Endüstriyel Kamera Görüşünün Şifresini Çözmek: İnceleme Prensiplerine Derin Bir Bakış
Endüstriyel kameralar, makine görüşünün gözleridir ve temel prensiplerini anlamak performansı optimize etmek için anahtardır. Bu makale, endüstriyel kamera görüşünün temelinde yatan teknolojiyi detaylandırarak mühendisleri ve meraklıları sistemlerini başarı için iç işleyişleri kavramaları ve hassas ayarlar yapmaları konusunda destekliyor.
1. Bir Endüstriyel Kameraların Temel Bileşenleri
Prensiplere dalmadan önce, temel yapı taşlarını anlayalım:
Optik sistem: Mercek, ışığı toplayan kalptir. Uygulamanın görüş alanı, alan derinliği ve çözünürlüğüyle uyumlu bir mercek seçmek çok önemlidir. Örneğin, 5 megapiksellik bir kamera, detayları piksel boyutuna kadar çözülebilecek bir merceğe ihtiyaç duyar.
Sensör: CMOS veya CCD sensörü, ışığı elektrik sinyallerine dönüştürür. Ana metrikler dahil et Kuantum Verimlilik (QE) ki ideal olarak optimal ışık dönüşümü için %60'ın üzerinde olmalıdır ve Dinamik aralık ki geniş bir ışık yoğunluğu aralığını işlemek için 70 dB'den yüksek olmalıdır.
Görüntü İşlemcisi: Bu bileşen, Bayer interpolasyonu , gürültü azaltımı , ve renk düzeltmesi gibi görevleri üstlenir ve beyaz tonları dengelemek için 3x3 matris gibi algoritmaları kullanır.

2. Endüstriyel Kamera Görüşünün Temel Prensipleri
Görüntü yakalandıktan sonra anlamlı verileri çıkarmak için bu gelişmiş prensipler devreye girer:
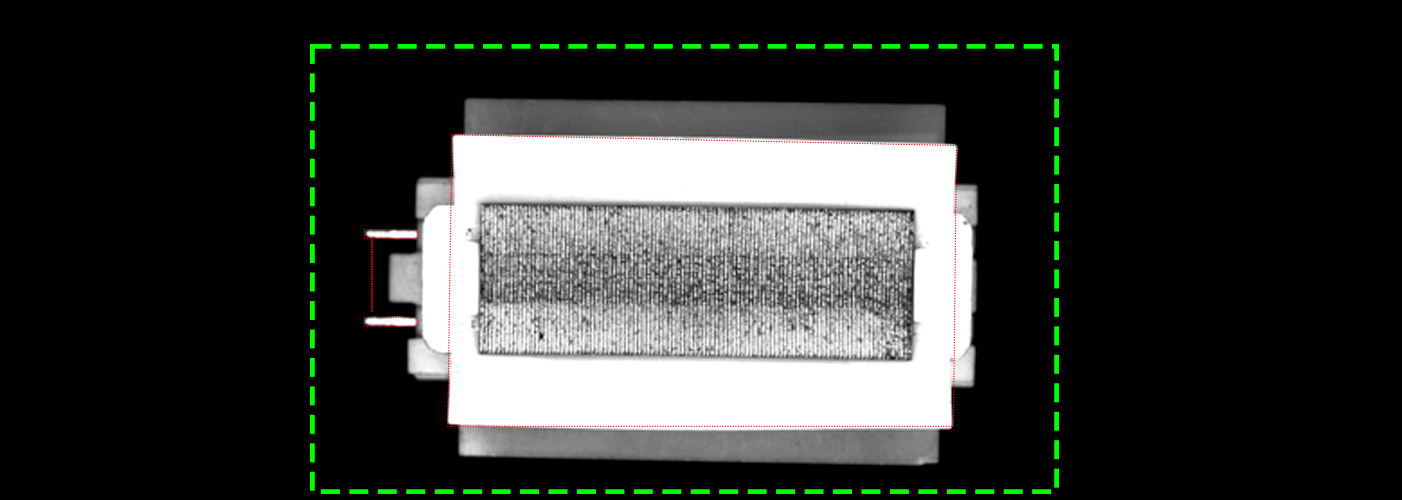
Özellik Çıkarma: Canny operatörü gibi algoritmalar kenar algılama veya Şablon Eşleme için Normalize Edilmiş Korelasyon (NCC) belirli hedefleri alt-piksel hassasiyetiyle konumlandırmak ve genellikle 0.1px doğruluğa ulaşmak için kullanılır.
Bozulma Düzeltme: Ölçüm doğruluğunu sağlamak için bozulma kalibrasyon yöntemleri kullanılarak düzeltilir. Bu işlem, ölçüm hatalarını ±0.05mm içinde tutmak için radyal ve teğetsel bozulma katsayılarını (k1,k2,p1,p2) hesaplar.
Hareket Kompanzasyonu: Hareketli nesneler için bulanıklığı önlemek çok önemlidir. Bu, nesnenin hızına göre poz süresinin ayarlanması (örneğin, 1m/s hızla hareket eden bir nesne için ≤500μs poz süresi) ve global shutter kullanılmasıyla sağlanır.
3. Endüstriyel Kamera Sistemlerinin Pratik Uygulamaları
Bu prensipler çeşitli endüstrilerde kullanılmaktadır:
Boyutsal Ölçüm: Pikselleri gerçek dünya ölçeğine göre kalibre ederek (örneğin 1px = 0,02mm), bu sistemler ±1μm tekrarlanabilirlikle yüksek doğrulukta ölçüm yapabilir.
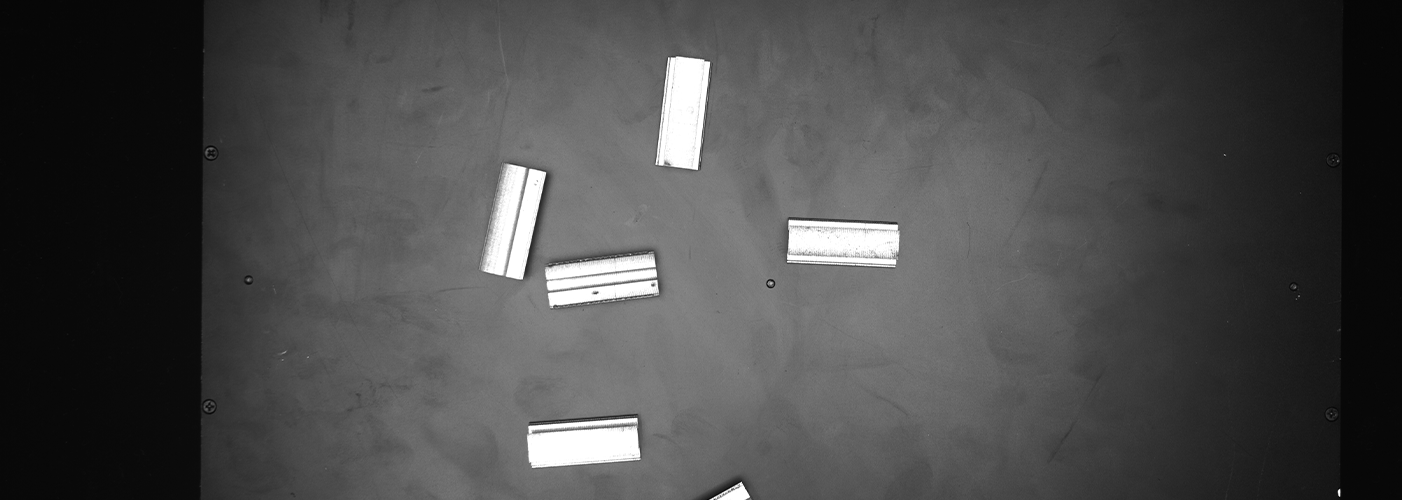
Hata Tespiti: Derin öğrenme modelleri olan ResNet18 kullanılarak endüstriyel kameralar yüzey çizikleri ve diğer hataları %99,5'in üzerinde doğrulukla sınıflandırabilir.
Robotik Rehberlik: Çok noktalı kalibrasyon sayesinde, bu sistemler kamera koordinatlarını robota ait koordinat sistemine çok küçük hata payıyla, sıklıkla 0,1°'den az olacak şekilde dönüştürerek robotları yönlendirebilir.