

Kernfunktionen des Frame-Grabbers für industrielle Kameras (6 zentrale Punkte)
Der Framing-Grabber fungiert als Signal-Hub und Hochgeschwindigkeits-Datenkanal in Maschinenvisionsystemen. Er verbindet industrielle Kameras mit dem Host-Computer und ermöglicht Signalumwandlung, Hochgeschwindigkeitstransfer, präzise Zeitsteuerung, Synchronisation mehrerer Kameras, Störunterdrückung sowie Hardware-basierte Vorverarbeitung.
1. Signalumwandlung und Protokolldigitalisierung (Kernfunktion)
Analogkameras: Führt eine ADC-Umwandlung (Analog-Digital-Konvertierung) durch, um analoge Videosignale in digitale Pixelströme zu konvertieren.
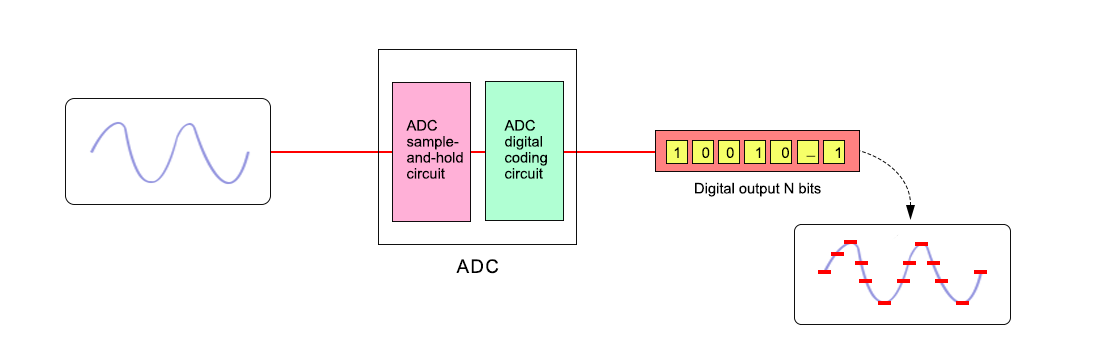
Digitalkameras: Interpretiert industrielle Kommunikationsprotokolle wie Camera Link, CoaXPress (CXP) und GigE Vision, führt die physikalische Schnittstellen- und Protokollübersetzung durch und gibt computerlesbare Bildformate aus (z. B. RAW → RGB/YUV).
2. Hochgeschwindigkeits-Übertragung mit stabilem Bildaufbau und Vermeidung von Bildverlust
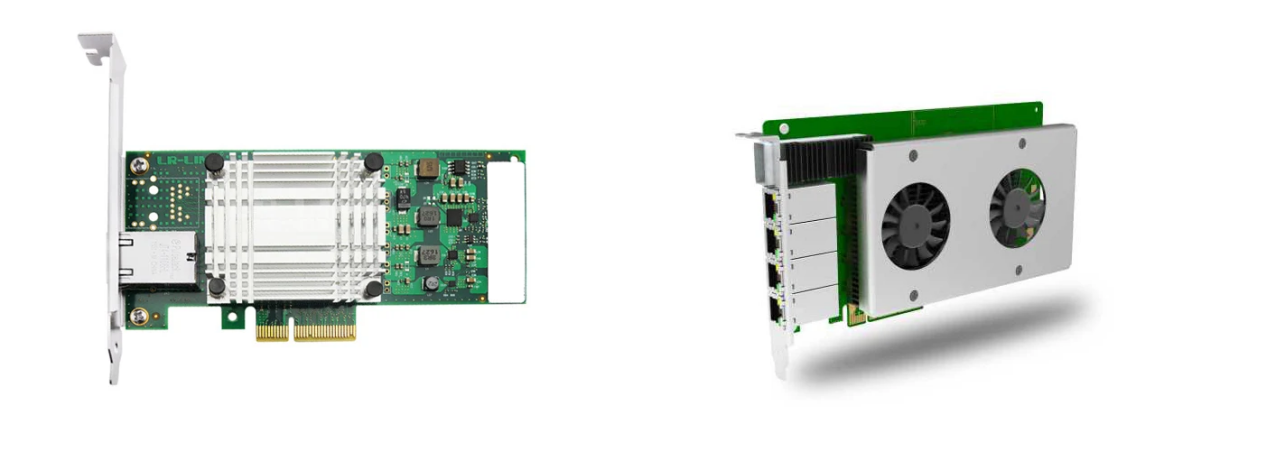
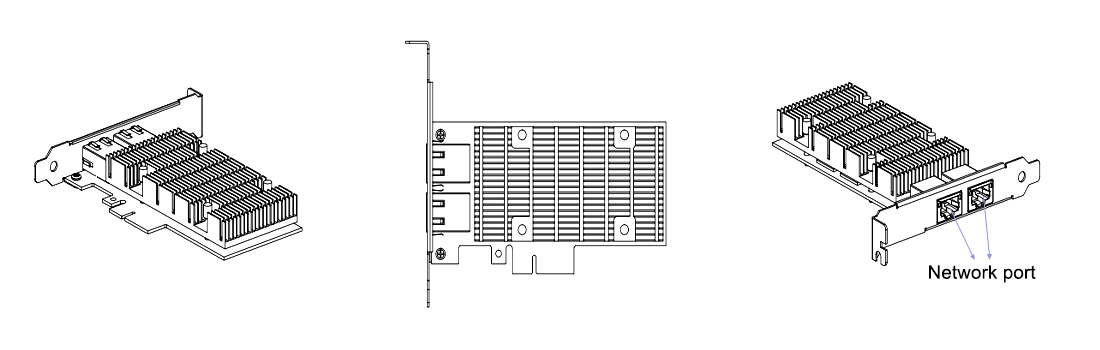
Bietet eine Hochgeschwindigkeits-PCIe-Bus-Schnittstelle (z. B. PCIe x4/x8/x16), um die Bandbreitenanforderungen von Kameras mit hoher Auflösung und hoher Bildfrequenz (12,5 Gbps pro CXP-12-Kanal) zu erfüllen.
Verfügt über einen integrierten Hochgeschwindigkeitsspeicher (DDR), um die Datenraten-Diskrepanz zwischen Kamera und Host auszugleichen und so effektiv Bildverlust sowie Bildzerreißen zu verhindern.
Beinhaltet industrielle Signalconditioning- und Isolierungstechnik zur Abwehr elektromagnetischer Störungen (EMI), was eine stabile Datenübertragung auch in rauen industriellen Umgebungen gewährleistet.
3. Präzise Zeitsteuerung durch Trigger (Hardware-Ebene)
Unterstützt externes Auslösen (z. B. Lichtschranken, Drehgeber), softwarebasiertes Auslösen sowie zeitgesteuertes Auslösen mit einer Antwortlatenz im Mikrosekundenbereich.
Steuert präzise Belichtungszeit und Bildfrequenz und eignet sich daher für die Erfassung schneller Bewegungen (z. B. Sortierung auf Fertigungsstraßen, Messung von Halbleitern); ermöglicht wiederholbare, hochpräzise Bildaufnahmen.
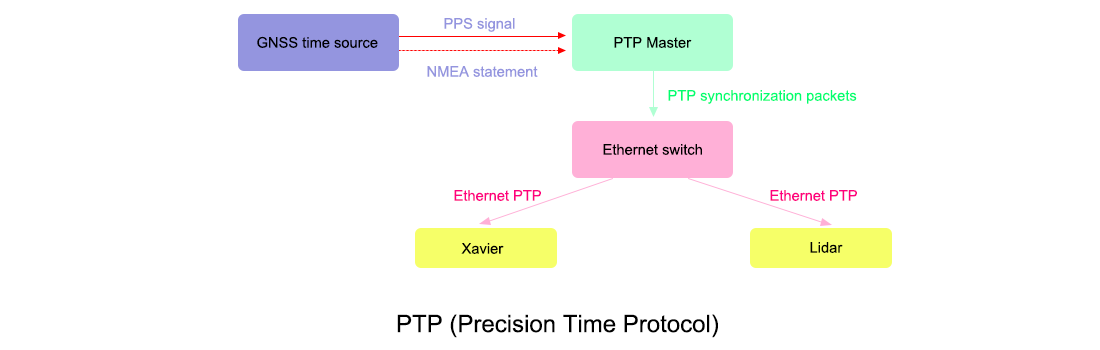
4. Multikamera-Synchronisation und Koordination
Gibt ein einheitliches Synchronisationssignal aus (z. B. PTP (Precision Time Protocol), GenLock), um die synchrone Belichtung mehrerer Kameras zu ermöglichen und so die Datenkonsistenz für Stereo-Vision und 360°-Inspektion sicherzustellen.
Unterstützt die gleichzeitige Erfassung über mehrere Kanäle, um die Anforderungen einer parallelen Inspektion aus mehreren Blickwinkeln bzw. an mehreren Stationen zu erfüllen.
5. Hardware-basierte Vorverarbeitung (High-End-Modelle)
Integriert FPGA-/ASIC-Chips zur hardwarebeschleunigten Verarbeitung, darunter Rauschreduzierung, Farbkorrektur, Ausschnittserstellung (ROI – Region of Interest) und Bayer-Interpolation.
Verringert die Last auf der Host-CPU/GPU und verbessert die Echtzeit-Leistung sowie den Durchsatz des Systems (z. B. bei hochgeschwindigkeitsbasierten AOI-Inspektionen).
6. Systemintegration und Steuerung
Bietet digitale Ein-/Ausgangsschnittstellen für eine nahtlose Integration mit SPS-Systemen (PLCs) und Bewegungssteuerungen, um einen geschlossenen Workflow aus „Erfassung – Analyse – Steuerung“ zu ermöglichen.
Erfüllt den GenICam-Standard und gewährleistet damit die Kompatibilität mit Kameras verschiedener Hersteller sowie eine vereinfachte Systemintegration.
Ergänzung: Wann ein Framegrabber zwingend erforderlich ist
Bei Hochgeschwindigkeits-/Hochauflösungskameras (z. B. Bandbreite >10 Gbps, Bildfrequenz >1000 fps), bei denen Standard-Ethernet-/USB-Schnittstellen nicht ausreichend sind.
Wenn eine Auslösung und Synchronisation im Mikrosekundenbereich erforderlich ist (z. B. bei der Halbleiterinspektion oder der Roboterführung).
Bei mehrkamerabasierten kooperativen Systemen (z. B. Stereo-Vision, parallele Inspektion an mehreren Stationen).
In stark störanfälligen industriellen Umgebungen, in denen eine hardwareseitige Isolation für einen stabilen Betrieb erforderlich ist.





