพทางการแพทย์ : แยกโครงสร้างทางกายวิภาค (ก้อนเนื้อในภาพถ่าย CT scan ขอบเซลล์ในสไลด์เนื้อเยื่อ) เพื่อช่วยในการวินิจฉัย โมเดลการเรียนรู้เชิงลึกสามารถจัดการเนื้อเยื่อชีวภาพที่มีความแปรปรวนได้ดี
การเกษตร :คัดแยกผลไม้ (แอปเปิ้ล ส้ม) ตามขนาด/ความสุกโดยการวิเคราะห์เส้นชั้นความสูง และตรวจจับโรคพืชจากการเปลี่ยนแปลงเส้นชั้นความสูงใบ
การตรวจสอบจราจร ติดตามยานพาหนะ วัดการเคลื่อนที่ หรือระบุอุบัติเหตุ (ผ่านรูปทรงที่ผิดปกติหรือวัตถุที่อยู่นิ่ง) โดยใช้กล้องวงจรปิด
6. แนวโน้มในอนาคต
แนวโน้มสามประการที่จะกำหนดรูปร่างการตรวจจับ:
การผสานรวม AI ที่ขอบเครือข่าย (Edge AI Integration) แบบจำลองที่มีขนาดเล็กและเบาบาง (CNNs ที่ถูกแปลงขนาด) บนอุปกรณ์ที่ขอบเครือข่าย (กล้องอุตสาหกรรม โดรน) ช่วยให้การประมวลผลแบบเรียลไทม์โดยไม่ต้องพึ่งพาคลาวด์ ซึ่งมีความสำคัญต่อหุ่นยนต์อัตโนมัติ
การผสานข้อมูลหลายโหมด (Multi-Modal Fusion) การรวมข้อมูลภาพกับ LiDAR/การถ่ายภาพความร้อน จะช่วยเพิ่มประสิทธิภาพในการตรวจจับภายใต้สภาพแวดล้อมที่ท้าทาย (เช่น การถ่ายภาพความร้อนช่วยเพิ่มประสิทธิภาพขอบเขตในที่แสงน้อย; LiDAR เพิ่มความลึก 3 มิติสำหรับวัตถุที่ทับซ้อนกัน)
AI ที่สามารถอธิบายได้ (Explainable AI - XAI) :เทคนิค XAI จะช่วยชี้แจงว่าโมเดลการเรียนรู้เชิงลึกตรวจจับเส้นขอบได้อย่างไร ซึ่งจะช่วยสร้างความไว้วางใจในสาขาที่สำคัญ (การวินิจฉัยทางการแพทย์ การตรวจสอบการบินและอวกาศ)
สรุป
การตรวจจับเส้นขอบของระบบวิชันแมชชีนวิชันเชื่อมโยงข้อมูลภาพดิบเข้ากับข้อมูลเชิงลึกที่นำไปปฏิบัติได้จริง ขับเคลื่อนระบบอัตโนมัติและการควบคุมคุณภาพ ตั้งแต่การตรวจจับขอบแบบดั้งเดิมไปจนถึงการเรียนรู้เชิงลึก ได้มีการพัฒนาเพื่อรับมือกับความท้าทายที่ซับซ้อน เมื่อเทคโนโลยีก้าวหน้าขึ้น ระบบนี้จะยังคงเป็นหัวใจสำคัญของระบบอัจฉริยะ ทำให้เครื่องจักรมีประสิทธิภาพและเชื่อถือได้มากขึ้นในทุกอุตสาหกรรม





