

Скільки промислових камер може підтримувати один хост у системі зору?
У сучасних системах зору визначення кількості камер, які може підтримувати один хост (наприклад, комп'ютер або сервер), є критичним питанням для проектування системи, масштабування та оптимізації витрат. Відповідь залежить від багатьох взаємопов'язаних факторів, включаючи можливості апаратного забезпечення, ефективність програмного забезпечення, специфікації промислових камер та вимоги застосування. Ця стаття розглядає ці ключові змінні та надає рамки для оцінки місткості камер у системі зору.
1. Апаратні компоненти та їх вплив
Апаратне забезпечення хоста є фундацією підтримки камер, де два ключових аспекти грають головну роль.
1.1 Обробляючі модулі: CPU та GPU
Процесор CPU виконує широкий спектр завдань обробки зображень, від базового фільтрування до складної інференції машинного навчання. Високорозрізнені чи високочастотні камери генерують великі об'єми даних, що накладають велику вагу на CPU. Багатоядерні CPU, такі як Intel i9 або AMD Threadripper, можуть розподіляти завдання між ядрами для паралельної обробки. З іншого боку, GPU революціонують системи комп'ютерного бачення, прискорюючи паралельні обчислення, особливо важливі для завдань, таких як 3D-бачення та глибинне навчання у самостійному управлінні. Камери, інтегровані з GPU-оптимізованими пайплайнами, наприклад, CUDA в NVIDIA GPU, перенесуть обробку з CPU, потенційно збільшуючи кількість підтримуваних камер утричі.
1.2 Пам'ять, сховище та вхід/вихід
Достатньої RAM необхідно для буферизації відеопотоків і оброблених даних. Камера 4K з частотою 30 FPS генерує приблизно 300 MB/с негнучених даних, що збільшує вимоги до пам'яті у системах з кількома камерами. Для високорозрішних камер виділяйте мінімум 4–8 ГБ RAM на кожну камеру. Швидке сховище, наприклад NVMe SSD, та надійні інтерфейси I/O, такі як USB 3.2 і PCIe, є важливими для зчитування і зберігання даних. Застарілі інтерфейси можуть серйозно обмежувати масштабованість системи.
2. Промисловість Параметри камер
Параметри промислових камер безпосередньо впливають на навантаження хост-системи, головним чином через наступні два ключові фактори.
2.1 Розширення та частота кадрів
Вища роздільна здатність і частота кадрів означають більше даних для обробки. Камера 4K виробляє у чотири рази більше пікселів, ніж камера 1080p, що значно збільшує вимоги до обробки. Подібним чином, камера 120 FPS генерує у чотири рази більше даних, ніж камера 30 FPS. У спортивних трансміціях використовуються високорозрізні, високочастотні камери, але вони ставлять надзвичайно велику навантаженість на хост, необхідно потужне обладнання, щоб уникнути втрат якості.
2.2 Стискання та інтерфейс
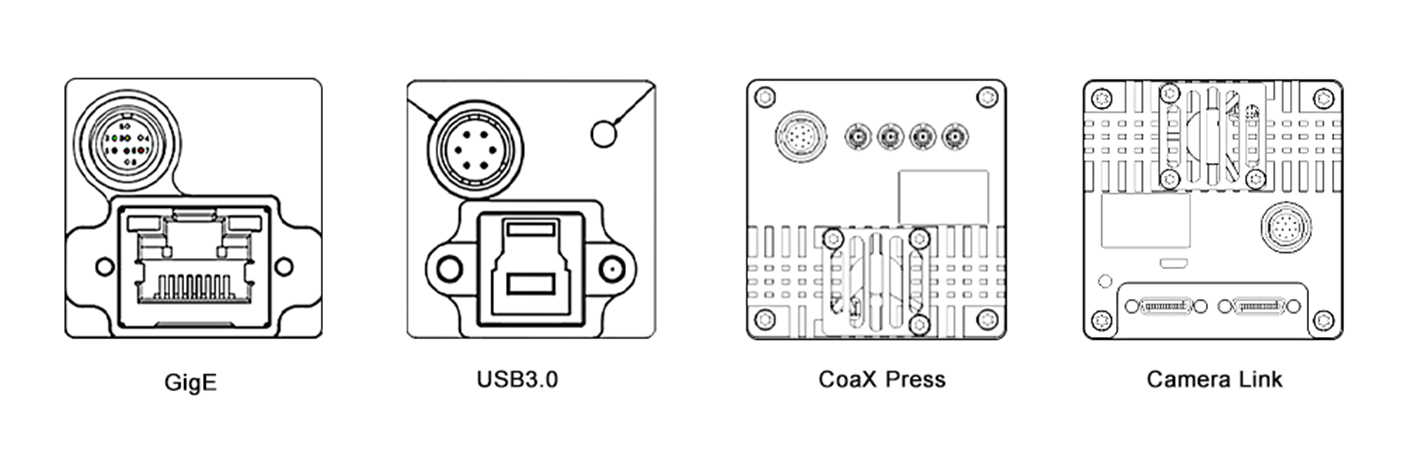
Вибір формату стиснення впливає на розмір даних та завантаження при обробці. Стиснуті формати, такі як H.264, зменшують пропускну здатність, але потребують декодування на хості. Нестиснуті формати пропонують вищу якість, але витрачають більше ресурсів. Також тип інтерфейсу камери є ключовим. Високоскоростні інтерфейси, такі як GigE Vision і CoaXPress, дозволяють ефективний перенос даних для систем з багатьма камерами, тоді як застарілі інтерфейси, такі як USB 2.0, обмежують масштабованість через обмежену пропускну здатність.
3. Програмне забезпечення та труба обробки
Ефективність програмного забезпечення є стільки ж критичною, як і ці дві області є ключовими для продуктивності системи.
3.1 Операційна система та програмні інструменти
Операційна система та її драйвери утворюють програмну основу. Реальночасові операційні системи (RTOS) мінімізують затримки, що ідеально підходить для застосувань, таких як робототехнічне керування. Системи на базі Linux популярні завдяки підтримці відкритого коду. Оптимізовані драйвери покращують продуктивність апаратного забезпечення. Програмне забезпечення для обробки зображень та бібліотеки, такі як OpenCV, MATLAB, а також фреймворки глибокого навчання, такі як TensorFlow та PyTorch, відрізняються за обчислювальною ефективністю. Наприклад, хост, що запускає моделю YOLO з прискоренням GPU, може підтримувати менше камер, ніж той, що використовує базове виявлення контурів через більшу складність.

3.2 Багатопотоковість та оптимізація
Ефективне багатопотокове виконання та паралелізація є ключовими для максимальної продуктивності системи. Багатопотокове виконання дозволяє завданням працювати одночасно на ядрах CPU, тоді як паралелізація використовує GPU для обробки даних. Технології, такі як OpenMP і CUDA, надають фреймворки для реалізації. У системі багатокамерного нагляду OpenMP може розподілити обробку потоків від камер між ядрами CPU, а CUDA може прискорити аналіз зображень на GPU, що дозволить обробляти більше камер.
4. Вимоги до застосувань
Складність візуального завдання визначає розподіл ресурсів, де реальний час та складність обробки є головними чинниками.
4.1 Обробка у режимі реального часу та офлайн-обробка
Застосунки у режимі реального часу, такі як автономне управління та промислова автоматизація, вимагають швидкої обробки з низькою латентністю, що обмежує кількість камер, які хост може підтримувати. Офлайн-обробка, наприклад, аналіз відео у пакетному режимі, може обробляти більше камер, але має затримку результатів.
4.2 Складність обробки
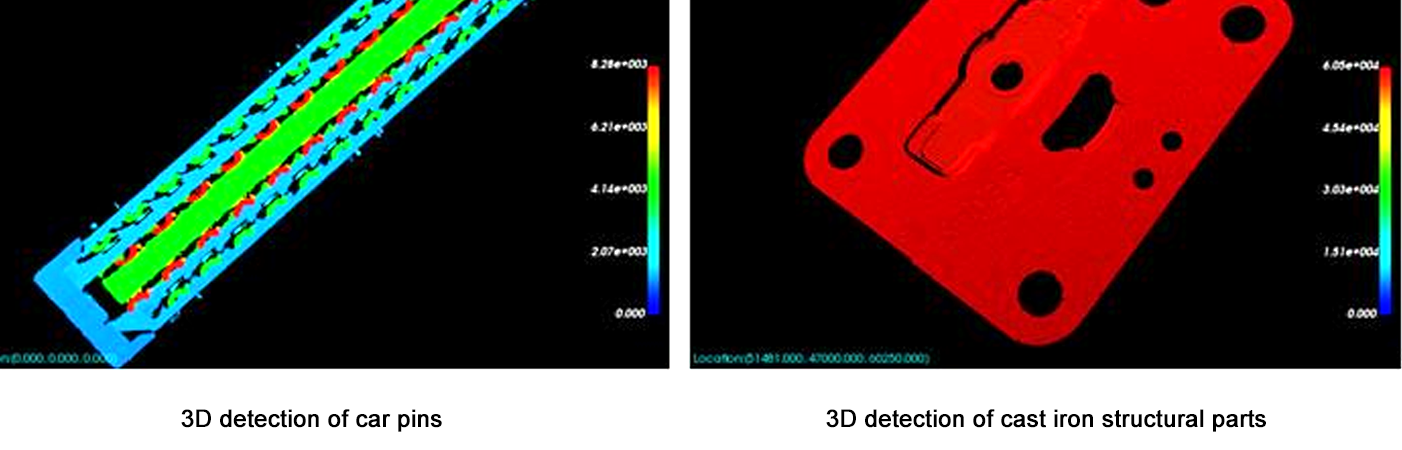
Прості завдання, такі як виявлення руху, створюють низьку обчислювальну навантаженість, що дозволяє хосту підтримувати більше камер. Складні завдання, такі як 3D-реконструкція або заступна розпізнавання облич чоловіка, вимагають значних ресурсів, зменшуючи кількість підтримуваних камер. Наприклад, хост може підтримувати 10 камер для виявлення руху, але лише 3 для реального часу оцінки глибини 3D.
5. Фреймворк оцінювання
Використовуйте наступні кроки для оцінки місткості камери:
Визначення параметрів камери: Роздільність, частота кадрів, стиснення та інтерфейс.
Обчислення пропускної здатності: Нестиснений швидкодія передачі даних = Роздільність × Частота кадрів × Глибина бітів / 8 (наприклад, 1080p при 30 FPS = 1920×1080×30×24 / 8 = ~1.4 GB/s).
Оцінка обмежень апаратного забезпечення: Переконайтеся, що потужність обробки CPU/GPU ≥ загальна пропускна здатність даних × фактор навантаження обробки (2–5× для складних завдань).
Тестування з прототипами: Використовуйте інструменти для порівняння (наприклад, Intel VTune, NVIDIA Nsight) для вимірювання використання ресурсів для однієї камери, а потім лінійно масштабуйте (з урахуванням коригувань для виграшів/втрат від паралелізації).
Висновок
Кількість камер, які хост може підтримувати в системі зору, не є фіксованою величиною, а є балансом між можливостями апаратного забезпечення, специфікаціями камер, оптимізацією програмного забезпечення та складністю завдань. Для багатьох систем початок з прототипу та поступальне масштабування при моніторингу використання ресурсів є найбільш надійним підходом. З розвитком апаратного забезпення (наприклад, швидших GPU, прискорювачів AI) та програмного забезпення (наприклад, фреймворків edge computing) за швидкими темпами, здатність підтримувати більше камер з вищою продуктивністю буде продовжувати зростати. Ця еволюція дозволить розробку більш складних та масштабованих розв'язків зору, відкриваючи нові можливості в різних галузях, від охорони здоров'я та транспорту до безпеки та розваг.
Ця стаття надає основне розуміння для системних архітекторів та інженерів, підкреслюючи необхідність спрямованого тестування та оптимізації для відповідання конкретним вимогам програм. Обираючи всі фактори, які включаються, можна проектувати системи бачення, які є як ефективними, так і здатними обробляти постійно зростаючі вимоги сучасних застосунків.





