Industriële Camera-visie ontcijferd: Een diepgaande blik op inspectieprincipes
Industriële camera's zijn de ogen van machinevisie, en het begrijpen van hun kernprincipes is essentieel om de prestaties te optimaliseren. In dit artikel worden de fundamentele technologieën achter industriële camera-visie uitgelegd, zodat ingenieurs en enthousiastelingen de werking kunnen begrijpen en hun systemen kunnen verfijnen voor succes.
1. De kerncomponenten van een industriële camera
Voordat we ons verdiepen in de principes, laten we de essentiële bouwstenen begrijpen:
Optische systeem: Het objectief is het lichtverzamelende hart. Het is cruciaal om een objectief te kiezen dat past bij het toepassingsgebied qua gezichtsveld, scherptediepte en resolutie. Een camera van 5 megapixels vereist bijvoorbeeld een objectief dat fijne details tot op pixelniveau kan onderscheiden.
Sensor: De CMOS- of CCD-sensor zet licht om in elektrische signalen. Belangrijkste metrieken inclusief Quantumrendement (QR) , wat ideaal boven de 60% moet zijn voor optimale lichtconversie, en Dynamisch bereik , wat boven 70 dB moet zijn om een breed bereik aan lichtintensiteiten te kunnen verwerken.
Beeldprocessor: Dit onderdeel zorgt voor taken zoals Bayer-interpolatie , geruisreductie , en kleurcorrectie , met behulp van algoritmen zoals een 3x3-matrix om de witbalans te regelen.

2. Kernprincipes van industriële camera-visie
Zodra de afbeelding is vastgelegd, treden deze geavanceerde principes in werking om bruikbare gegevens te verkrijgen:
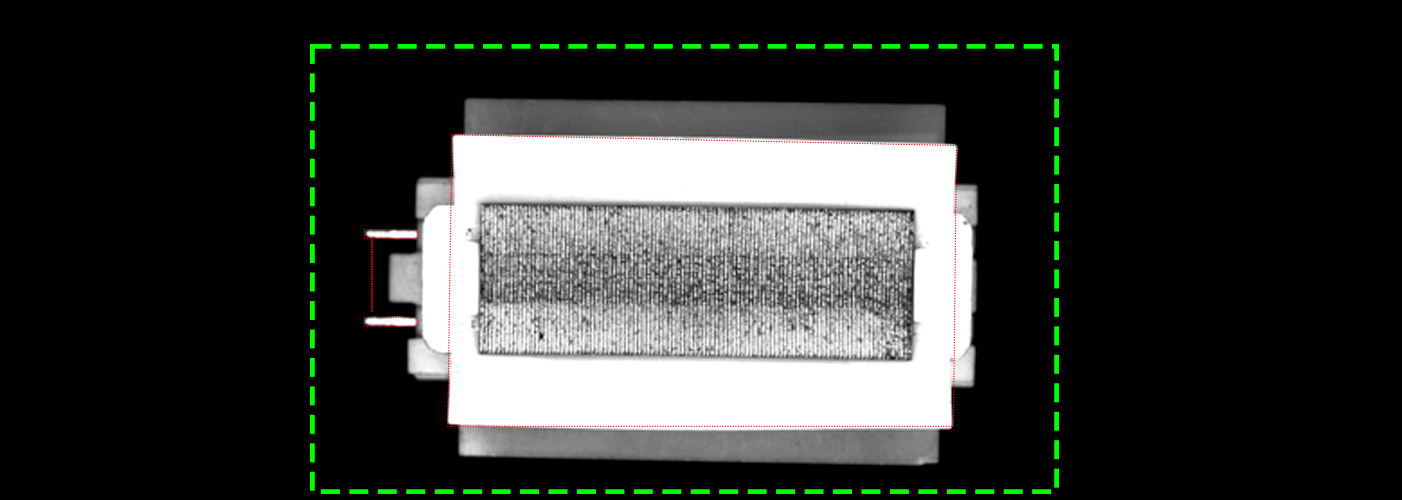
Functie-extractie: Algoritmen zoals de Canny-operator voor randdetectie of Genormaliseerde Kruiscorrelatie (NCC) voor sjabloonsvergelijking worden gebruikt om specifieke doelen met subpixelnauwkeurigheid te lokaliseren, vaak een nauwkeurigheid van 0,1px bereikend.
Vervormingscorrectie: Om de meetnauwkeurigheid te garanderen, wordt vervorming gecorrigeerd met behulp van kalibratiemethoden. Hiermee worden radiale en tangentiële vervormingscoëfficiënten (k1,k2,p1,p2) berekend om de meetfouten binnen ±0,05mm te houden.
Bewegingscompensatie: Voor bewegende objecten is het essentieel om onscherpte te voorkomen. Dit wordt gerealiseerd door de belichtingstijd aan te passen op basis van de snelheid van het object (bijvoorbeeld een belichtingstijd van ≤500μs voor een object dat zich verplaatst met 1m/s) en het gebruik van een globale sluitersnelheid.
3. Praktische toepassingen van industriële camerasystemen
Deze principes worden in verschillende industrieën toegepast:
Afmetingsmeting: Door pixels te kalibreren naar een realistische schaal (bijvoorbeeld 1px = 0,02mm), kunnen deze systemen zeer nauwkeurige metingen uitvoeren met een herhaalbaarheid van ±1μm.
Defectdetectie: Met behulp van deep learning-modellen zoals ResNet18 , kunnen industriële camera's oppervlakkige krassen en andere defecten classificeren met een nauwkeurigheid van meer dan 99,5%.
Robotgeleiding: Via multi-puntkalibratie kunnen deze systemen robots begeleiden door cameracoördinaten te vertalen naar het coördinatensysteem van de robot met minimale fouten, vaak minder dan 0,1°.