

Як лінійні скануючі камери покращують виявлення поверхневих дефектів
Ключові переваги лінійних скануючих камер для високошвидкісного інспектування поверхонь
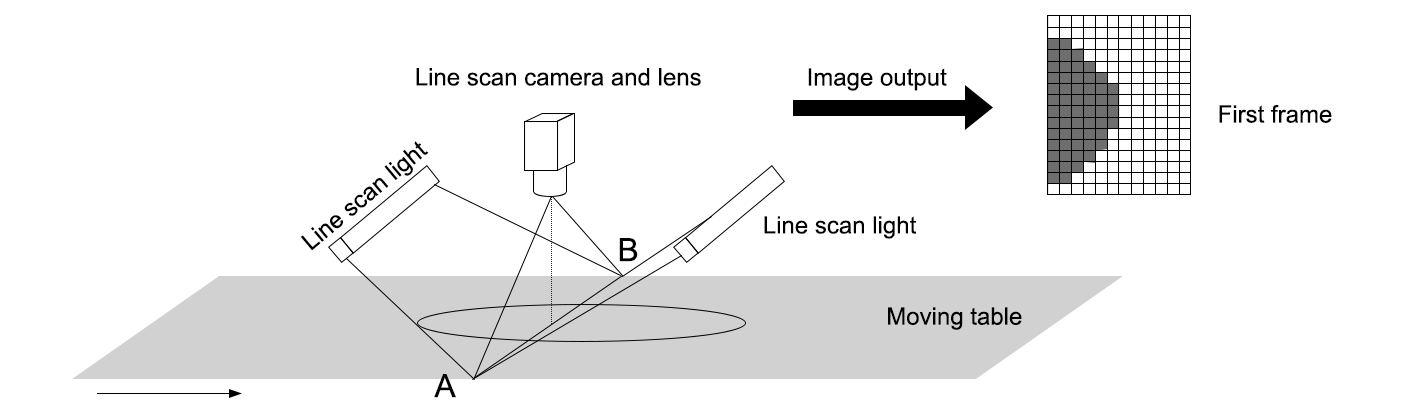
Усунення розмиття руху завдяки безперервному пострічковому захопленню
Лінійні скануючі камери працюють інакше, ніж звичайні камери, щодо усунення розмиття руху. Вони роблять знімки по одному рядку пікселів за раз, поки об’єкти проходять повз сенсор. Камера безперервно здійснює сканування, точно синхронізуючись із швидкістю руху конвеєрної стрічки — зазвичай за допомогою обертальних енкодерів. Це означає, що кожна окрема лінія сканування фіксує чіткі деталі без накладання кадрів, яке призводить до розмиття. У порівнянні з площинними скануючими камерами, що роблять повні знімки одночасно, лінійні системи зберігають чіткість навіть тоді, коли матеріали проходять зі швидкістю понад 5 метрів за секунду. Для таких галузей, як виробництво металевої фольги або текстильне виробництво, де найбільш важливо забезпечити високу якість, це має принципове значення. Звичайні камери просто не встигають за процесом і в результаті отримують розмиті або взагалі непридатні для використання зображення. Недавні дослідження, опубліковані в 2023 році, показали, що ці спеціалізовані системи мають менше ніж 0,1 % помилок, спричинених розмиттям руху під час високошвидкісної роботи — що є дуже вражаючим показником для будь-якого підприємства, що експлуатує автоматизовані лінії технічного контролю.
Подолання обмежень частоти кадрів у площинних камерах у веб-орієнтованих виробничих лініях
Стандартні камери з площинним скануванням досягають межі щодо частоти кадрів, зазвичай не перевищуючи 200 кадрів/с. Це робить їх практично непридатними для контролю матеріалів, які постійно рухаються вздовж виробничої лінії. Проблема полягає в тому, що ці камери роблять знімки через певні інтервали, тож між окремими кадрами виникають невеликі часові проміжки, під час яких дефекти можуть уникнути виявлення. Камери з лінійним скануванням вирішують цю проблему принципово інакше. Вони не роблять повних знімків одразу, а натомість формуємо зображення по одному вертикальному рядку за раз. Це означає, що в даних зображення зовсім немає пропусків — незалежно від того, наскільки довгим є матеріал, що підлягає контролю. Це має велике значення, наприклад, у виробництві паперу, перевірці сонячних панелей або забезпеченні якості електродів акумуляторів. Практичні випробування показують, що такі системи з лінійним скануванням виявляють дуже малі дефекти розміром менше одного міліметра навіть тоді, коли виробнича лінія працює зі швидкістю 10 метрів за секунду — чого звичайні камери з площинним скануванням просто не в змозі досягти.
Оптимізація параметрів лінійної скануючої камери для надійного виявлення дефектів
Розмір пікселя, частота зчитування рядка та швидкість руху матеріалу: застосування критерію Найквіста–Шеннона для виявлення дефектів менших за розмір пікселя
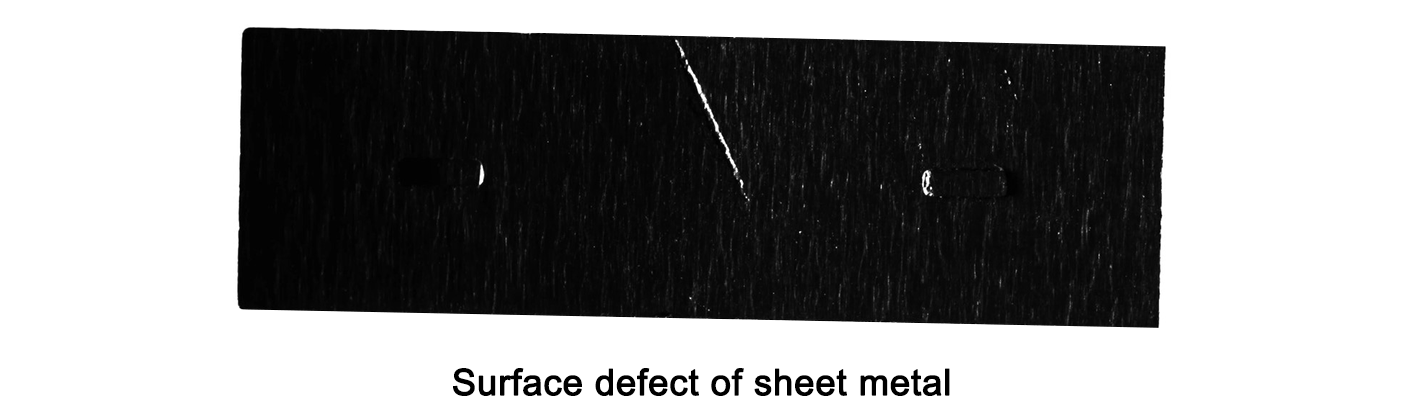
Правильне встановлення параметрів має велике значення під час виявлення тих мікроскопічних дефектів, які ми шукаємо. Розмір пікселя (pitch) фактично визначає теоретичну межу роздільної здатності щодо деталей. Наприклад, при розмірі пікселя 10 мікрометрів система здатна виявляти особливості розміром близько 10 мікрометрів. Однак, згідно з правилом дискретизації Найквіста–Шеннона, для кожного дефекту потрібно щонайменше два пікселі, а ідеально — три чи чотири, щоб уникнути неприємних ефектів накладання (aliasing) й отримати точні зображення. При контролі матеріалів, що рухаються зі швидкістю 5 метрів за секунду, виявлення дефекту розміром 50 мікрометрів стає складним, якщо система не здатна забезпечити лінійну частоту понад 100 кГц. Узгодження лінійної частоти зі швидкістю руху стрічки запобігає розмиттю зображень під час інспекції. Якщо дискретизація виконана неправильно, такі малі дефекти або зовсім зникають, або виглядають спотвореними. Правильне узгодження всіх цих параметрів забезпечує чітке виявлення навіть найдрібніших тріщин у вигляді волосинок та мікроподряпин, навіть якщо їхні розміри менші за розмір окремого пікселя.
Точне визначення місця дефекту за допомогою лінійного сканування з синхронізацією кодувальника
Отримання точних координат дефектів на матеріалах, що постійно рухаються (наприклад, плівках, тканинах або металевих листах), вимагає синхронізації руху матеріалу з процесом зняття зображень із точністю до мікрометра. Це забезпечують квадратурні кодувальники. Під’єднані до валів або привідних валів, вони у реальному часі генерують сигнали положення, які в свою чергу запускають зчитування кожної лінії сканування точно в той момент, коли матеріал проходить повз неї. Уся система працює у замкнутому циклі, тому відсутнє зміщення відносно заданої позиції. В результаті будь-які дефекти фіксуються саме в їхніх фактичних положеннях на поверхні матеріалу, навіть якщо він рухається зі швидкістю понад 10 метрів за секунду. Така точність має вирішальне значення в системах контролю якості, де швидкість і точність повинні співіснувати.
Інтеграція квадратурного кодувальника забезпечує повторюваність позиціонування з точністю ±0,1 мм на рухомих полотнах
Сучасні системи енкодерів здатні визначати положення з інтервалом 0,1 мікрометра, що означає, що координати повторюються зі стабільною точністю приблизно ±0,1 міліметра під час багаторазових вимірювань. Такий рівень деталізації дозволяє автоматизованим системам виявляти та відокремлювати браковані деталі, витрачаючи при цьому мінімальну кількість матеріалу. Цей ступінь точності є критично важливим у галузях, де якість має першочергове значення. Розгляньте, наприклад, оптичні покриття, виробництво електродів для акумуляторів або фольгу, що використовується для упаковки медичних препаратів. Ці галузі спираються на точні вимірювання не лише для виявлення дефектів, а й для відстеження виробничих даних та статистичного контролю процесів. Також особливо важливо, як енкодери забезпечують синхронізацію всіх компонентів навіть під час прискорення чи уповільнення роботи машин. Це дозволяє підтримувати правильне позиціонування під час постійних циклів запуску та зупинки, які характерні для роботи на виробничих площах.
Розширення сфер застосування: від плоских полотен до криволінійних та обертових поверхонь
Інспекція циліндричної поверхні за допомогою обертальних енкодерів та багатолінійних лінійних скануючих камер
Технологія лінійного сканування чудово працює не лише на плоских поверхнях, а й на різноманітних криволінійних та обертових формах — таких як труби, валки, пляшки та довгі деталі автомобілів. У системі використовуються обертальні енкодери для синхронізації моменту отримання зображень із обертанням об’єкта. Це забезпечує досить точне позиціонування з похибкою близько ±0,1 мм навіть при швидкості обертання до 500 обертів на хвилину. Коли компанії розміщують кілька ліній сканування поруч одна з одною й одночасно задіюють кілька сенсорів, вони можуть отримувати велику кількість скануючих ліній за один раз. Таким чином досягається повне 360-градусне покриття будь-якої поверхні, що підлягає контролю, без пропущених ділянок або прогалин, де можуть «ховатися» дефекти.

Для криволінійних поверхонь спеціалізовані оптичні конструкції (наприклад, телецентричні або спеціальні циліндричні лінзи) та алгоритми кутової компенсації коригують відхилення фокальної площини, зберігаючи роздільну здатність на складних топографіях. Промислова валідація показує рівень виявлення дефектів понад 99,2 % на складних геометріях. Основні можливості включають:
- Усунення спотворення поверхні за рахунок компенсації кутів у реальному часі
- Вимірювання діаметра безпосередньо під час обертання
- Виявлення мікроскрець (< 5 мкм) на високовідбивних або текстурованих поверхнях
- Безперебійна інтеграція з роботизованими системами полірування, нанесення покриттів або сортування
Архітектура адаптується до важких умов експлуатації — від ліній литейного виробництва з високою вібрацією до чистих приміщень класу ISO 5, що сприяє поширенню її застосування в аерокосмічній галузі (композитні матеріали), виробництві медичних пристроїв та контролі компонентів для відновлюваних джерел енергії.
Готові підвищити ефективність виявлення поверхневих дефектів за допомогою лінійних скануючих камер?
Лінійні скануючі камери є основою надійного та високошвидкісного виявлення поверхневих дефектів — жодна система сканування площі не може зрівнятися з ними за безперервним охопленням, усуненням розмиття руху та точністю на рівні мікронів при повній швидкості виробництва. Оптимізувавши параметри лінійного сканування, синхронізацію з енкодером та оптичну конструкцію під ваші потреби щодо матеріалу та виявлення дефектів, ви зменшите кількість пропущених дефектів, скоротите відходи матеріалу й забезпечите стабільний та економічно ефективний контроль якості на вашій виробничій лінії.
Для промислових рішень із лінійними скануючими камерами, адаптованих до вашого застосування для контролю поверхонь, або для створення повністю інтегрованої системи машинного зору з додатковим освітленням, об’єктивами та інструментами синхронізації з енкодером (як пропонує HIFLY), співпрацюйте з постачальником, що має глибокі знання в галузі промислового машинного зору. 15-річний досвід HIFLY охоплює високошвидкісні лінійні скануючі камери 10 GigE 8K, багатоспектральні системи візуалізації та комплексні рішення для контролю поверхонь — підтверджені сертифікатом ISO 9001:2015, понад 30 винахідницькими патентами та підтримкою понад 2500 клієнтів у більш ніж 30 країнах. Зв’яжіться з нами вже сьогодні для безкоштовної консультації з метою оптимізації вашої системи виявлення дефектів поверхні за допомогою лінійних скануючих камер.





