

Сколько промышленных камер может поддерживать один хост в системе зрения?
В современных системах зрения определение количества камер, которые может поддерживать один хост (например, компьютер или сервер), является критическим вопросом для проектирования системы, ее масштабируемости и оптимизации затрат. Ответ зависит от нескольких взаимосвязанных факторов, включая возможности оборудования, эффективность программного обеспечения, спецификации промышленных камер и требования приложений. В данной статье рассматриваются эти ключевые переменные и предлагается методология для оценки вместимости камер в системе зрения.
1. Компоненты оборудования и их влияние
Оборудование хоста является основой поддержки камер, где два ключевых аспекта играют главную роль.
1.1 Обрабатывающие блоки: CPU и GPU
ЦПУ обрабатывает широкий спектр задач обработки изображений, от базового фильтра до сложного вывода машинного обучения. Камеры с высоким разрешением или частотой кадров создают большие объемы данных, нагружая ЦПУ. Многопроцессорные ЦПУ, такие как Intel i9 или AMD Threadripper, могут распределять задачи между ядрами для параллельной обработки. С другой стороны, ГПУ трансформируют системы зрения, ускоряя параллельные вычисления, особенно важные для задач, таких как 3D-видение и глубокое обучение в автономном вождении. Камеры, интегрированные с оптимизированными пайплайнами ГПУ, такими как CUDA в ГПУ NVIDIA, переносят обработку с ЦПУ, потенциально увеличивая количество поддерживаемых камер в три раза.
1.2 Память, Хранилище и Ввод/Вывод
Достаточное количество ОЗУ необходимо для буферизации видеопотоков и обработанных данных. Камера 4K с частотой 30 кадров в секунду генерирует около 300 МБ/с несжатых данных, что увеличивает требования к памяти в системах с несколькими камерами. Для камер высокого разрешения выделяйте как минимум 4–8 ГБ ОЗУ на каждую камеру. Высокоскоростное хранилище, например NVMe SSD, и надежные интерфейсы ввода-вывода, такие как USB 3.2 и PCIe, важны для приема и хранения данных. Устаревшие интерфейсы могут значительно ограничить масштабируемость системы.
2. Промышленности Параметры камеры
Параметры промышленной камеры непосредственно влияют на нагрузку на управляющую систему, главным образом через следующие два ключевых фактора.
2.1 Разрешение и частота кадров
Более высокое разрешение и частота кадров означают больше данных для обработки. Камера 4K производит в четыре раза больше пикселей, чем камера 1080p, значительно увеличивая требования к обработке. Аналогично, камера с частотой 120 кадров в секунду генерирует в четыре раза больше данных, чем камера с частотой 30 кадров в секунду. В спортивных трансляциях используются камеры с высоким разрешением и высокой частотой кадров, но они создают чрезвычайно высокую нагрузку на систему, требуя мощного оборудования для избежания потери качества.
2.2 Сжатие и Интерфейс
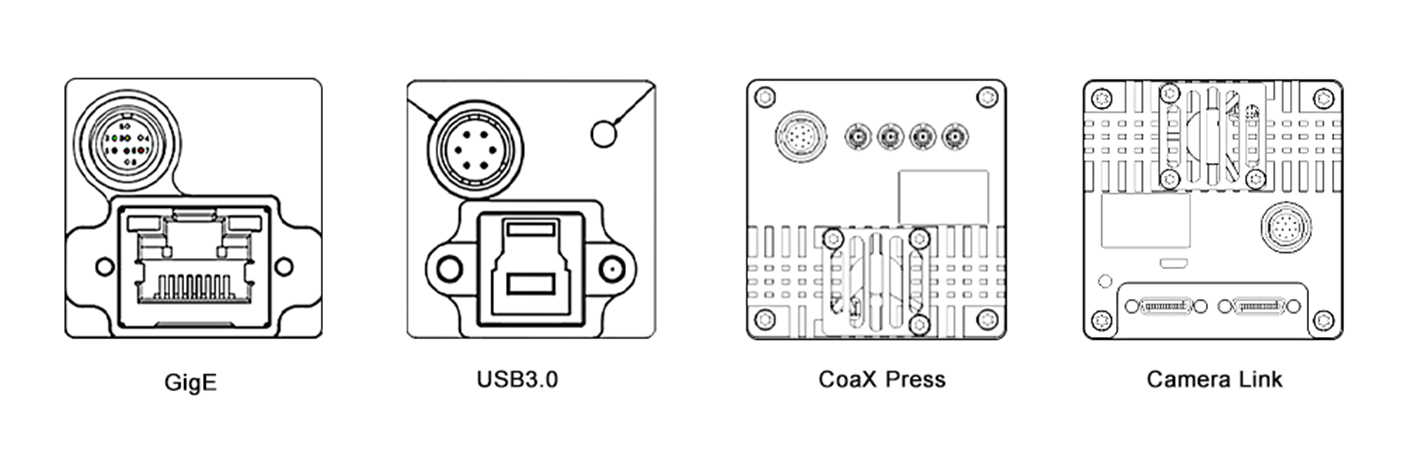
Выбор формата сжатия влияет на размер данных и объем обработки. Сжатые форматы, такие как H.264, уменьшают пропускную способность, но требуют декодирования на хосте. Несжатые форматы обеспечивают более высокую точность, но потребляют больше ресурсов. Кроме того, тип интерфейса камеры имеет решающее значение. Высокоскоростные интерфейсы, такие как GigE Vision и CoaXPress, позволяют эффективно передавать данные в многокамерных конфигурациях, тогда как устаревшие интерфейсы, такие как USB 2.0, ограничивают масштабируемость из-за ограниченной пропускной способности.
3. Программное обеспечение и Конвейер Обработки
Эффективность программного обеспечения является equally критичной, с этими двумя областями будучи ключевыми для производительности системы.
3.1 Операционная система и программные инструменты
Операционная система и её драйверы формируют программную основу. Реал-тайм операционные системы (RTOS) минимизируют задержки, идеальны для приложений, таких как роботическая контроль. Linux-базовые системы популярны из-за поддержки open-source. Оптимизированные драйверы улучшают производительность оборудования. Визуальное ПО и библиотеки, такие как OpenCV, MATLAB и deep learning фреймворки вроде TensorFlow и PyTorch, различаются в вычислительной эффективности. Например, хост, запускающий GPU-ускоренную модель YOLO, может поддерживать меньше камер, чем тот, который использует базовую детекцию границ из-за большей сложности.

3.2 Многопоточность и оптимизация
Эффективное многопоточное выполнение и параллелизация ключевы для максимизации производительности системы. Многопоточность позволяет задачам выполняться одновременно на ядрах CPU, в то время как параллелизация использует GPU для обработки данных. Технологии, такие как OpenMP и CUDA, предоставляют фреймворки для реализации. В многокамерной системе видеонаблюдения OpenMP может распределять обработку потоков с камер по ядрам CPU, а CUDA может ускорять анализ изображений на GPU, что позволяет обрабатывать больше камер.
4. Требования к приложению
Сложность задачи компьютерного зрения определяет распределение ресурсов, где реальное время и сложность обработки являются основными факторами.
4.1 Обработка в реальном времени vs офлайн обработка
Приложения в реальном времени, такие как автономное вождение и промышленная автоматизация, требуют немедленной обработки с низкой задержкой, ограничивая количество камер, которые может поддерживать хост. Офлайн-обработка, например, пакетный анализ видео, может обрабатывать больше камер, но результаты будут получены с задержкой.
4.2 Сложность обработки
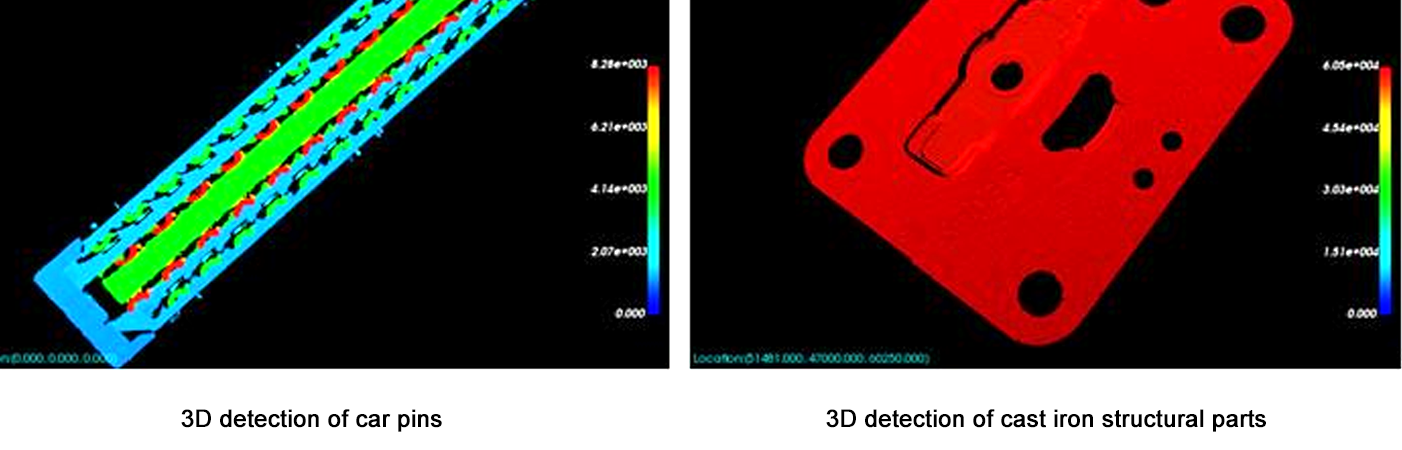
Простые задачи, такие как обнаружение движения, создают низкую вычислительную нагрузку, что позволяет хост-системе поддерживать больше камер. Сложные задачи, такие как трёхмерная реконструкция или продвинутое распознавание лиц, требуют значительных ресурсов, снижая количество поддерживаемых камер. Например, хост может поддерживать 10 камер для обнаружения движения, но только 3 для реального времени оценки глубины в 3D.
5. Фреймворк оценки
Используйте следующие шаги для оценки емкости камеры:
Определите параметры камеры: Разрешение, частота кадров, сжатие и интерфейс.
Рассчитайте пропускную способность данных: Несжатая скорость передачи данных = Разрешение × Частота кадров × Глубина бит / 8 (например, 1080p при 30 FPS = 1920×1080×30×24 / 8 = ~1,4 ГБ/с).
Оцените ограничения оборудования: Убедитесь, что мощность процессора/видеокарты ≥ общая пропускная способность данных × коэффициент обработки (2–5× для сложных задач).
Тестирование с прототипами: Используйте инструменты сравнения (например, Intel VTune, NVIDIA Nsight) для измерения использования ресурсов для одной камеры, затем линейно масштабируйте (с учетом корректировок на приобретения/потери при параллелизации).
Заключение
Количество камер, которое хост может поддерживать в системе зрения, не является фиксированным числом, а представляет собой баланс между возможностями оборудования, спецификациями камер, оптимизацией программного обеспечения и сложностью задач. Для большинства систем начинать с прототипа и постепенно масштабировать, контролируя использование ресурсов, является наиболее надежным подходом. Поскольку оборудование (например, более быстрые GPU, ускорители ИИ) и программное обеспечение (например, фреймворки краевого вычисления) продолжают стремительно развиваться, способность поддерживать больше камер с более высокой производительностью будет продолжать расти. Это развитие позволит создавать более сложные и масштабируемые решения в области компьютерного зрения, открывая новые возможности во многих отраслях, от здравоохранения и транспорта до безопасности и развлечений.
Эта статья предоставляет основное понимание для системных архитекторов и инженеров, подчеркивая необходимость настраиваемого тестирования и оптимизации для удовлетворения конкретных потребностей приложений. Осознанно учитывая все связанные факторы, можно спроектировать визуальные системы, которые будут как эффективными, так и способными справляться с постоянно растущими требованиями современных приложений.





