Menterjemahkan Penglihatan Kamera Industri: Pemeriksaan Prinsip Secara Terperinci
Kamera industri adalah 'mata' kepada visi mesin, dan memahami prinsip asasnya adalah kunci untuk mengoptimumkan prestasi. Artikel ini menerangkan teknologi asas di sebalik visi kamera industri, membantu jurutera dan peminat memahami mekanisme dalaman dan menetapkan sistem mereka untuk kejayaan.
1. Komponen Utama Kamera Industri
Sebelum kita meneroka lebih lanjut mengenai prinsipnya, marilah kita fahami blok asas berikut:
Sistem optik: Kanta adalah 'jantung' pengumpulan cahaya. Pemilihan kanta yang sesuai dengan medan penglihatan, kedalaman medan, dan resolusi aplikasi adalah sangat penting. Contohnya, kamera 5 megapiksel memerlukan kanta yang mampu menyelesaikan butiran halus sehingga saiz piksel.
Sensor: Sensor CMOS atau CCD menukarkan cahaya kepada isyarat elektrik. Ukuran Utama termasuk Kecekapan Kuantum (QE) , yang seeloknya melebihi 60% untuk penukaran cahaya yang optimum, dan Julat dinamik , yang perlu melebihi 70dB untuk mengendalikan julat keamatan cahaya yang luas.
Pemproses Imej: Komponen ini mengendalikan tugas-tugas seperti Interpolasi Bayer , pengurangan bunyi bising , dan pembetulan warna , menggunakan algoritma seperti matriks 3x3 untuk menyeimbangkan aras putih.

2. Prinsip Asas Penglihatan Kamera Industri
Setelah imej diambil, prinsip-prinsip maju ini akan diaplikasikan untuk mengekstrak data yang bermakna:
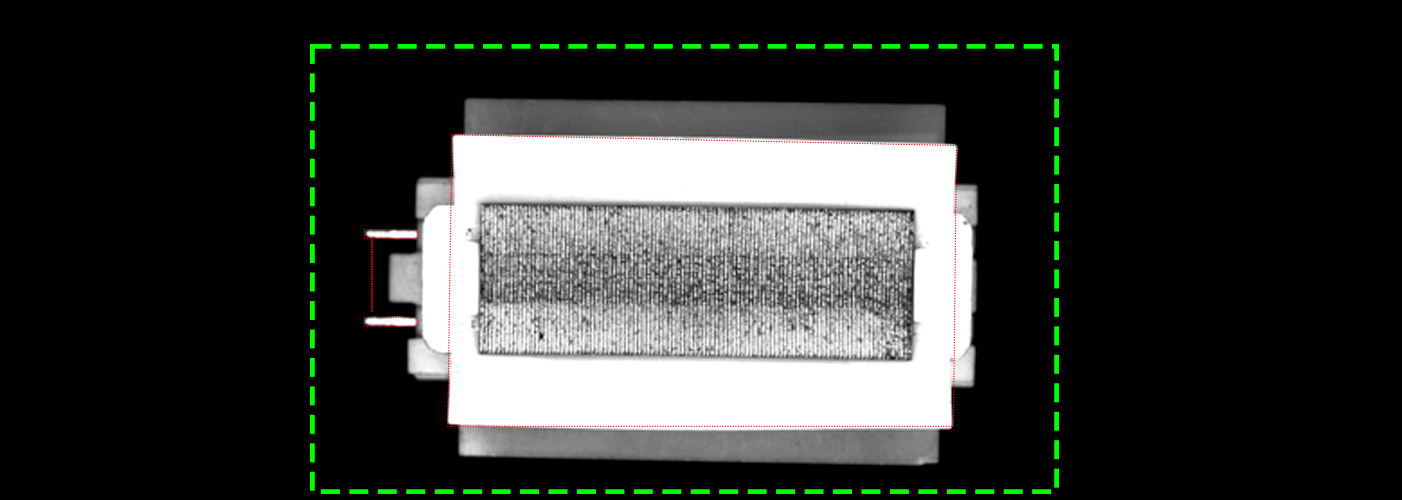
Pengekstrakan Ciri: Algoritma seperti operator Canny untuk pengesanan tepi aTAU Korelasi Silang Termunormal (NCC) untuk penyesuaian templat digunakan untuk mengenal pasti sasaran tertentu dengan kepersisan sub-piksel, sering mencapai ketepatan sehingga 0.1px.
Pembetulan Sosangan: Untuk memastikan ketepatan pengukuran, ralat disongsangkan dengan menggunakan kaedah kalibrasi. Ini mengira pekali ralat sfera dan tangen (k1,k2,p1,p2) supaya ralat pengukuran kekal dalam julat ±0.05mm.
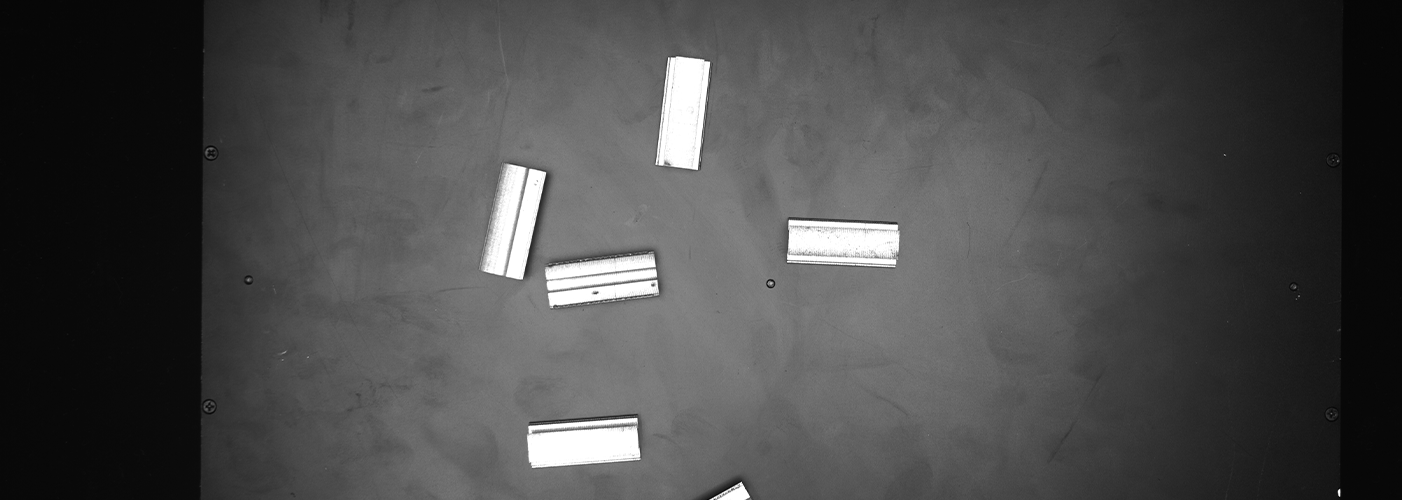
Pemadanan Pergerakan: Bagi objek yang bergerak, adalah penting untuk mengelakkan keburaman. Ini dicapai dengan melaraskan masa dedahan berdasarkan kelajuan objek (contoh: masa dedahan ≤500μs bagi objek yang bergerak pada kelajuan 1m/s) dan menggunakan sekter geganti.
3. Aplikasi Praktikal Sistem Kamera Industri
Prinsip-prinsip ini digunakan di pelbagai industri:
Pengukuran Dimensi: Dengan memetakan piksel kepada skala dunia sebenar (contoh: 1px = 0.02mm), sistem-sistem ini boleh melakukan pengukuran yang sangat tepat dengan ulangan sebanyak ±1μm.
Pengesanan Kecacatan: Dengan menggunakan model pembelajaran mendalam seperti ResNet18 , kamera industri boleh mengklasifikasikan calar permukaan dan kecacatan lain dengan ketepatan melebihi 99.5%.
Penuntunan Robotik: Melalui kalibrasi berbilang titik, sistem-sistem ini boleh menuntun robot dengan menterjemahkan koordinat kamera kepada sistem koordinat robot dengan ralat yang minimum, biasanya kurang daripada 0.1°.