

Różnica między kamerami obszarowymi a kamerami linijkowymi
Kamery przesuwu powierzchniowego i kamery przesuwu liniowego różnią się znacznie pod względem zasady działania, scenariuszy zastosowań itp., jak poniżej:
1. Główne różnice: struktura i metoda tworzenia obrazu
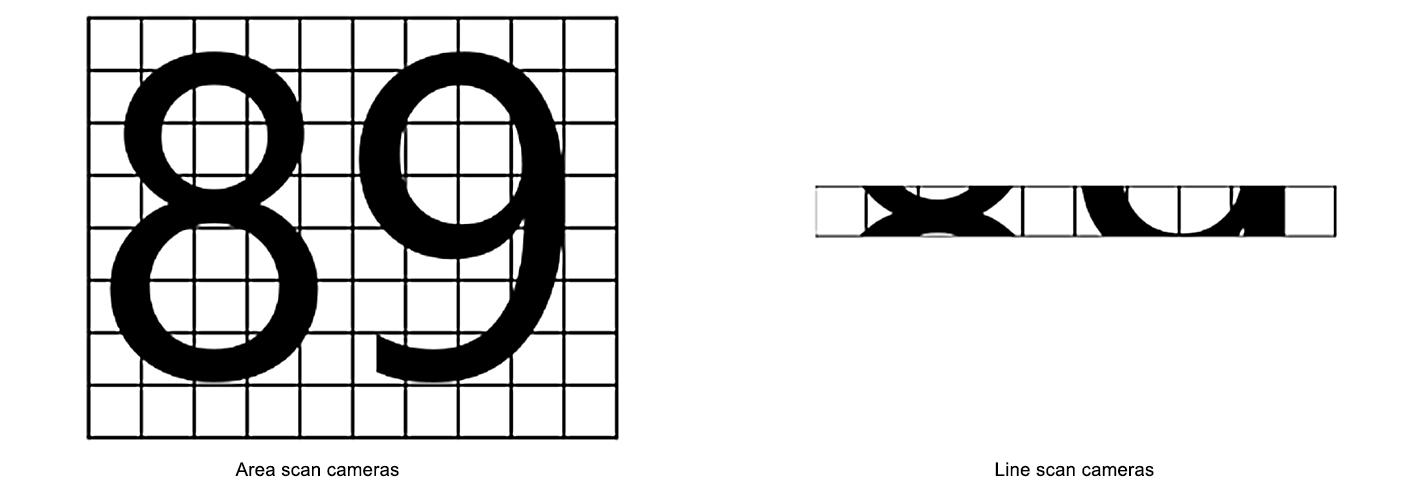
Kamery skanujące obszarowe: Czujnik jest dwuwymiarową płaszczyzną (podobną do macierzy). Kompletny obraz dwuwymiarowy można bezpośrednio nagrać jednym ujęciem. Codziennie używane urządzenia, takie jak telefony komórkowe i lustrzanki cyfrowe, należą do kamer przesuwu powierzchniowego.
Kamery skanujące liniowo: Czujnik jest linią (jednowymiarowym układem). Wymaga współpracy z ruchem obiektu lub kamery (np. ruchem taśmy transportowej, skanowaniem kamery), aby przechwytywać obrazy linia po linii, a następnie składać je w obraz dwuwymiarowy. To działa jak zamiatanie podłogi miotłą – pokrywa całą powierzchnię dzięki ruchowi.
2. Różnice dotyczące scenariuszy zastosowań
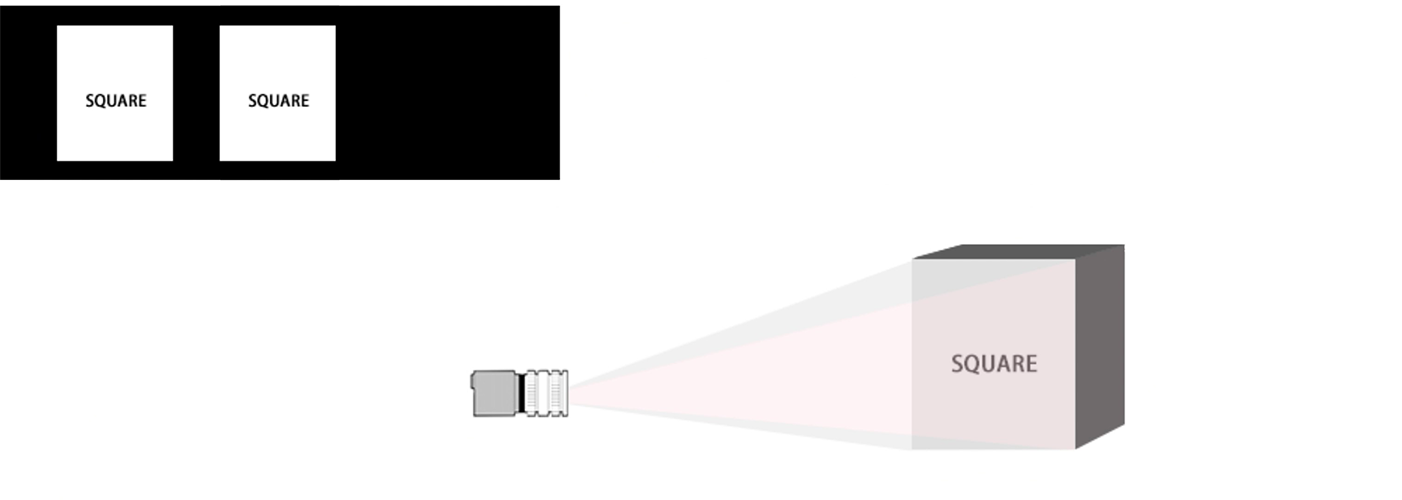
Kamery skanujące obszarowe: Odpowiednie do nagrywania obiektów nieruchomych lub poruszających się powoli, takich jak zdjęcia do dokumentów, kontrola jakości statycznych produktów, fotografia codzienna itp. Ich zaletą jest prosta obsługa i szybkie uzyskiwanie pełnych obrazów.
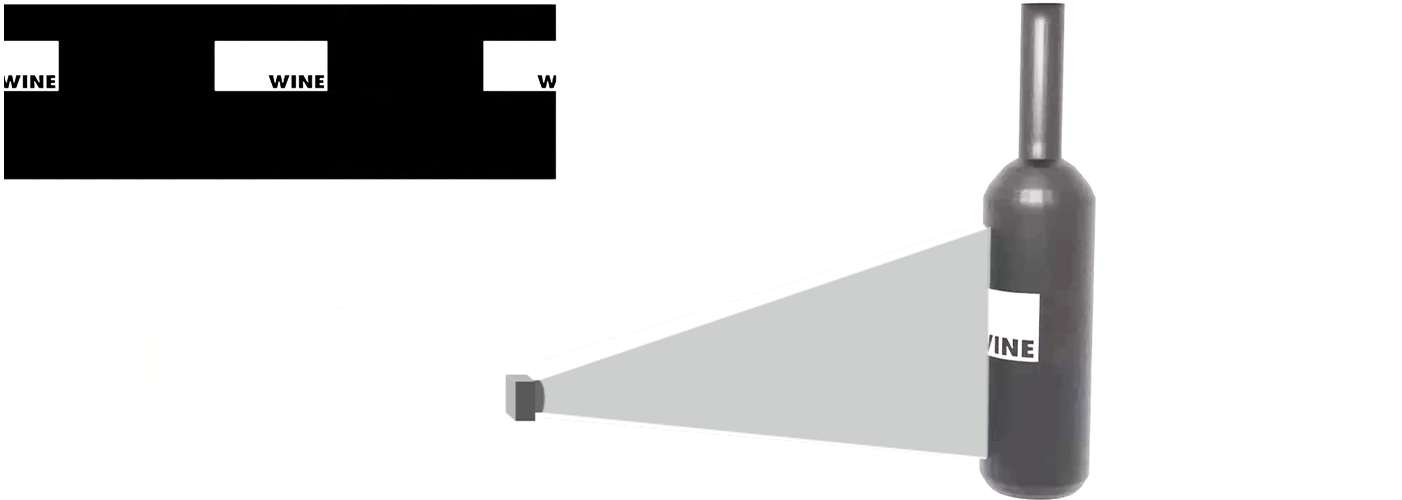
Kamery skanujące liniowo: Odpowiedni do nagrywania dużych obszarów, szybko poruszających się obiektów, takich jak ciągła kontrola tkanin i papieru, skanowanie dróg, kontrola jakości wyrobów drukowanych itp. Ich zaletą jest wyższa rozdzielczość obrazu oraz wyraźniejsze detale w przypadku długich pasm lub ciągłego ruchu.
3. D óżnice w zasadach działania
Główną różnicą w zasadach działania kamer typu area scan i kamer typu line scan jest struktura czujnika i metoda tworzenia obrazu, jak następuje:
(1).Zasada działania kamer typu area scan
Struktura czujnika: Jądrem jest dwuwymiarowy czujnik matrycowy (np. CCD lub CMOS), składający się z wielu pikseli tworzących płaszczyznę macierzy (podobną do siatki).
Proces tworzenia obrazu: Gdy przesłona jest otwarta, światło oświetla cały czujnik polowy przez obiektyw w tym samym czasie. Każdy piksel czujnika odbiera światło synchronicznie i przekształca je w sygnały elektryczne. Po przetworzeniu powstaje kompletny dwuwymiarowy obraz (wraz z informacją o szerokości i wysokości).
Cechy: Uzyskanie całego obrazu może zostać zakończone w jednym cyklu ekspozycji, bez konieczności korzystania z ruchu zewnętrznego, dlatego jest odpowiedni do przechwytywania obiektów nieruchomych lub poruszających się z niewielką prędkością.
(2).Zasada działania kamer liniowych
Struktura czujnika: Jądrem jest jednowymiarowy czujnik liniowy, którego piksele są ułożone w linii prostej (zawiera tylko jeden rząd pikseli).
Proces tworzenia obrazu: Czujnik liniowy może zbierać informacje obrazowe tylko jednej linii w danym czasie (zawierając jedynie informację o szerokości). Musi on polegać na jednostajnym ruchu obiektu (np. napędzanym przez taśmę przenośną) lub na ruchu skanującym samej kamery, aby czujnik mógł zbierać obrazy linii w różnych pozycjach linia po linii. Następnie ciągłe obrazy linii są łączone przez oprogramowanie, tworząc w końcu kompletny dwuwymiarowy obraz (szerokość + długość powstała w wyniku ruchu).
Cechy: Wymaga współpracy z zewnętrznym ruchem, nadaje się do obrazowania obiektów ciągłych, szybko poruszających się lub o dużej powierzchni, a także może zachować wysoką rozdzielczość podczas ruchu.
4. Inne kluczowe różnice
Rozdzielczość i częstotliwość klatki: Kamery liniowe zazwyczaj mają więcej pikseli w jednym kierunku i mogą osiągać wizualizację o wysokiej rozdzielczości przy szybkim ruchu; kamery powierzchniowe mają bardziej elastyczną częstotliwość klatek (liczbę klatek na sekundę), co czyni je odpowiednimi do przechwytywania obrazów chwilowych.
Koszt i złożoność: Kamery liniowe wymagają wyposażenia w urządzenia sterujące ruchem, dlatego system jest bardziej skomplikowany, a koszt wyższy; systemy kamer powierzchniowych są proste, a koszt jest stosunkowo niski.





