

Контурне виявлення комп'ютерного зору
В епоху Індустрії 4.0 та інтелектуальної автоматизації машинний зір став ключовою технологією, яка дозволяє машинам «бачити» та інтерпретувати візуальні дані з точністю, що часто перевищує можливості людини. Серед її основних функцій, виявлення контурів має критичне значення: вона витягує форми меж об’єктів з цифрових зображень, створюючи основу для таких завдань, я впізнавання об’єктів, вимірювання розмірів, контроль дефектів, маніпулювання роботами.
1. Що таке виявлення контурів?
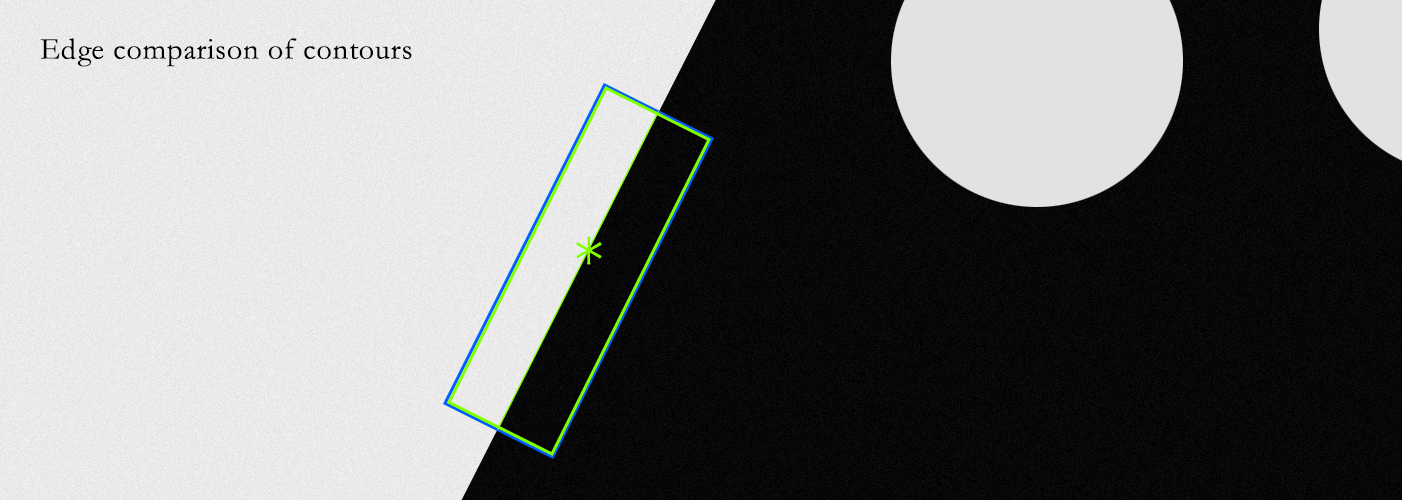
«Контур» у обробці зображень — це крива, що з'єднує неперервні точки (уздовж межі об'єкта) з однаковою інтенсивністю або кольором, відокремлюючи об'єкт від його фону. На відміну від дискретних країв (переходів світло-темно на рівні пікселів), контури є неперервними петлями (або відкритими кривими для часткових об'єктів), що представляють об'єкт форма , а не просто ізольовані зміни інтенсивності.
Основна мета виявлення контурів — це спрощення даних зображення: зменшення двовимірного зображення до одновимірних ліній контурів дозволяє машинам ефективно аналізувати геометрію об'єкта (розмір, кути, симетрію), не обробляючи кожен піксель — що є важливим для застосувань у реальному часі, де однаково важливі швидкість і точність.
2. Основні принципи
Виявлення контурів ґрунтується на двох ключових кроках: попередня обробка (підвищення контрасту між об'єктом і фоном) та витягнення контурів (ідентифікація точок межі). Ці кроки дозволяють усунути недоліки вихідного зображення, такі як шум, неоднорідне освітлення або низький контраст, які заважають чіткому визначенню меж.
2.1 Попередня обробка
Сирі зображення рідко мають чіткі межі, тому попередня обробка є життєво важливою:
Перетворення в градації сірого : Більшість алгоритмів використовує одноманітні зображення в градаціях сірого (спрощуючи дані з трьох каналів RGB до одного, оскільки колір часто не має значення).
Зниження шуму : Гаусове розмиття згладжує зображення за допомогою гаусового ядра, зменшуючи високочастотний шум із збереженням основних змін інтенсивності — критично для уникнення хибних країв через перешкоди датчиків або коливання освітлення.
Виявлення країв : Виявляє зміни інтенсивності на рівні пікселів (краї), які формують контури. Детектор Кенні (багатоступінчастий метод: згладжування, обчислення градієнта, немаксимальне пригнічення, порогова обробка за гістерезом) є золотим стандартом, забезпечуючи тонкі та неперервні краї. Оператор Собеля, який підкреслює горизонтальні/вертикальні краї, працює для товстих меж.
Порогова обробка : Перетворює зображення країв у градаціях сірого в бінарні (чорно-білі) зображення, де передній план (краї об'єктів) позначено як 1, а фон — як 0, що спрощує відстеження контурів.
2.2 Виділення контурів
Після попередньої обробки алгоритми відстежують з'єднані пікселі переднього плану, щоб утворити контури. The Код Фрімана використовується широко: він представляє контури як коди напрямків (вгору, вниз, ліворуч, праворуч) відносно попереднього пікселя, зменшуючи обсяг зберігання та дозволяючи легко порівнювати форми. Бібліотеки, такі як OpenCV, спрощують це за допомогою функцій, як findContours(), яка повертає координати пікселів контурів і дозволяє фільтрувати (за площею або співвідношенням сторін) для видалення шумів.

3. Просунуті методики
Традиційні методи працюють у контрольованих умовах із високим контрастом, але у реальних ситуаціях (нестабільне освітлення, перекриття об'єктів) потрібні просунуті підходи:
Адаптивне порогове значення : Обчислює локальні пороги для кожного пікселя (на відміну від одного загального порогу), ідеально підходить для зображень із змінним освітленням (наприклад, промислові деталі під заводськими лампами).
Виявлення на основі глибокого навчання : Згорткові нейронні мережі (CNN) безпосередньо витягують межі з вихідних зображень, пропускаючи ручну попередню обробку. Моделі, такі як HED (Holistically-Nested Edge Detector) та RCF (Richer Convolutional Features) поєднує багаторівневі ознаки CNN для отримання контурних зображень високої роздільної здатності, чудово справляється зі складними сценами (медичні зображення, захаращене оточення)
4. Ключові проблеми
Незважаючи на досягнення, залишаються реальні перешкоди:
Шум і освітлення : Виробничі цехи, погана видимість або вуличні умови призводять до перерваних/хибних контурів
Накладання/затемнення об'єктів : Складені деталі зливаються в контури, що ускладнює розпізнавання окремих форм
Прозорі/відбиваючі матеріали : Скло або метал розсіює світло, створюючи слабкі/деформовані краї.
Виконавність в реальному часі : Промислові завдання (перевірка на конвеєрі) потребують 30+ кадрів на секунду (FPS). Моделі глибокого навчання потребують оптимізації (квантування, прискорення GPU), щоб відповідати вимогам швидкості.
5. Застосування у реальному житті
Виявлення контурів сприяє автоматизації в різних галузях:
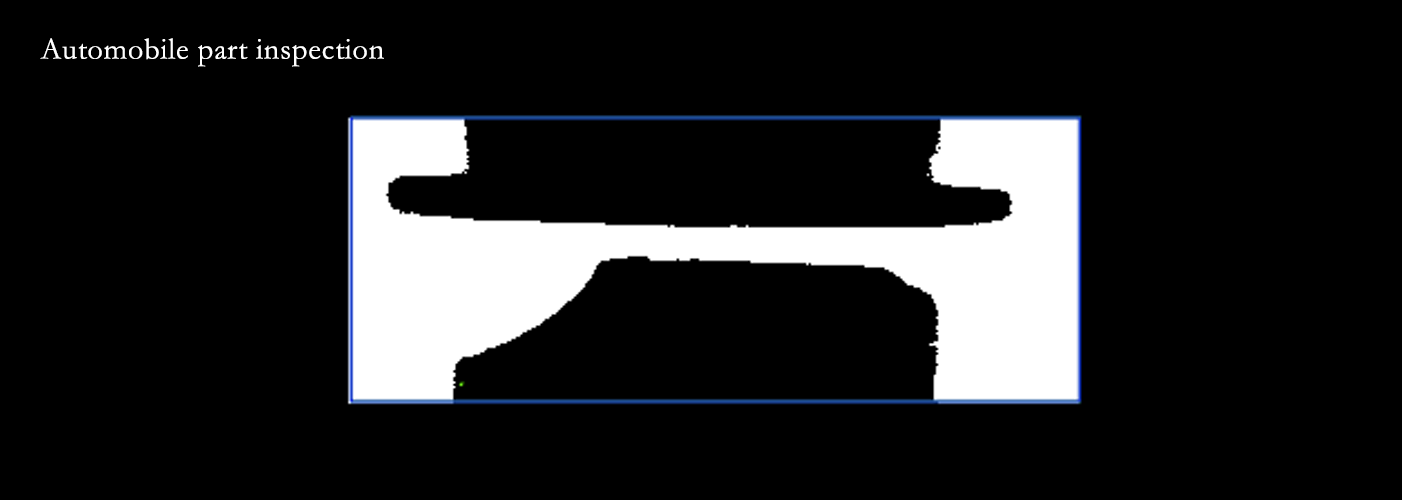
Промислова перевірка якості : Перевіряє наявність дефектів (тріщини, вм’ятини) у виробництві. Наприклад, у автомобільній промисловості перевіряють, чи відповідають контури двигунів (зубчасті колеса, прокладки) проектним специфікаціям, і відкидають деталі, що виходять за межі допусків.
Роботизоване вибіркове розміщення : Допомагає роботам знаходити об’єкти. На складах роботизовані маніпулятори використовують контури, щоб виявляти пакети на конвеєрах, обчислювати центр/орієнтацію та регулювати захоплення.
Медичній візуалізації : Виділяє анатомічні структури (пухлини на КТ-знімках, межі клітин у гістологічних препаратах) для допомоги у діагностиці. Моделі глибокого навчання добре справляються зі змінними біологічними тканинами.
Сільське господарство : Сортує фрукти (яблука, апельсини) за розміром/ступенем дозрівання за допомогою аналізу контурів і виявляє хвороби рослин за змінами контурів листя.
Моніторинг транспорту : Відстежує транспортні засоби, вимірює потік або виявляє аварії (за допомогою незвичайних контурів або нерухомих об'єктів) за допомогою камер спостереження.
6. Майбутні тенденції
Три тенденції вплинуть на виявлення контурів:
Інтеграція Edge AI : Потужні моделі (квантовані CNN) на пристроях edge-обчислень (промислові камери, дрони) забезпечують обробку в реальному часі без залежності від хмари — критично важливо для автономних роботів.
Мультимодальна інтеграція : Поєднання візуальних даних з LiDAR/тепловізійними зображеннями поліпшує виявлення в складних умовах (наприклад, тепловізійні зображення підсилюють межі в умовах поганого освітлення; LiDAR додає 3D-глибину для перекриваючих об'єктів).
Пояснювана штучна інтелектуальна система (XAI) : Методи XAI пояснять, як моделі глибокого навчання виявляють контури, забезпечуючи довіру в критичних галузях (діагностика захворювань, авіаційний контроль).
Висновок
Виявлення контурів у машинному баченні пов'язує необроблені зображення з корисною інформацією, що дозволяє автоматизувати процеси та контролювати якість. Від традиційного виявлення ребер до глибокого навчання, ця технологія еволюціонувала, щоб впоратися зі складними завданнями. У міру розвитку технологій вона залишатиметься ключовою для розумних систем, роблячи машини більш ефективними та надійними в різних галузях.





