

Phát Hiện Biên Máy Thị Giác
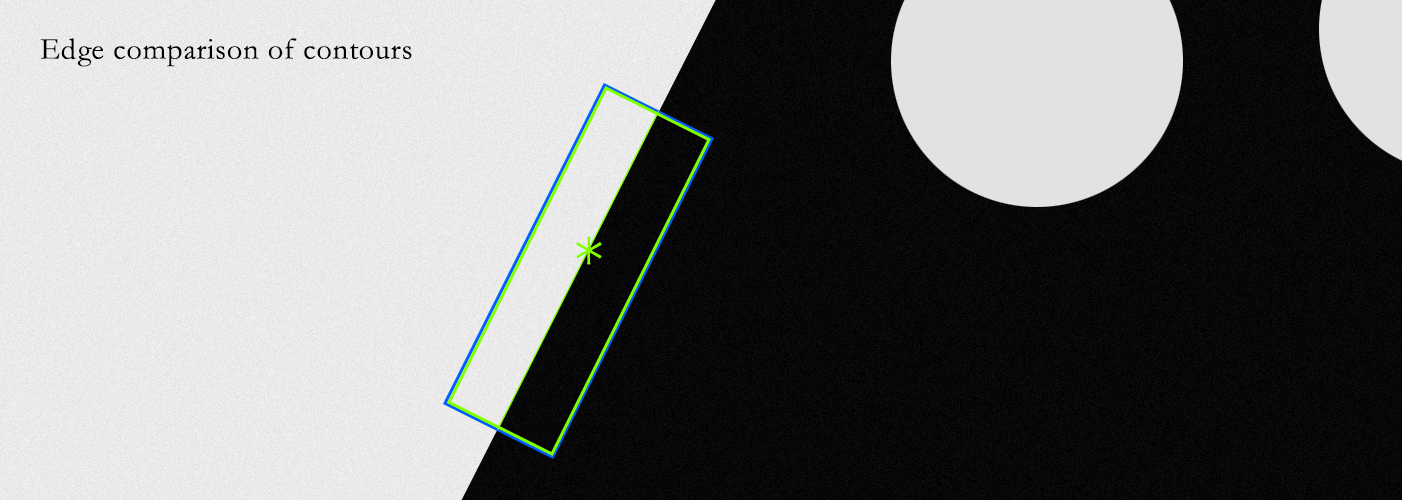
Trong thời đại Cách mạng Công nghiệp 4.0 và tự động hóa thông minh, thị giác máy đã trở thành một công nghệ cốt lõi, cho phép các cỗ máy "nhìn thấy" và diễn giải dữ liệu hình ảnh một cách chính xác, thường vượt trội hơn khả năng của con người. Trong số các chức năng chính của nó, khám phá đường viền việc phát hiện đường viền (contour detection) là rất quan trọng: nó trích xuất hình dạng đường viền của đối tượng từ hình ảnh kỹ thuật số, tạo nền tảng cho các nhiệm vụ như nhận diện đối tượng, đo kích thước, kiểm tra khuyết tật và điều khiển robot.
1. Phát hiện đường viền là gì (Contour Detection)?
Một "đường viền" (contour) trong xử lý ảnh là một đường cong nối các điểm liên tục (dọc theo đường biên của một đối tượng) có cùng cường độ sáng hoặc màu sắc, tách biệt đối tượng ra khỏi nền ảnh của nó. Không giống như các cạnh rời rạc (sự chuyển tiếp sáng-tối ở cấp độ pixel), các đường viền là các đường cong liên tục (hoặc các đường hở đối với các đối tượng không trọn vẹn) biểu diễn cho hình dạng hình dạng của toàn bộ đối tượng, chứ không chỉ là những thay đổi cường độ sáng riêng lẻ.
Mục tiêu chính của việc phát hiện đường viền là đơn giản hóa dữ liệu hình ảnh: giảm một hình ảnh 2D thành các đường viền 1D giúp máy móc phân tích hình học của một vật thể (kích thước, góc, tính đối xứng) một cách hiệu quả, mà không cần xử lý từng điểm ảnh — điều này rất quan trọng đối với các ứng dụng thời gian thực nơi tốc độ và độ chính xác đều có tầm quan trọng như nhau.
2. Nguyên tắc cốt lõi
Phát hiện đường viền dựa trên hai bước chính: tiền xử lý (tăng cường độ tương phản giữa vật thể và nền) và trích xuất đường viền (xác định các điểm đường biên). Hai bước này giúp giải quyết các khuyết điểm của hình ảnh thô như nhiễu, ánh sáng không đồng đều hoặc độ tương phản thấp gây mờ ranh giới.
2.1 Tiền xử lý
Hình ảnh thô hiếm khi có các đường ranh giới rõ ràng, vì vậy việc tiền xử lý là rất quan trọng:
Chuyển sang ảnh xám : Hầu hết các thuật toán sử dụng hình ảnh xám đơn kênh (đơn giản hóa dữ liệu từ ba kênh RGB thành một kênh, vì màu sắc thường không quan trọng).
Giảm tiếng ồn : Làm mờ Gaussian làm mịn hình ảnh bằng nhân Gaussian, cắt bỏ nhiễu tần số cao trong khi giữ lại các thay đổi cường độ chính - điều này rất quan trọng để tránh các cạnh giả do nhiễu cảm biến hoặc dao động ánh sáng.
Phát hiện cạnh : Nhận diện các thay đổi cường độ điểm ảnh (cạnh) tạo thành các đường viền. Bộ phát hiện cạnh Canny (một phương pháp đa giai đoạn: làm mịn, tính toán gradient, áp dụng nguyên tắc không tối đa, ngưỡng trễ) là tiêu chuẩn vàng, tạo ra các cạnh mỏng và liên tục. Toán tử Sobel, làm nổi bật các cạnh ngang/dọc, phù hợp để xác định các đường viền dày.
Ngưỡng hóa : Chuyển đổi bản đồ cạnh thang độ xám thành hình ảnh nhị phân (đen/trắng), với tiền cảnh (cạnh đối tượng) là 1 và hậu cảnh là 0—đơn giản hóa việc theo dõi đường viền.
2.2 Trích xuất đường viền
Sau khi xử lý trước, các thuật toán theo dõi các điểm ảnh nền trước được kết nối để tạo thành các đường viền. Mã chuỗi Freeman được sử dụng rộng rãi: nó biểu diễn các đường viền như các mã hướng (lên, xuống, trái, phải) so với điểm ảnh trước đó, giúp giảm dung lượng lưu trữ và dễ dàng so sánh hình dạng. Các thư viện như OpenCV đơn giản hóa việc này với các hàm như findContours(), hàm này trả về tọa độ điểm ảnh của đường viền và cho phép lọc (theo diện tích hoặc tỷ lệ khung hình) để loại bỏ nhiễu.

3. Kỹ thuật nâng cao
Các phương pháp truyền thống hoạt động tốt trong môi trường được kiểm soát, có độ tương phản cao, nhưng các tình huống thực tế (ánh sáng không đều, các vật thể chồng lấn lên nhau) đòi hỏi các phương pháp tiên tiến hơn:
Ngưỡng thích nghi : Tính toán ngưỡng cục bộ cho từng điểm ảnh (so với một ngưỡng toàn cục duy nhất), lý tưởng cho các hình ảnh có ánh sáng thay đổi (ví dụ: các bộ phận công nghiệp dưới đèn nhà máy).
Phát hiện dựa trên học sâu : Các mạng nơ-ron tích chập (CNN) trích xuất các đường viền trực tiếp từ hình ảnh thô, bỏ qua bước tiền xử lý thủ công. Các mô hình như HED (Holistically-Nested Edge Detector) và RCF (Richer Convolutional Features) kết hợp các đặc trưng CNN đa tỷ lệ để tạo bản đồ cạnh độ phân giải cao, vượt trội trong các cảnh phức tạp (ảnh y tế, môi trường lộn xộn).
4. Thách thức chính
Bất chấp những tiến bộ, vẫn còn các trở ngại trong thực tế:
Nhiễu và Ánh sáng : Sàn nhà máy, ánh sáng yếu hoặc môi trường ngoài trời gây ra các đường viền bị đứt/sai.
Các vật thể chồng lấp/bị che khuất : Các bộ phận xếp chồng lên nhau làm mờ các đường viền, khiến việc phân biệt hình dạng từng đối tượng trở nên khó khăn.
Vật liệu trong suốt/phản chiếu : Thủy tinh hoặc kim loại làm tán xạ ánh sáng, tạo ra các đường viền yếu/bị méo dạng.
Hiệu suất thời gian thực : Các nhiệm vụ công nghiệp (kiểm tra trên dây chuyền lắp ráp) đòi hỏi 30+ khung hình mỗi giây (FPS). Các mô hình học sâu cần được tối ưu hóa (lượng hóa, tăng tốc GPU) để đáp ứng yêu cầu về tốc độ.
5. Ứng dụng thực tế
Phát hiện đường viền thúc đẩy tự động hóa trong các ngành công nghiệp:
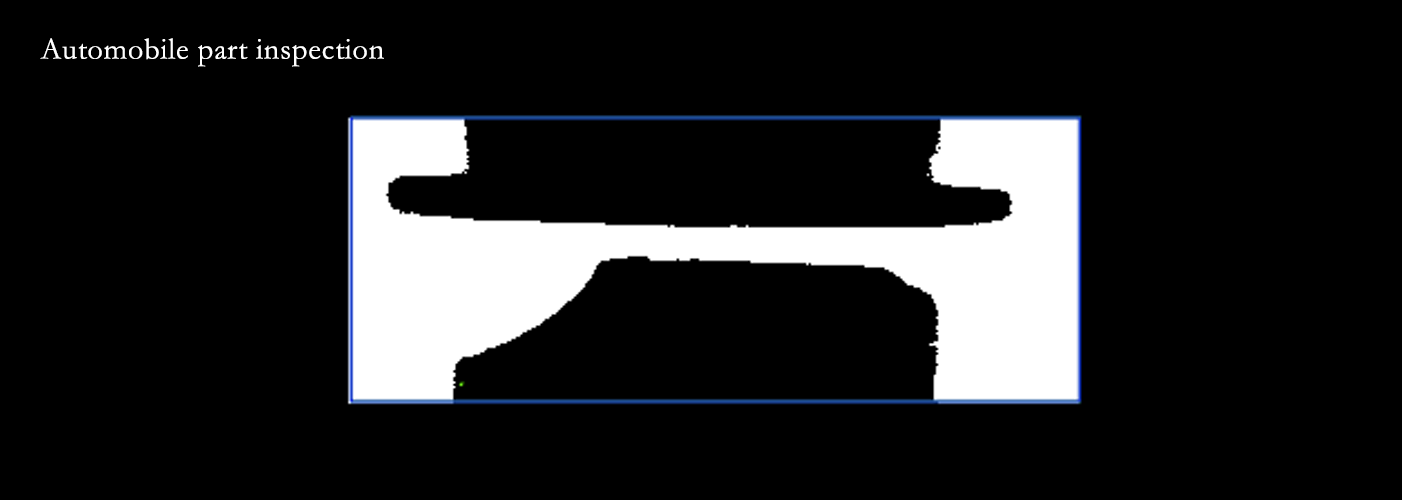
Kiểm tra chất lượng công nghiệp : Kiểm tra các lỗi (nứt, móp) trong sản xuất. Ví dụ, trong sản xuất ô tô, kiểm tra các bộ phận động cơ (bánh răng, gioăng) có đường viền khớp với thiết kế không, từ chối các bộ phận sai dung sai.
Robot gắp và đặt : Giúp robot xác định vị trí các vật thể. Trong kho bãi, các cánh tay robot sử dụng đường viền để tìm các gói hàng trên băng chuyền, tính toán tâm/hướng, và điều chỉnh độ bám.
Lĩnh vực hình ảnh y tế : Phân đoạn các cấu trúc giải phẫu (u bướu trong ảnh chụp CT, ranh giới tế bào trong tiêu bản mô học) để hỗ trợ chẩn đoán. Các mô hình học sâu xử lý tốt các mô sinh học biến đổi.
Nông nghiệp : Phân loại trái cây (táo, cam) theo kích thước/độ chín thông qua phân tích đường viền và phát hiện bệnh trên cây trồng từ những thay đổi ở đường viền lá.
Giám Sát Giao Thông : Theo dõi xe cộ, đo lưu lượng hoặc nhận diện tai nạn (thông qua đường viền bất thường hoặc vật thể đứng yên) bằng camera giám sát.
6. Xu hướng tương lai
Ba xu hướng sẽ định hình phát hiện đường viền:
Tích hợp AI biên : Các mô hình nhẹ (CNN định lượng) trên các thiết bị biên (máy ảnh công nghiệp, drone) cho phép xử lý thời gian thực mà không phụ thuộc vào đám mây - rất quan trọng cho robot tự động.
Kết hợp đa phương thức : Kết hợp dữ liệu hình ảnh với LiDAR/hình ảnh nhiệt giúp cải thiện khả năng phát hiện trong điều kiện khó khăn (ví dụ: hình ảnh nhiệt làm nổi bật các đường viền trong môi trường ánh sáng yếu; LiDAR cung cấp độ sâu 3D để phân biệt các vật thể chồng lấn).
AI có thể giải thích (XAI) : Các kỹ thuật XAI sẽ làm rõ cách các mô hình học sâu phát hiện các đường viền, từ đó xây dựng niềm tin trong các lĩnh vực quan trọng (chẩn đoán y tế, kiểm tra hàng không vũ trụ).
Kết luận
Phát hiện đường viền trong thị giác máy kết nối dữ liệu hình ảnh thô với các thông tin có thể hành động, thúc đẩy tự động hóa và kiểm soát chất lượng. Từ phương pháp phát hiện cạnh truyền thống đến học sâu, công nghệ này đã phát triển để giải quyết các thách thức phức tạp. Khi công nghệ tiếp tục tiến bộ, nó sẽ vẫn đóng vai trò trung tâm trong các hệ thống thông minh, giúp máy móc trở nên năng lực và đáng tin cậy hơn trong nhiều ngành công nghiệp.





