

Процес вибору продукту для проекту машинного бачення
Чи знаєте, які етапи включається у повний процес вибору проекту з огляду? Сьогодні ми розглянемо, як вибирати компоненти для проекту машинного зору.
- Отримайте вимоги клієнта
Коли ми отримуємо пробу для детектування, що ми повинні зробити спочатку? Звичайно, це спілкуватися з клієнтом про його вимоги, оскільки проект має старатися максимально відповідати потребам клієнта. За допомогою розуміння конкретних вимог до детектування ми можемо зробити перший вибір на основі того, чи є об'єкт статичним або динамічним - тобто, вибір глобального або рулонного затвору промислової камери. Все ж таки для фотографування динамічних об'єктів потрібен глобальний затвор.
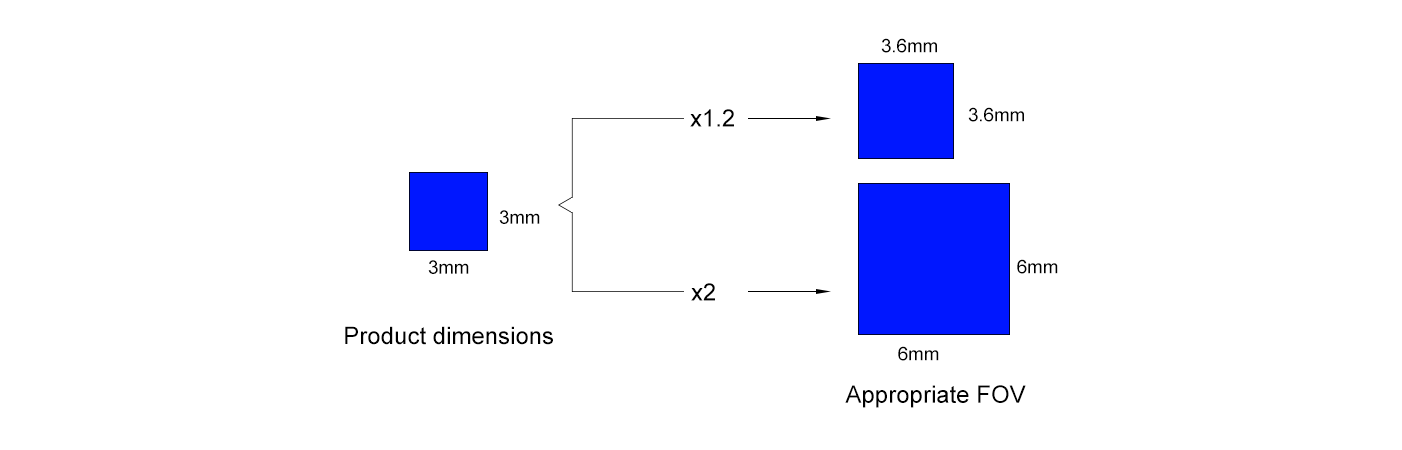
- Визначте поле O зору (FOV)
Далі нам потрібно визначити відповідний розмір FOV на основі розмірів продукту. Для зображення, FOV камери загалом найбільш підходящим є 1.2 до 2 разів більше за розмір продукту.
- Виберіть Підходяще Промисловість Лінзи
Як відомо, промислові об'єктиви камер включають телецентричні об'єктиви та FA (Factory Automation) об'єктиви, і методи обчислення FOV для різних об'єктивів відрізняються, тому нам потрібно аналізувати конкретні ситуації. Проте, оскільки обчислення FOV неможливе без врахування розміру сенсора, ми спочатку повинні обчислити розміри сенсора.

Розмір сенсора обчислюється шляхом множення роздільної здатності на розмір пікселя. Розглянемо як приклад промислову камеру роздільною здатністю 1.3 мегапікселів:
•Ширина сенсора = 1280 × 4.8 μm = 6.144 мм
• Висота сенсора = 1024 × 4.8 μм = 4.915 мм
Для телецентричних лінз поле зору обчислюється як розмір сенсора, поділений на магніфікацію лінзи. Використовуючи ту саму камеру з телецентричною лінзою 0.5×:
• Ширина зображення = 6.144 мм ÷ 0.5 = 12.288 мм
• Висота зображення = 4.915 мм ÷ 0.5 = 9.83 мм
Для промислових лінз FA обчислення поля зору є розміром сенсора × відстань до об'єкта ÷ фокусна відстань. Використовуючи ту саму камеру з відстанню до об'єкта 100 мм і фокусною відстанню 8 мм:
• Горизонтальна ширина = 6.144 мм × 100 ÷ 8 = 76.8 мм
• Горизонтальна висота = 4.915 мм × 100 ÷ 8 = 61.4 мм
Усі ці розрахунки спрямовані на вибір відповідних камер і об'єктивів з урахуванням ПДП та необхідної точності. Тому наступним кроком є розрахунок точності камери.
- Обчислити Промислова Точність камери
Для телецентричних лінз теоретична точність камери дорівнює розміру пікселя, поділеному на коефіцієнт збільшення телецентричної лінзи. Продовжуючи попередній приклад (лінза 0.5×):
• Теоретична точність = 4.8 μm ÷ 0.5 = 9.6 μm
Для промислових лінз FA теоретична точність обчислюється як ПДВ ÷ роздільність. Коли ПДВ становить 72 мм:
• Теоретична точність = 72 мм ÷ 1280 = 0.056 мм
Вище наведені теоретичні точності, і часто між теорією та практикою є значна різниця. Тому фактична точність вимагає додаткових обчислень. Наприклад:
З передньою підсвічуванням, реальна точність становить 3 до 5 разів більше теоретичної точності.
З машинним зором та задньою підсвічуванням, реальна точність може досягати 1 до 2 разів теоретичної точності.

Вища точність може бути досягнута, якщо алгоритм може інтерполювати підпіксельно.
Як всі ми знаємо, підсвічування є незамінним для візуального контроля - хороше підсвічування може забезпечити половину успіху візуального проекту. Тому необхідно вибирати джерело світла потрібного розміру для тестування підсвічування. Наприклад:
Для кілцевих світelnників машинного зору, поверхових світelnників або чашоподібних світelnників, розмір джерела світла загалом на 10% до 20% більший за FOV.
Для машинного бачення світловідбивальні лампи мають довжину джерела світла, яка загалом на 20% до 30% більша за ЗПД.
Вище наведено повний процес вибору компонентів для проекту машинного бачення. Виконуючи ці кроки, ми швидко можемо визначити необхідні продукти для проекту. Або ви можете залишити нам повідомлення, і ми допоможемо вам вибрати найбільш придатні продукти для потреб вашого проекту.





